
一种自动驾驶车辆避障方法、装置及设备.pdf

慧颖****23

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动驾驶车辆避障方法、装置及设备.pdf
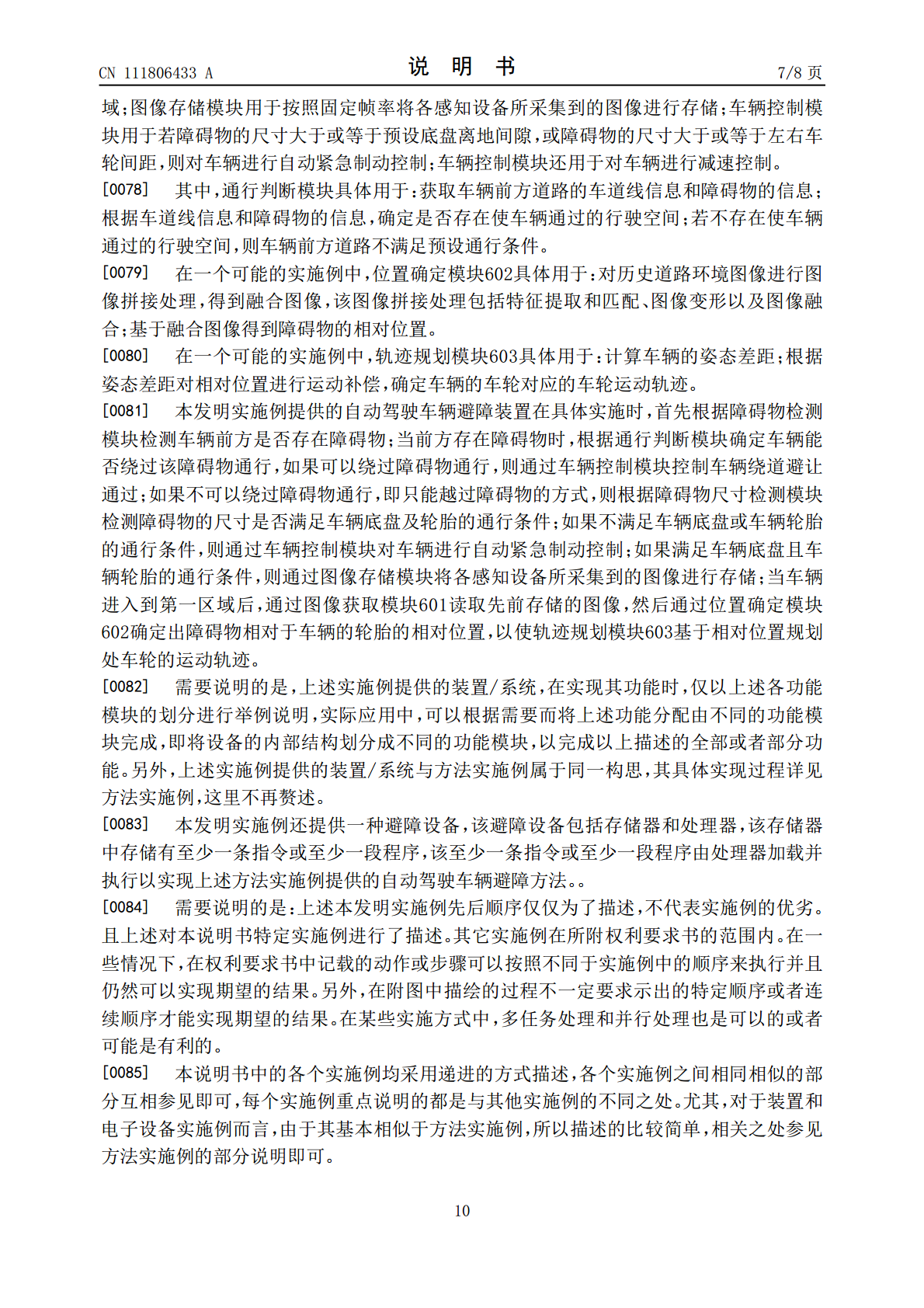
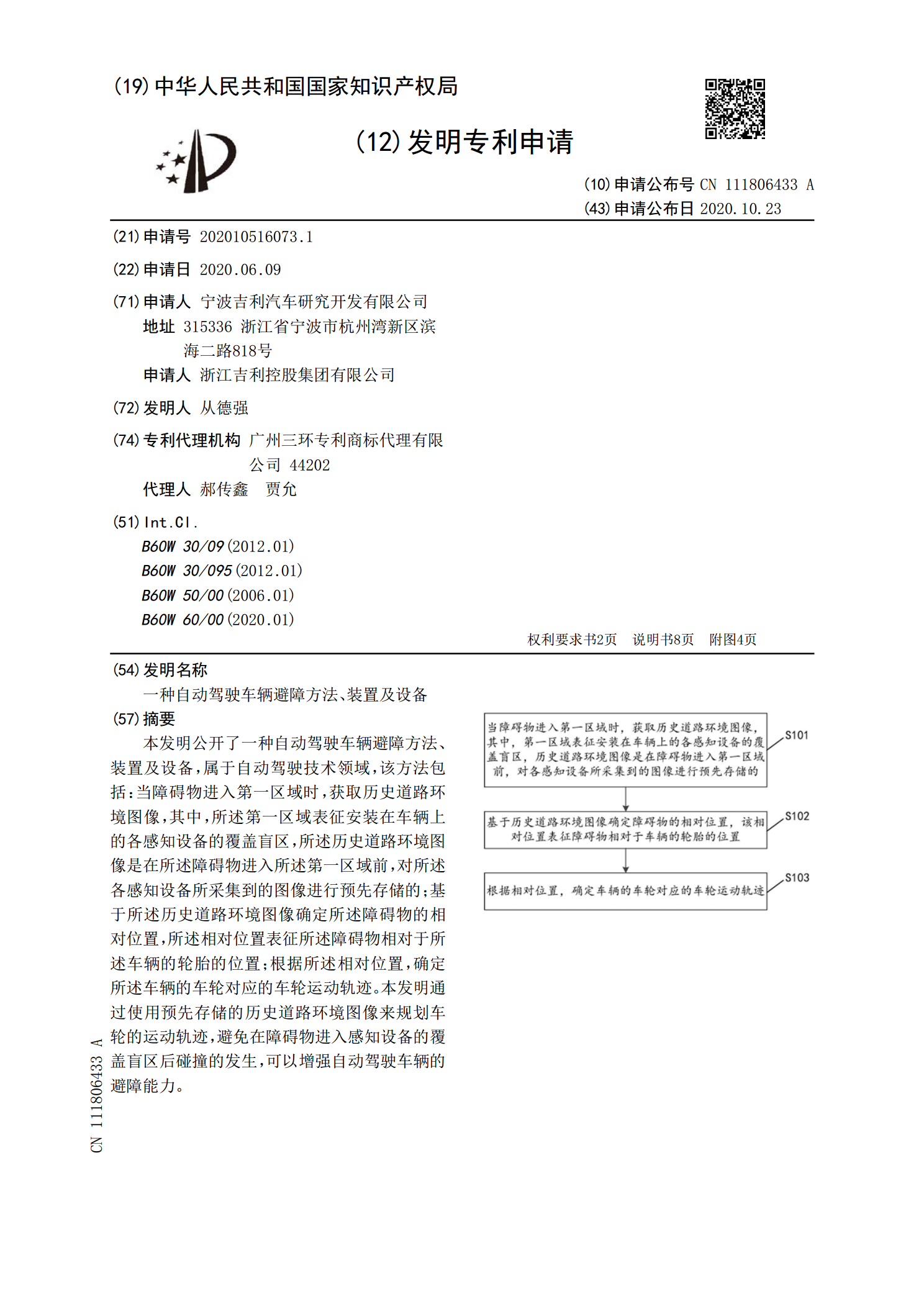
本发明公开了一种自动驾驶车辆避障方法、装置及设备,属于自动驾驶技术领域,该方法包括:当障碍物进入第一区域时,获取历史道路环境图像,其中,所述第一区域表征安装在车辆上的各感知设备的覆盖盲区,所述历史道路环境图像是在所述障碍物进入所述第一区域前,对所述各感知设备所采集到的图像进行预先存储的;基于所述历史道路环境图像确定所述障碍物的相对位置,所述相对位置表征所述障碍物相对于所述车辆的轮胎的位置;根据所述相对位置,确定所述车辆的车轮对应的车轮运动轨迹。本发明通过使用预先存储的历史道路环境图像来规划车轮的运动轨迹,

车辆侧向避障方法、装置、设备及车辆.pdf
本发明实施例公开了一种车辆侧向避障方法、装置、设备及车辆。包括:基于全局坐标系构建障碍物地图;所述障碍物地图为网格化地图;根据车辆侧面的超声波雷达采集的数据确定第一障碍物信息;将所述第一障碍物信息转化至所述障碍物地图中,获得第二障碍物信息;根据车辆的运行信息更新所述第二障碍物信息;根据更新后所述第二障碍物信息产生提醒信息,以提醒驾驶员侧方的障碍物。本发明实施例公开的车辆侧向避障方法,根据车辆的运行信息更新第二障碍物信息,使得驾驶员可以获取到超声波雷达盲区内的障碍物信息,从而进行避障,提高车辆行驶的安全性。
一种基于自动驾驶的避障方法和装置.pdf
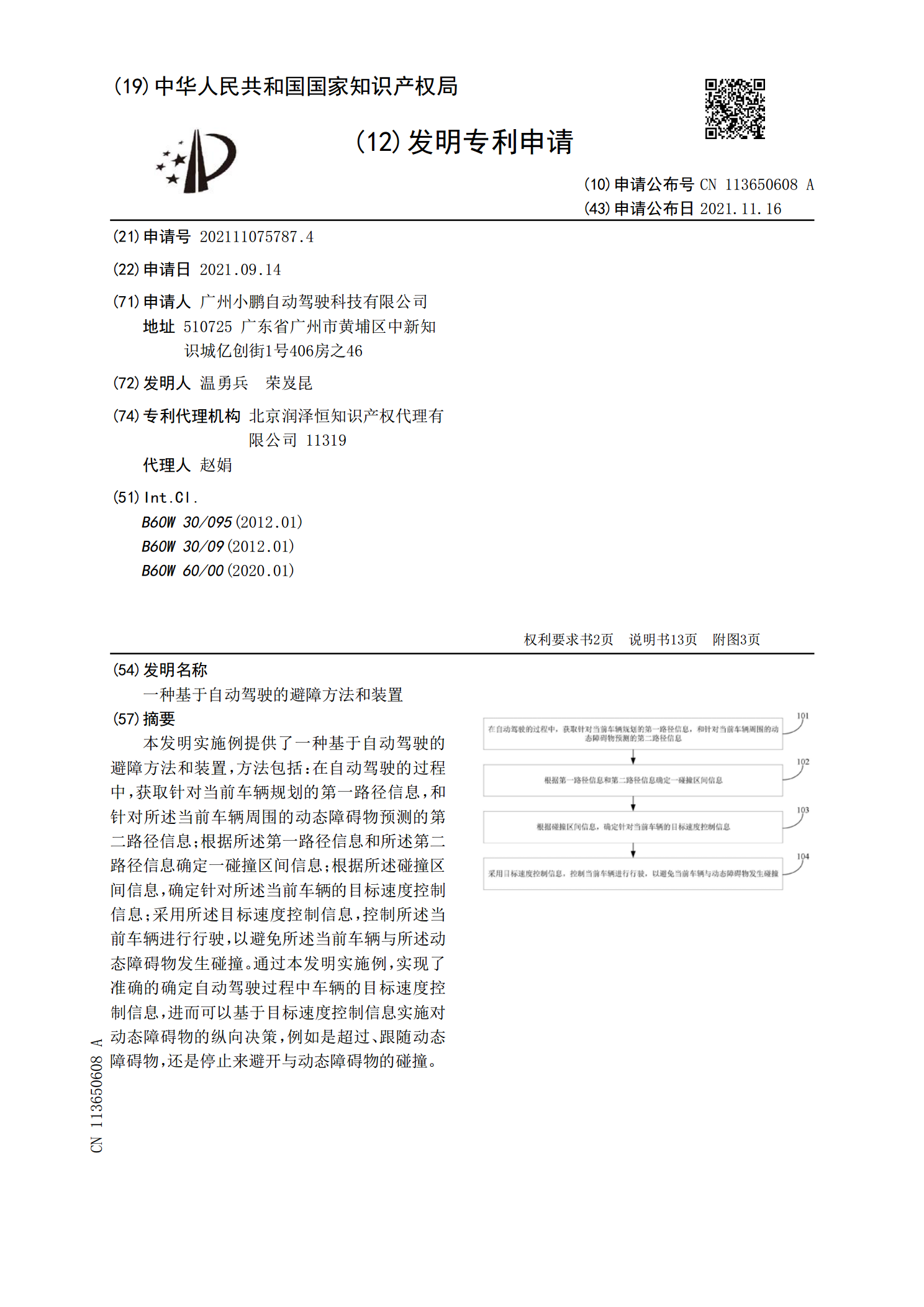
本发明实施例提供了一种基于自动驾驶的避障方法和装置,方法包括:在自动驾驶的过程中,获取针对当前车辆规划的第一路径信息,和针对所述当前车辆周围的动态障碍物预测的第二路径信息;根据所述第一路径信息和所述第二路径信息确定一碰撞区间信息;根据所述碰撞区间信息,确定针对所述当前车辆的目标速度控制信息;采用所述目标速度控制信息,控制所述当前车辆进行行驶,以避免所述当前车辆与所述动态障碍物发生碰撞。通过本发明实施例,实现了准确的确定自动驾驶过程中车辆的目标速度控制信息,进而可以基于目标速度控制信息实施对动态障碍物的纵向
田埂避障控制方法、装置和农用自动驾驶设备.pdf
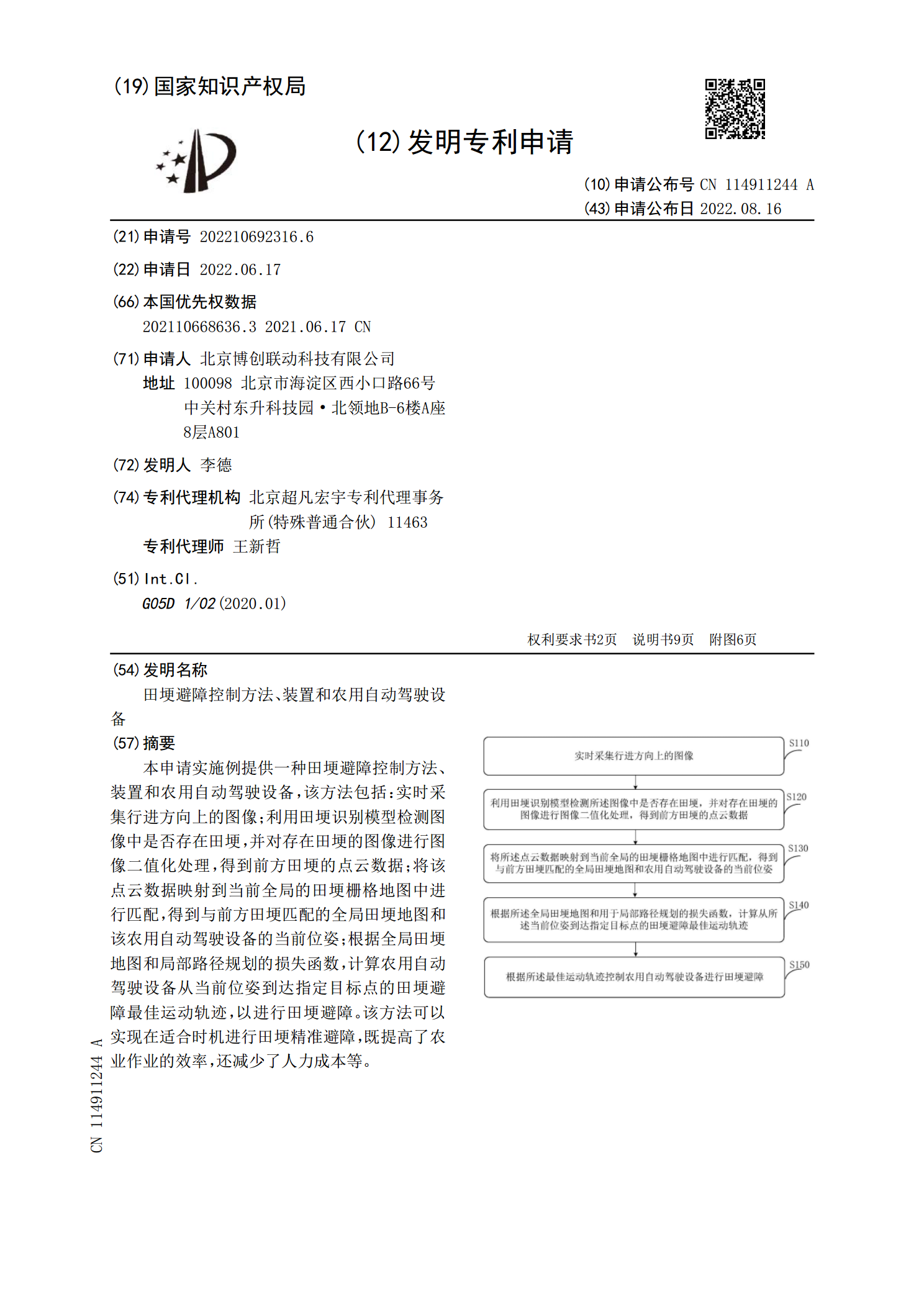
本申请实施例提供一种田埂避障控制方法、装置和农用自动驾驶设备,该方法包括:实时采集行进方向上的图像;利用田埂识别模型检测图像中是否存在田埂,并对存在田埂的图像进行图像二值化处理,得到前方田埂的点云数据;将该点云数据映射到当前全局的田埂栅格地图中进行匹配,得到与前方田埂匹配的全局田埂地图和该农用自动驾驶设备的当前位姿;根据全局田埂地图和局部路径规划的损失函数,计算农用自动驾驶设备从当前位姿到达指定目标点的田埂避障最佳运动轨迹,以进行田埂避障。该方法可以实现在适合时机进行田埂精准避障,既提高了农业作业的效率,
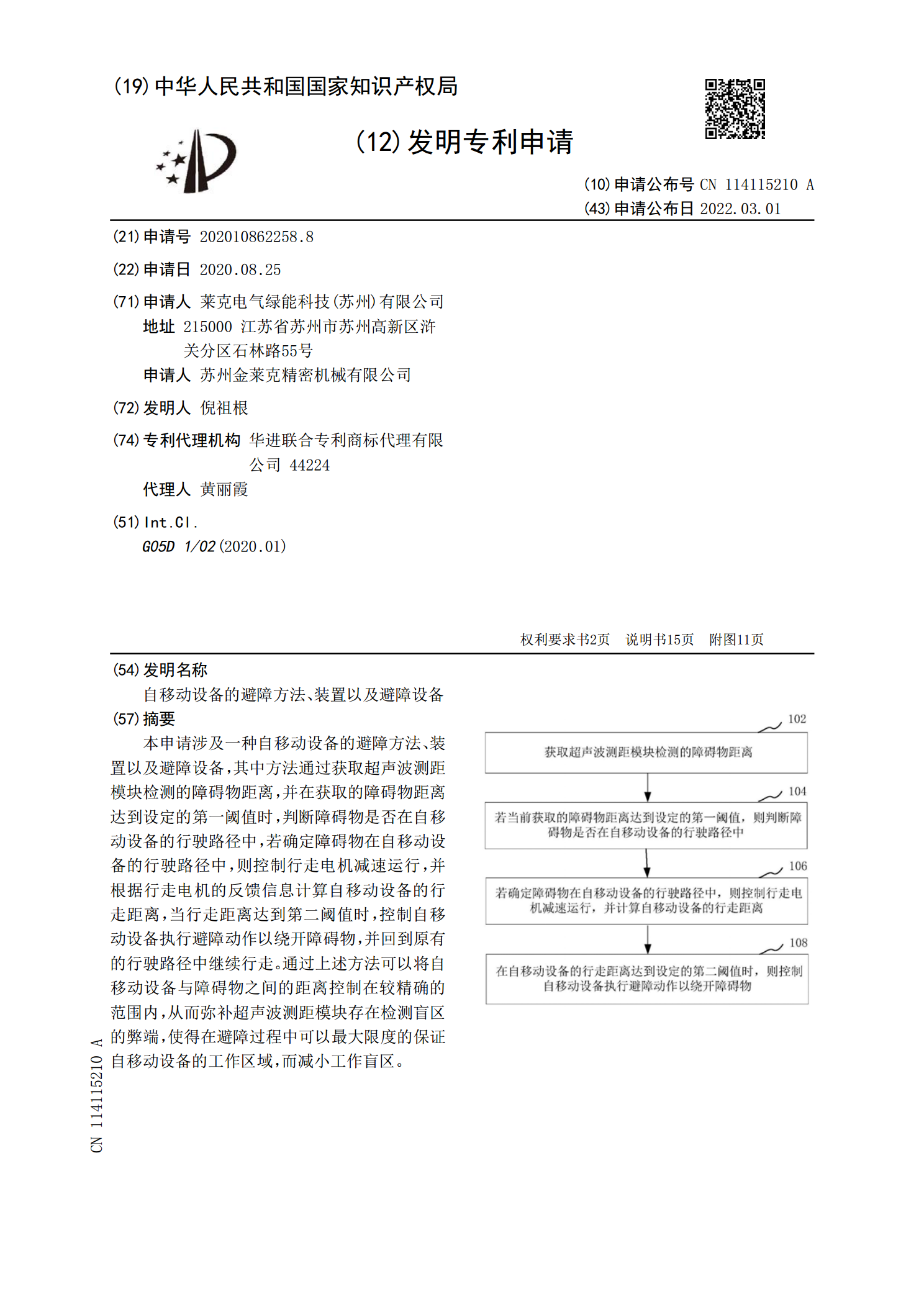
自移动设备的避障方法、装置以及避障设备.pdf
本申请涉及一种自移动设备的避障方法、装置以及避障设备,其中方法通过获取超声波测距模块检测的障碍物距离,并在获取的障碍物距离达到设定的第一阈值时,判断障碍物是否在自移动设备的行驶路径中,若确定障碍物在自移动设备的行驶路径中,则控制行走电机减速运行,并根据行走电机的反馈信息计算自移动设备的行走距离,当行走距离达到第二阈值时,控制自移动设备执行避障动作以绕开障碍物,并回到原有的行驶路径中继续行走。通过上述方法可以将自移动设备与障碍物之间的距离控制在较精确的范围内,从而弥补超声波测距模块存在检测盲区的弊端,使得在