
用于控制线控转向系统的设备和方法.pdf

傲丝****账号


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制线控转向系统的设备和方法.pdf
本公开涉及一种用于控制线控转向系统的设备和方法。一个实施例涉及一种用于控制线控转向系统的设备和方法,该设备包括:接收器,从配置在车辆内部的传感器接收齿条传动电机角速度信息、齿条位置信息和齿条轴向力信息;滞后发生确定器,基于齿条传动电机角速度信息、齿条位置信息或用于根据驾驶员转向调整车轮的定向齿条位置信息中的至少一个来确定发生/不发生由于反电动势引起的齿条传动电机的输出小于定向值的滞后;滞后转矩确定器,如果确定在齿条传动电机中已经发生滞后则基于齿条位置信息和定向齿条位置信息确定由于齿条传动电机中的反电动势而

用于控制线控转向系统的设备和方法.pdf
用于控制线控转向系统的设备和方法,可以包括:反作用转矩生成器,被配置为生成作为施加到方向盘的转向反作用转矩的计算值的反作用转矩;驾驶员转矩估计器,被配置为检测作为驾驶员转向转矩的估计值的驾驶员转矩估计值;速度控制器,被配置为生成电机驱动的动力转向系统的电机转矩指令值;转矩调节器,被配置为基于所述驾驶员转矩估计值来校准所述电机转矩指令值和所述反作用转矩,并输出最终主动复位转矩和最终反作用转矩;以及目标电流生成器,被配置为通过使用从所述转矩调节器输入的所述最终主动复位转矩和所述最终反作用转矩来生成用于电机控制

控制线控转向的转向系统的方法和用于机动车辆的线控转向的转向系统.pdf
本发明涉及控制用于机动车辆的线控转向的转向系统(1)的方法,线控转向的转向系统(1)包括:可电控转向控制器(2),可电控转向控制器(2)作用于转向轮并且检测转向轮的实际转向角(α);反馈致动器,反馈致动器检测利用方向盘设置的目标转向角(β);以及致动单元(4),致动单元(4)根据目标转向角(β)和实际转向角(α)、使用受限扭矩请求信号(PT
用于线控转向系统的转向控制方法和装置.pdf
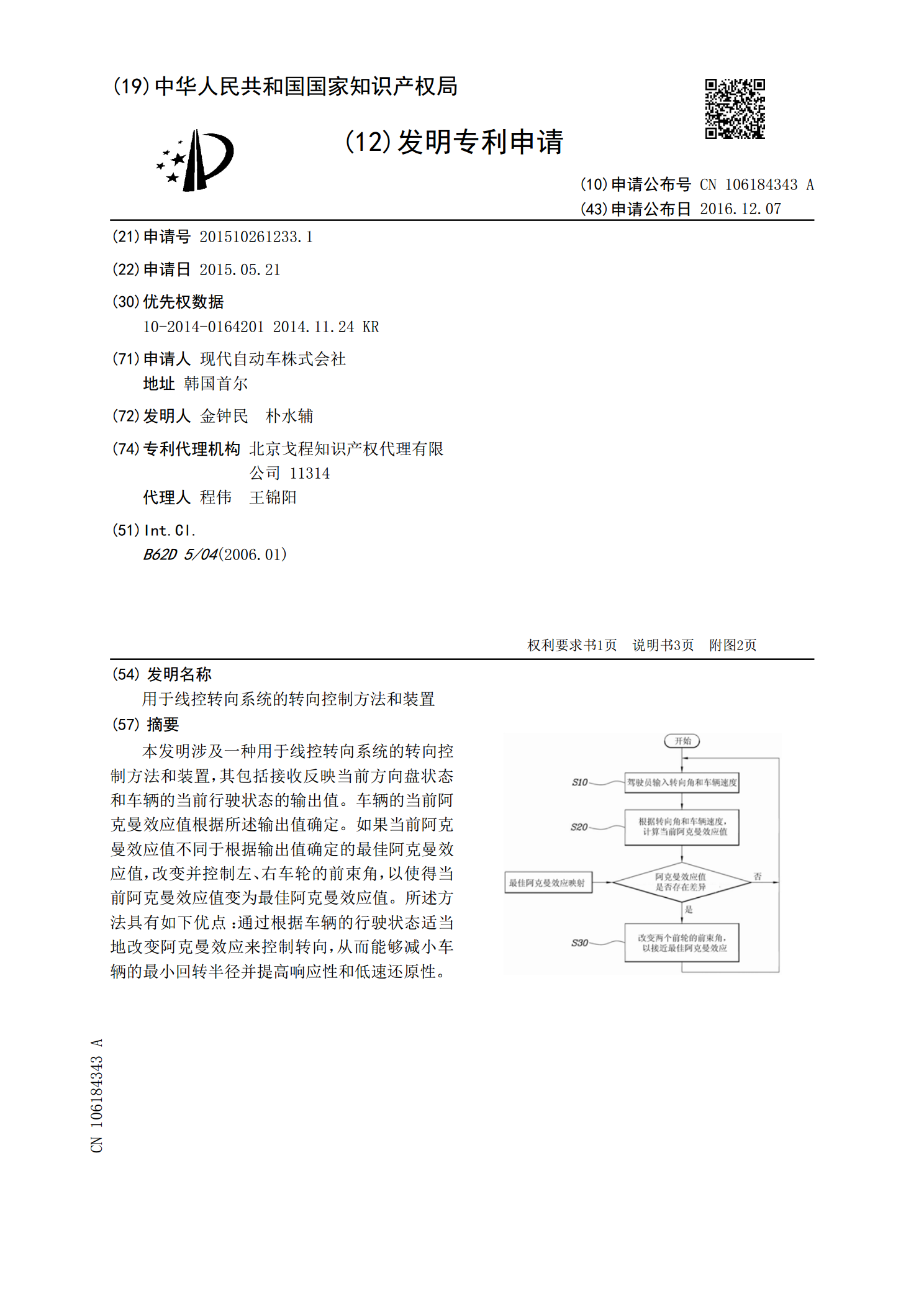
本发明涉及一种用于线控转向系统的转向控制方法和装置,其包括接收反映当前方向盘状态和车辆的当前行驶状态的输出值。车辆的当前阿克曼效应值根据所述输出值确定。如果当前阿克曼效应值不同于根据输出值确定的最佳阿克曼效应值,改变并控制左、右车轮的前束角,以使得当前阿克曼效应值变为最佳阿克曼效应值。所述方法具有如下优点:通过根据车辆的行驶状态适当地改变阿克曼效应来控制转向,从而能够减小车辆的最小回转半径并提高响应性和低速还原性。
控制线控转向型转向系统.pdf
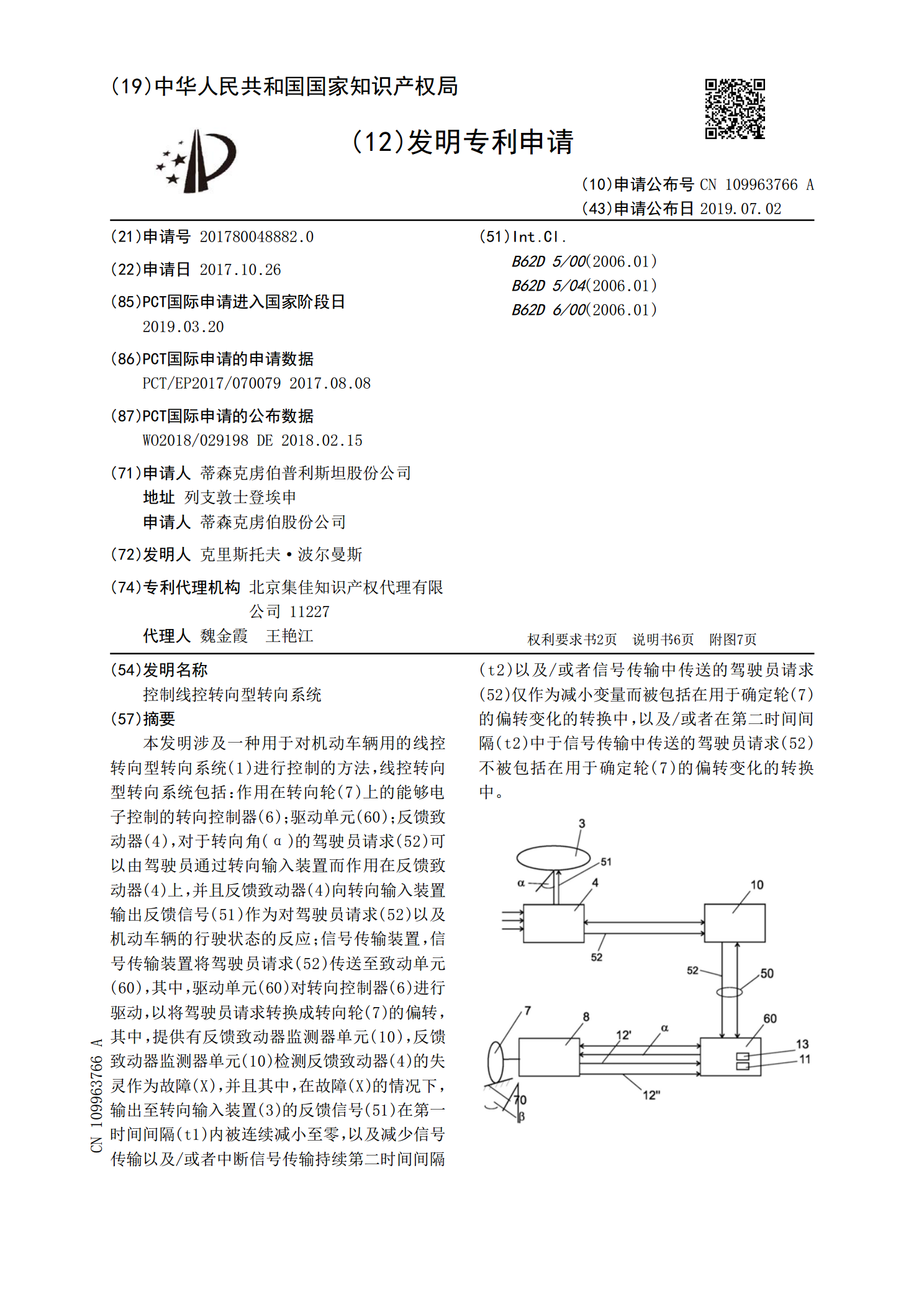
本发明涉及一种用于对机动车辆用的线控转向型转向系统(1)进行控制的方法,线控转向型转向系统包括:作用在转向轮(7)上的能够电子控制的转向控制器(6);驱动单元(60);反馈致动器(4),对于转向角(α)的驾驶员请求(52)可以由驾驶员通过转向输入装置而作用在反馈致动器(4)上,并且反馈致动器(4)向转向输入装置输出反馈信号(51)作为对驾驶员请求(52)以及机动车辆的行驶状态的反应;信号传输装置,信号传输装置将驾驶员请求(52)传送至致动单元(60),其中,驱动单元(60)对转向控制器(6)进行驱动,以将