
一种物流无人机及其货物投放方法.pdf

茂学****23


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种物流无人机及其货物投放方法.pdf
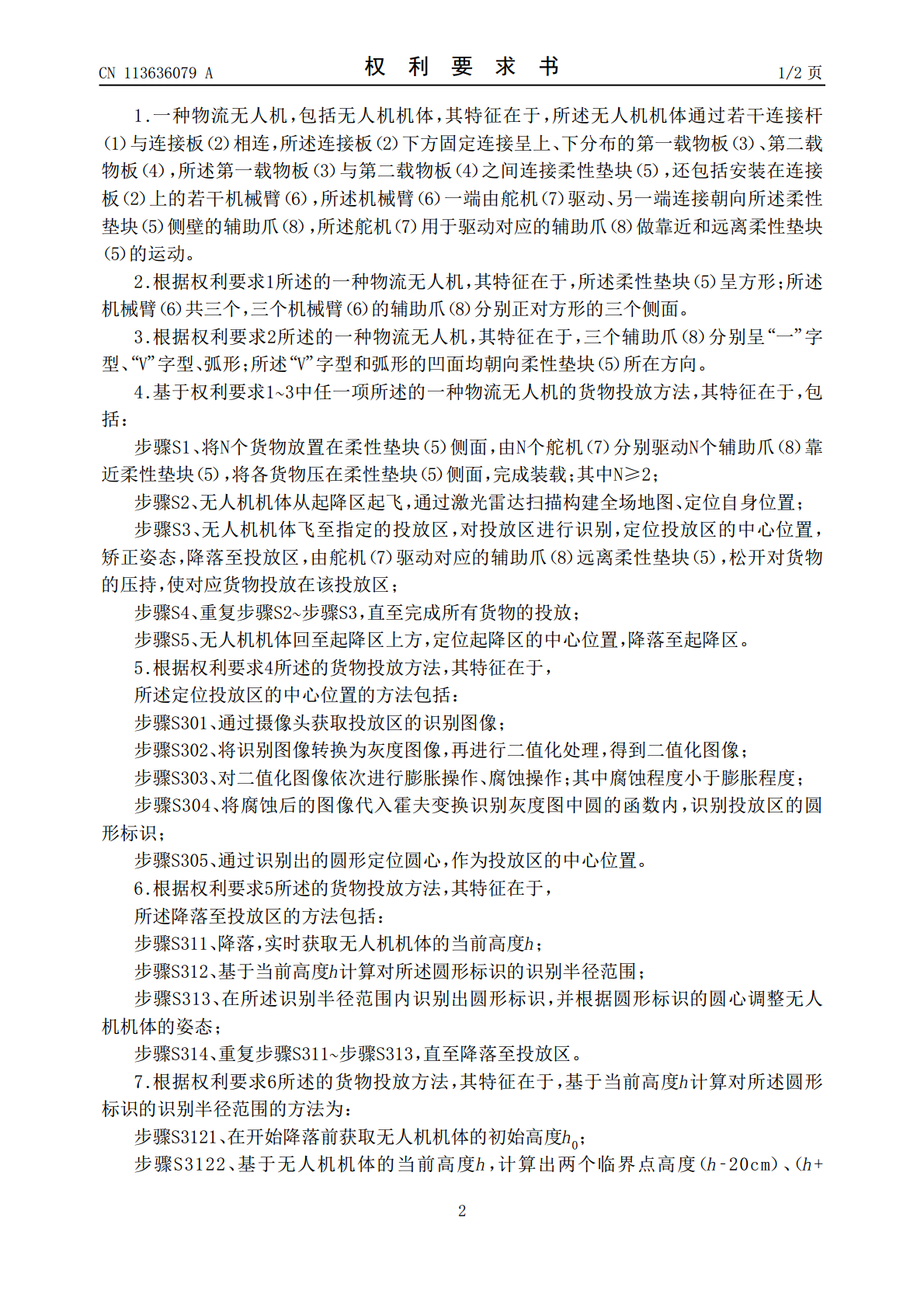
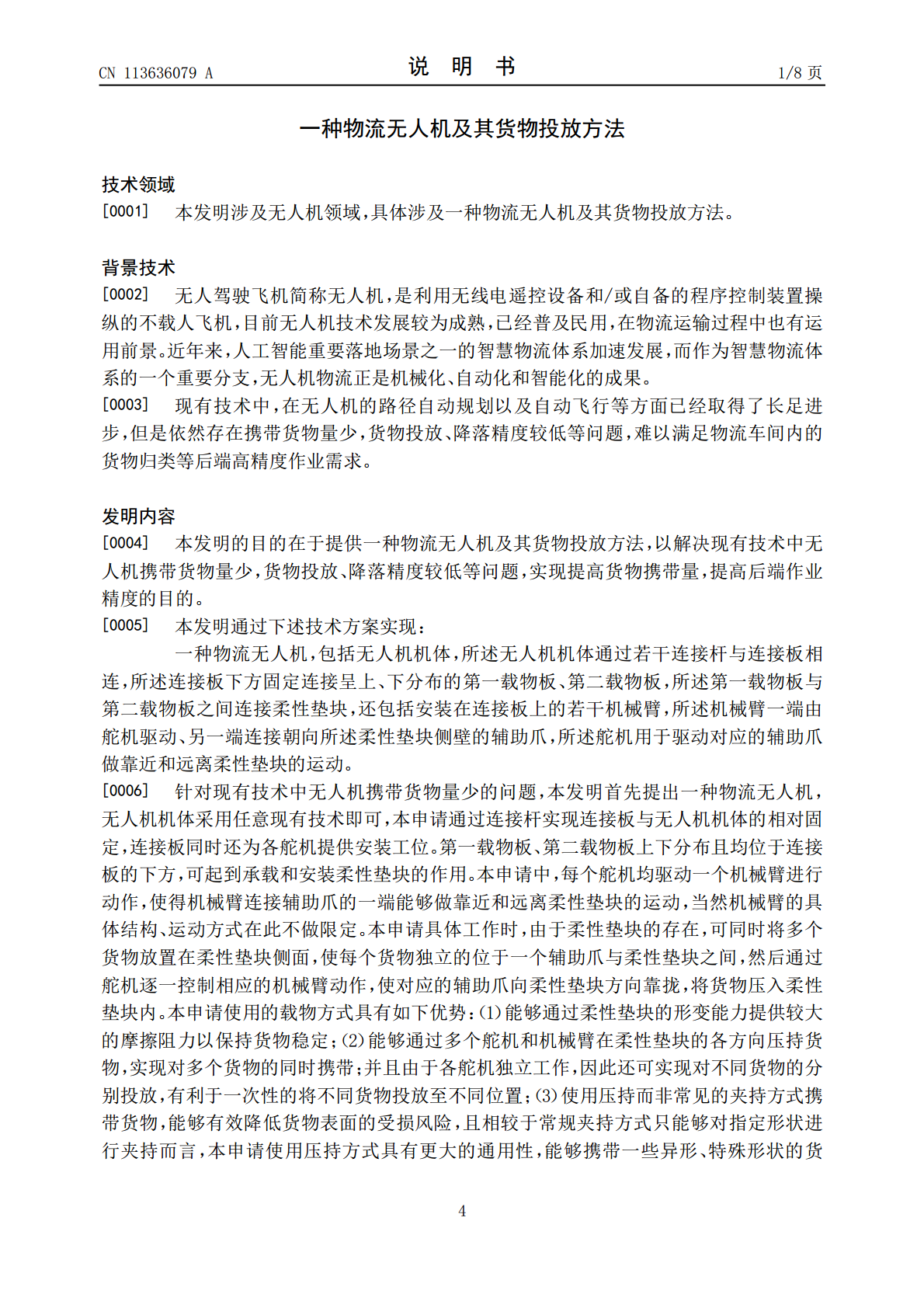
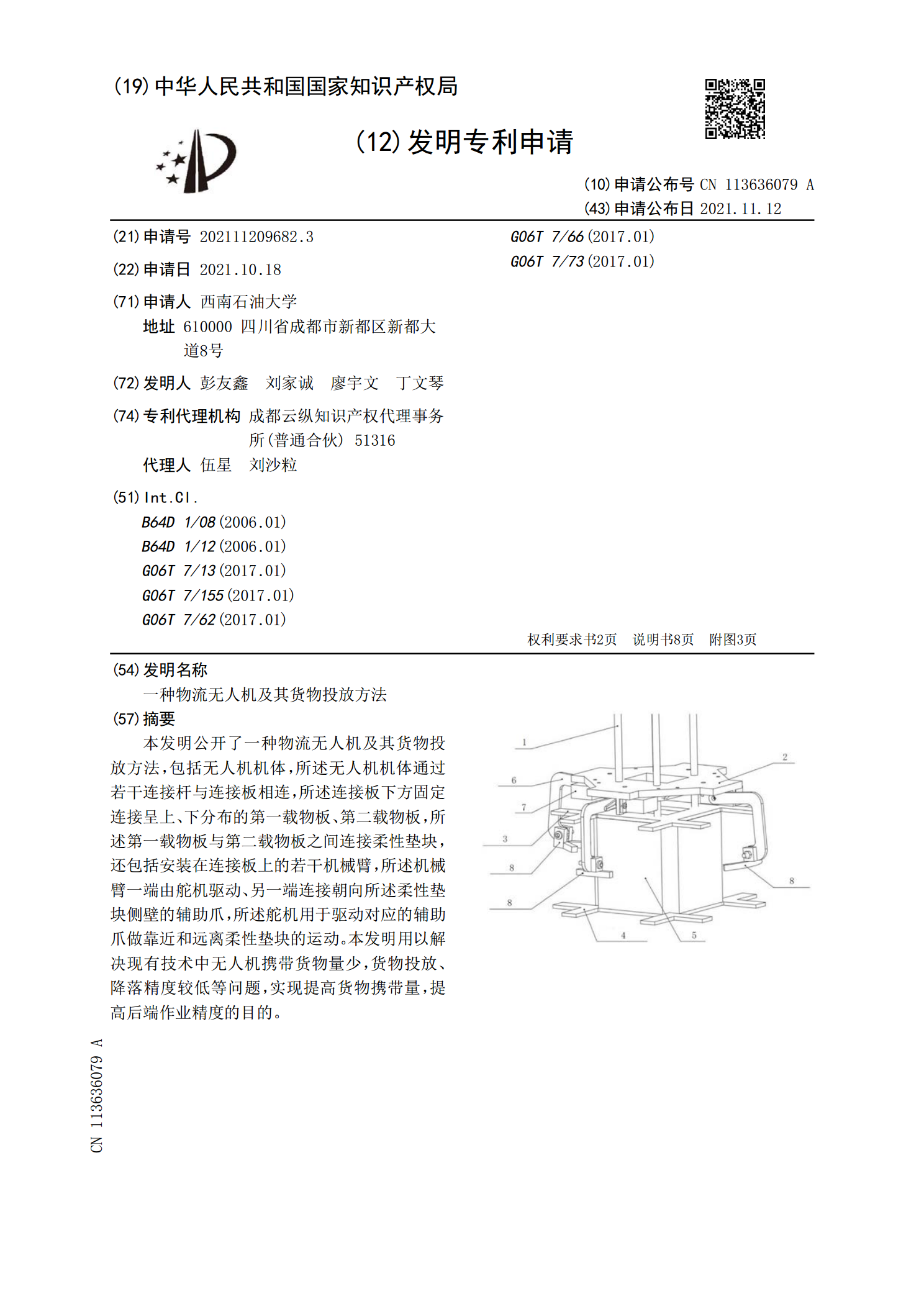
本发明公开了一种物流无人机及其货物投放方法,包括无人机机体,所述无人机机体通过若干连接杆与连接板相连,所述连接板下方固定连接呈上、下分布的第一载物板、第二载物板,所述第一载物板与第二载物板之间连接柔性垫块,还包括安装在连接板上的若干机械臂,所述机械臂一端由舵机驱动、另一端连接朝向所述柔性垫块侧壁的辅助爪,所述舵机用于驱动对应的辅助爪做靠近和远离柔性垫块的运动。本发明用以解决现有技术中无人机携带货物量少,货物投放、降落精度较低等问题,实现提高货物携带量,提高后端作业精度的目的。

一种无人机投放装置及其控制方法.pdf
本发明提供一种无人机投放装置及其控制方法。本发明包括箱体,箱体与无人机本体的飞控系统通信连接,箱门连接有转动机构,转动机构包括第一连杆、第二连杆和舵机,第一连杆与箱门连接,第二连杆两端分别与第一连杆和舵机连接;与箱门相对的箱体另一侧设有推板,推板上固设有伺服电机和齿轮,该两端间设有导轨,推板在伺服电机和齿轮齿条的带动下可沿导轨来回运动,箱体的底部设有压力传感器和支撑弹簧。本发明的转动机构,控制箱门开闭,同时在箱体底部安装压力传感器,通过重量检测及对比来判断当前包裹是否已经投递成功,并设计齿轮齿条的移动带动
一种垃圾投放系统及其投放方法.pdf
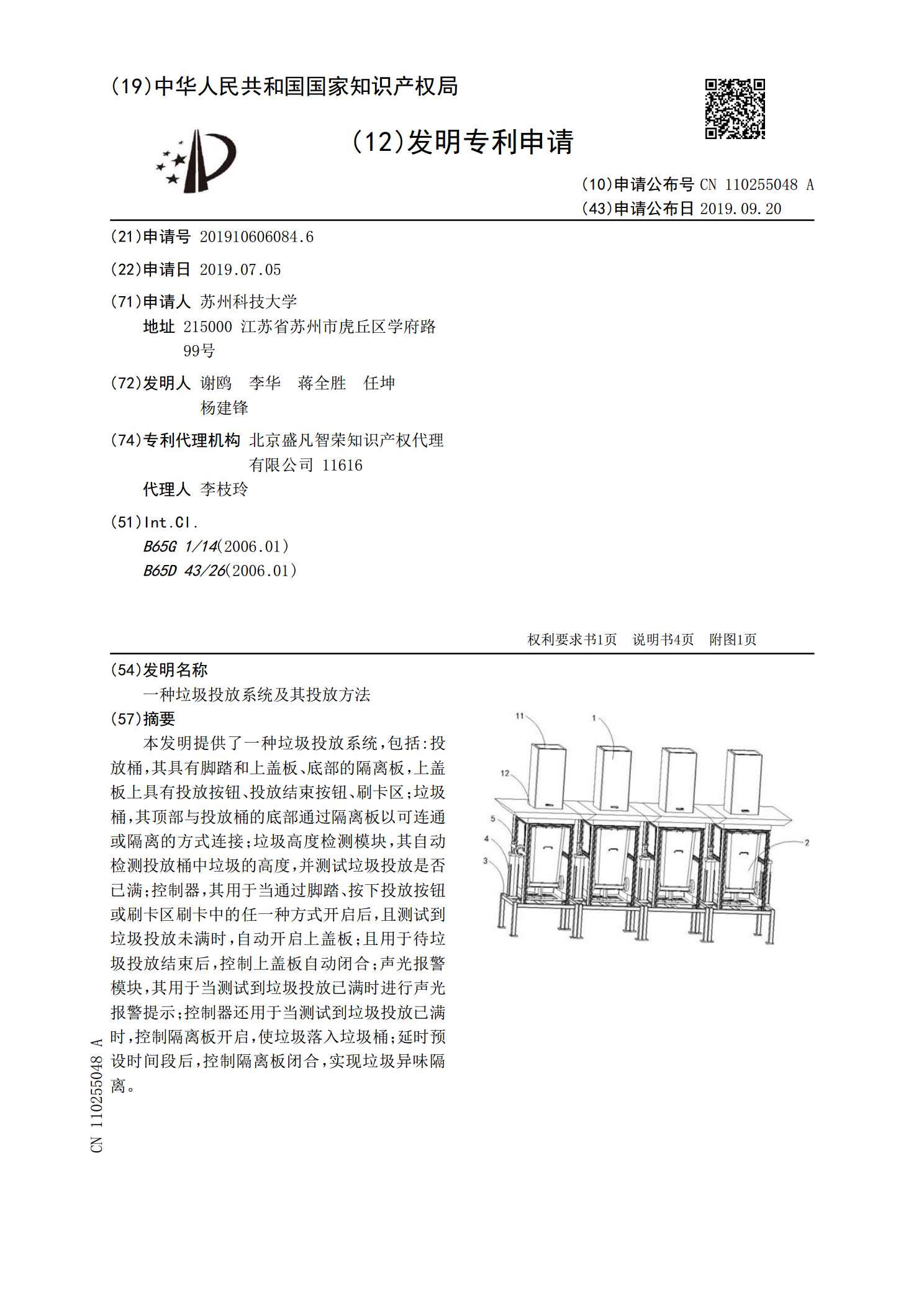
本发明提供了一种垃圾投放系统,包括:投放桶,其具有脚踏和上盖板、底部的隔离板,上盖板上具有投放按钮、投放结束按钮、刷卡区;垃圾桶,其顶部与投放桶的底部通过隔离板以可连通或隔离的方式连接;垃圾高度检测模块,其自动检测投放桶中垃圾的高度,并测试垃圾投放是否已满;控制器,其用于当通过脚踏、按下投放按钮或刷卡区刷卡中的任一种方式开启后,且测试到垃圾投放未满时,自动开启上盖板;且用于待垃圾投放结束后,控制上盖板自动闭合;声光报警模块,其用于当测试到垃圾投放已满时进行声光报警提示;控制器还用于当测试到垃圾投放已满时,
一种双余度无人机吊挂投放装置及其工作方法.pdf
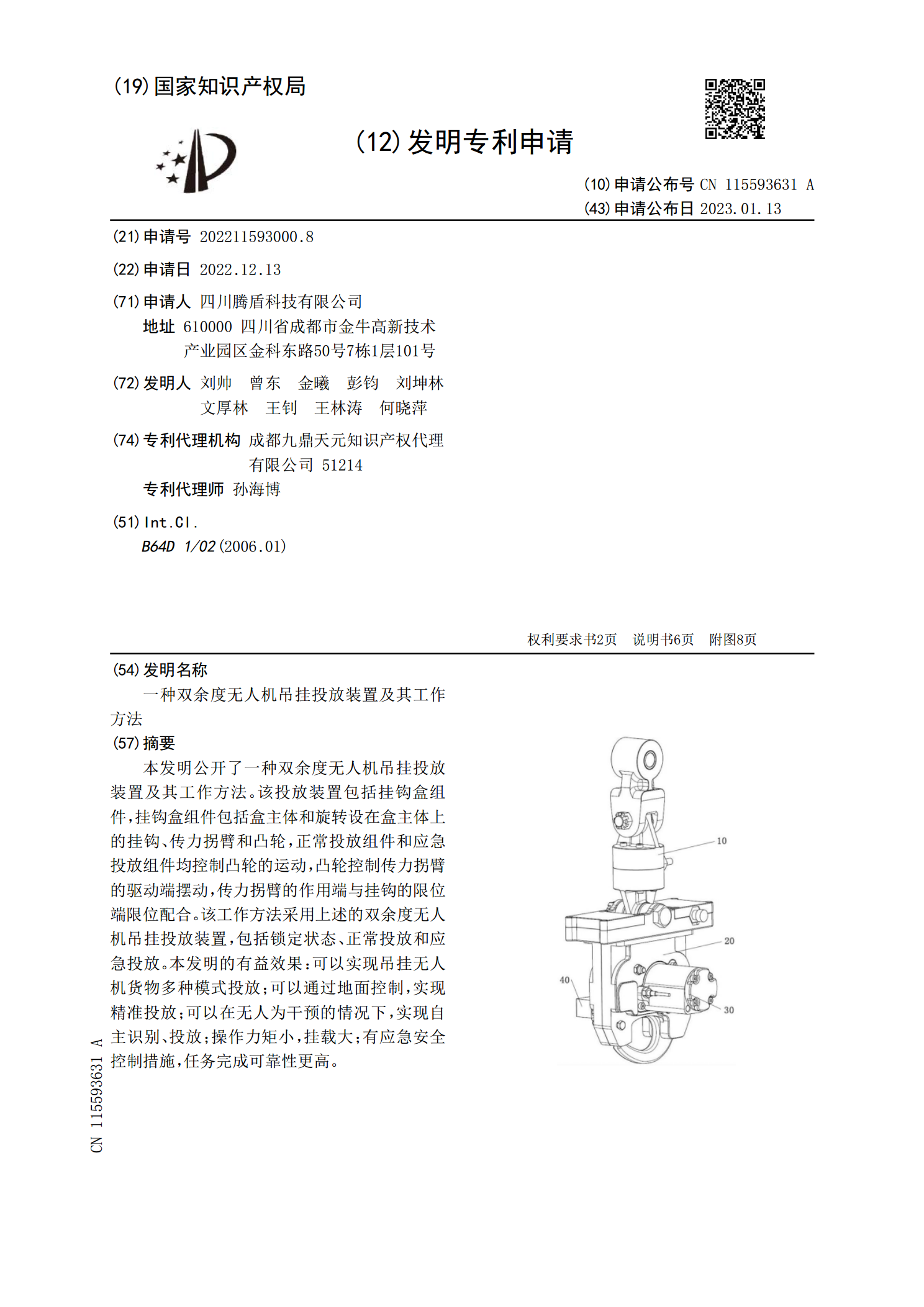
本发明公开了一种双余度无人机吊挂投放装置及其工作方法。该投放装置包括挂钩盒组件,挂钩盒组件包括盒主体和旋转设在盒主体上的挂钩、传力拐臂和凸轮,正常投放组件和应急投放组件均控制凸轮的运动,凸轮控制传力拐臂的驱动端摆动,传力拐臂的作用端与挂钩的限位端限位配合。该工作方法采用上述的双余度无人机吊挂投放装置,包括锁定状态、正常投放和应急投放。本发明的有益效果:可以实现吊挂无人机货物多种模式投放;可以通过地面控制,实现精准投放;可以在无人为干预的情况下,实现自主识别、投放;操作力矩小,挂载大;有应急安全控制措施,任
一种无人机物流运送货物装置.pdf
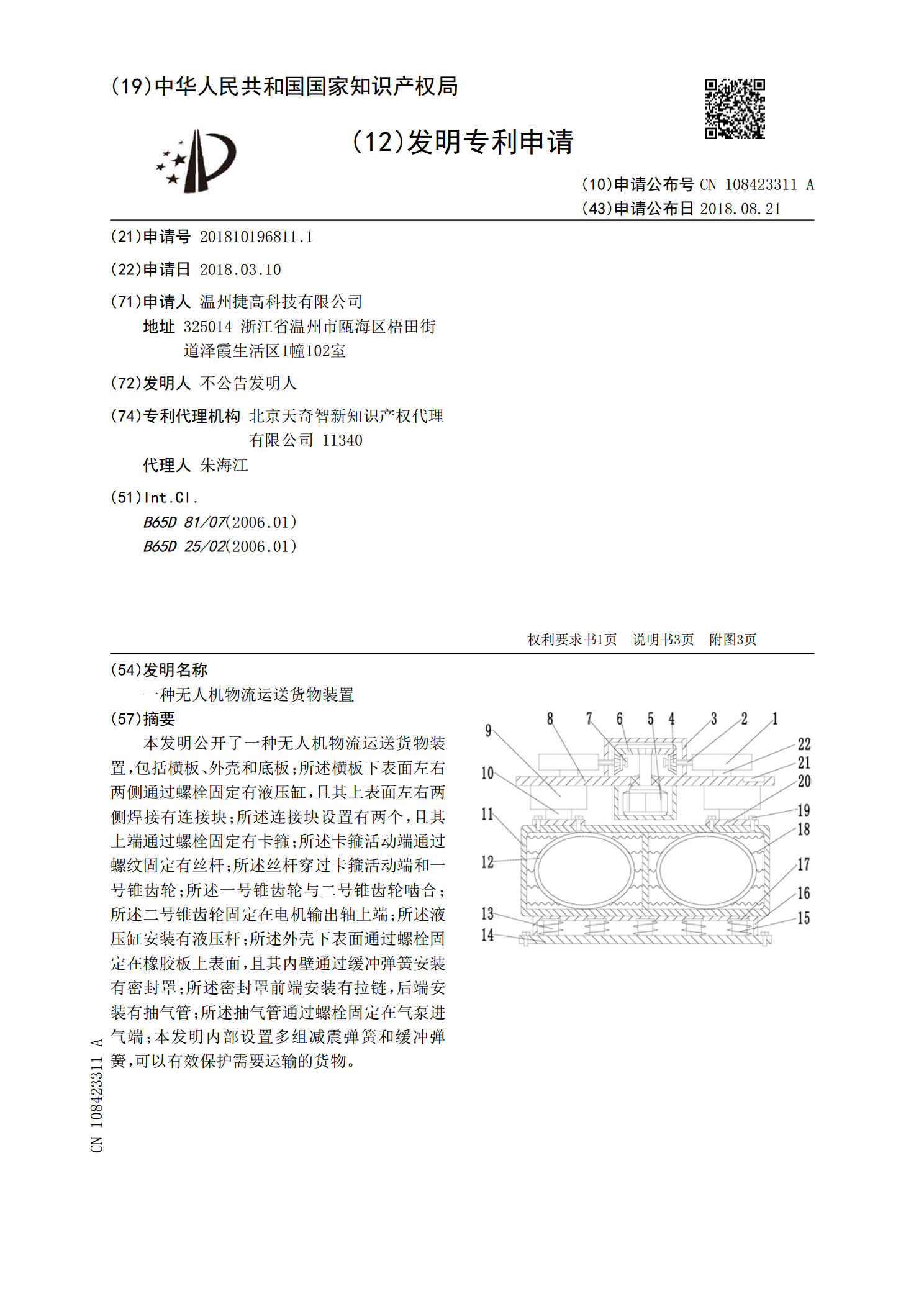
本发明公开了一种无人机物流运送货物装置,包括横板、外壳和底板;所述横板下表面左右两侧通过螺栓固定有液压缸,且其上表面左右两侧焊接有连接块;所述连接块设置有两个,且其上端通过螺栓固定有卡箍;所述卡箍活动端通过螺纹固定有丝杆;所述丝杆穿过卡箍活动端和一号锥齿轮;所述一号锥齿轮与二号锥齿轮啮合;所述二号锥齿轮固定在电机输出轴上端;所述液压缸安装有液压杆;所述外壳下表面通过螺栓固定在橡胶板上表面,且其内壁通过缓冲弹簧安装有密封罩;所述密封罩前端安装有拉链,后端安装有抽气管;所述抽气管通过螺栓固定在气泵进气端;本发