
泊车控制方法及系统.pdf

一只****生物


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

泊车控制装置与系统以及泊车控制方法.pdf
本发明公开了一种泊车控制装置与系统以及泊车控制方法,以解决现有技术中泊车控制时车辆运行轨迹与设计轨迹之间存在较大误差的问题。本发明的泊车控制装置包括:获取模块,用于获取车辆的起点位置和终点位置;计算模块,用于根据约束条件和所述起点位置和终点位置计算预设车速下的泊车轨迹,其中,所述约束条件包括泊车时车辆最高允许车速、车辆前轮最大转向速度和车辆前轮的最大转角,所述泊车轨迹曲率连续变化,其中包含圆弧以及与圆弧两端连接的曲线,所述圆弧的半径为车辆在前轮到达最大转角时的转弯半径。应用本发明的技术方案,有助于使泊车时

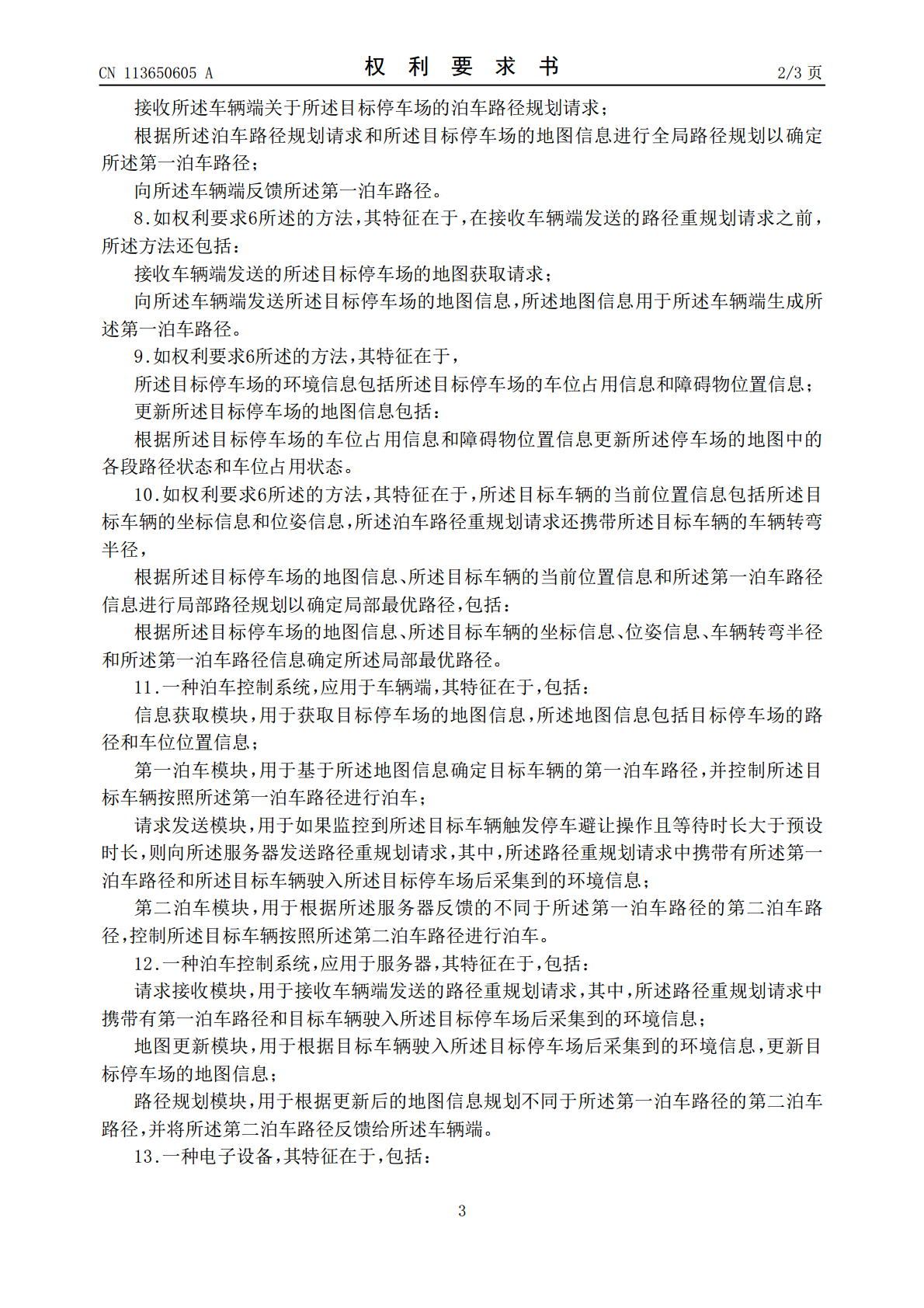
泊车控制方法及系统.pdf
本申请公开了一种泊车控制方法及系统,涉及汽车领域,该方法包括:获取目标停车场的地图信息;基于地图信息确定目标车辆的第一泊车路径,并控制目标车辆按照第一泊车路径进行泊车;如果监控到目标车辆触发停车避让操作且等待时长大于预设时长,则向车辆端的云端服务器发送泊车路径重规划请求;接收云端服务器发送的第二泊车路径并控制目标车辆按照第二泊车路径进行泊车,其中,第二泊车路径是云端服务器基于第一泊车路径、目标车辆的当前位置及存储的目标停车场的地图信息进行局部路径规划得到的。本申请保证了目标车辆即使受到路障阻碍也能够顺利泊
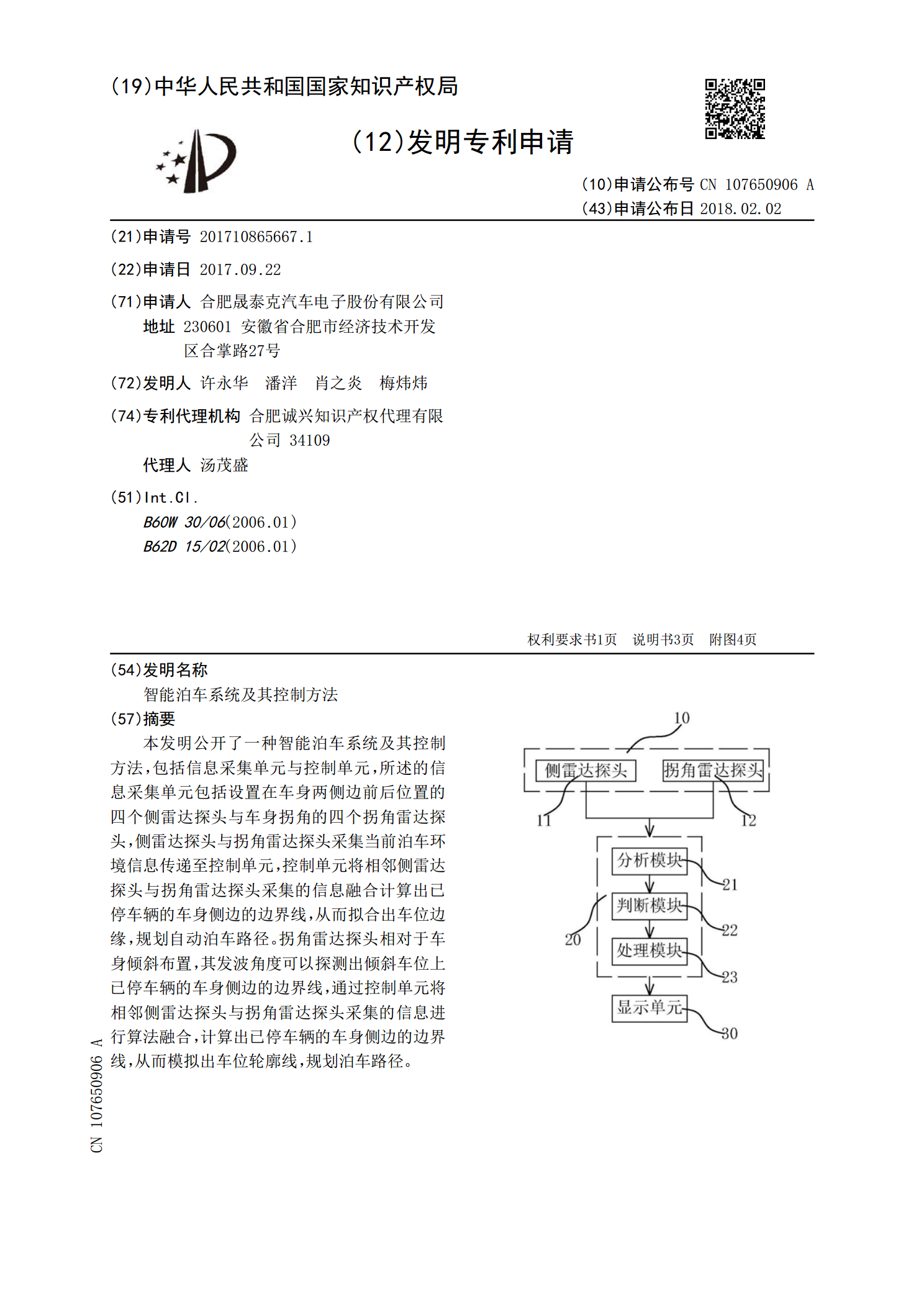
智能泊车系统及其控制方法.pdf
本发明公开了一种智能泊车系统及其控制方法,包括信息采集单元与控制单元,所述的信息采集单元包括设置在车身两侧边前后位置的四个侧雷达探头与车身拐角的四个拐角雷达探头,侧雷达探头与拐角雷达探头采集当前泊车环境信息传递至控制单元,控制单元将相邻侧雷达探头与拐角雷达探头采集的信息融合计算出已停车辆的车身侧边的边界线,从而拟合出车位边缘,规划自动泊车路径。拐角雷达探头相对于车身倾斜布置,其发波角度可以探测出倾斜车位上已停车辆的车身侧边的边界线,通过控制单元将相邻侧雷达探头与拐角雷达探头采集的信息进行算法融合,计算出已

泊车辅助系统及泊车方法.pdf
本发明公开了一种泊车辅助系统及泊车方法。其中,系统包括:通讯模块、图像采集模块和图像处理模块;通讯模块,用于接收车辆发送的短消息集,根据短消息集向图像采集模块发送启动信号;接收图像处理模块传输的处理后的图像,将处理后的图像发送至车辆,以供车辆根据处理后的图像进行泊车;图像采集模块,用于根据启动信号进行车辆驶入车库的图像采集,将图像传输至图像处理模块;图像处理模块,用于对图像进行校正和压缩处理,将处理后的图像传输至通讯模块。本发明实现了实时传输图像,使驾驶员根据传输的图像进行泊车,而且无需进行图像拼接,成本
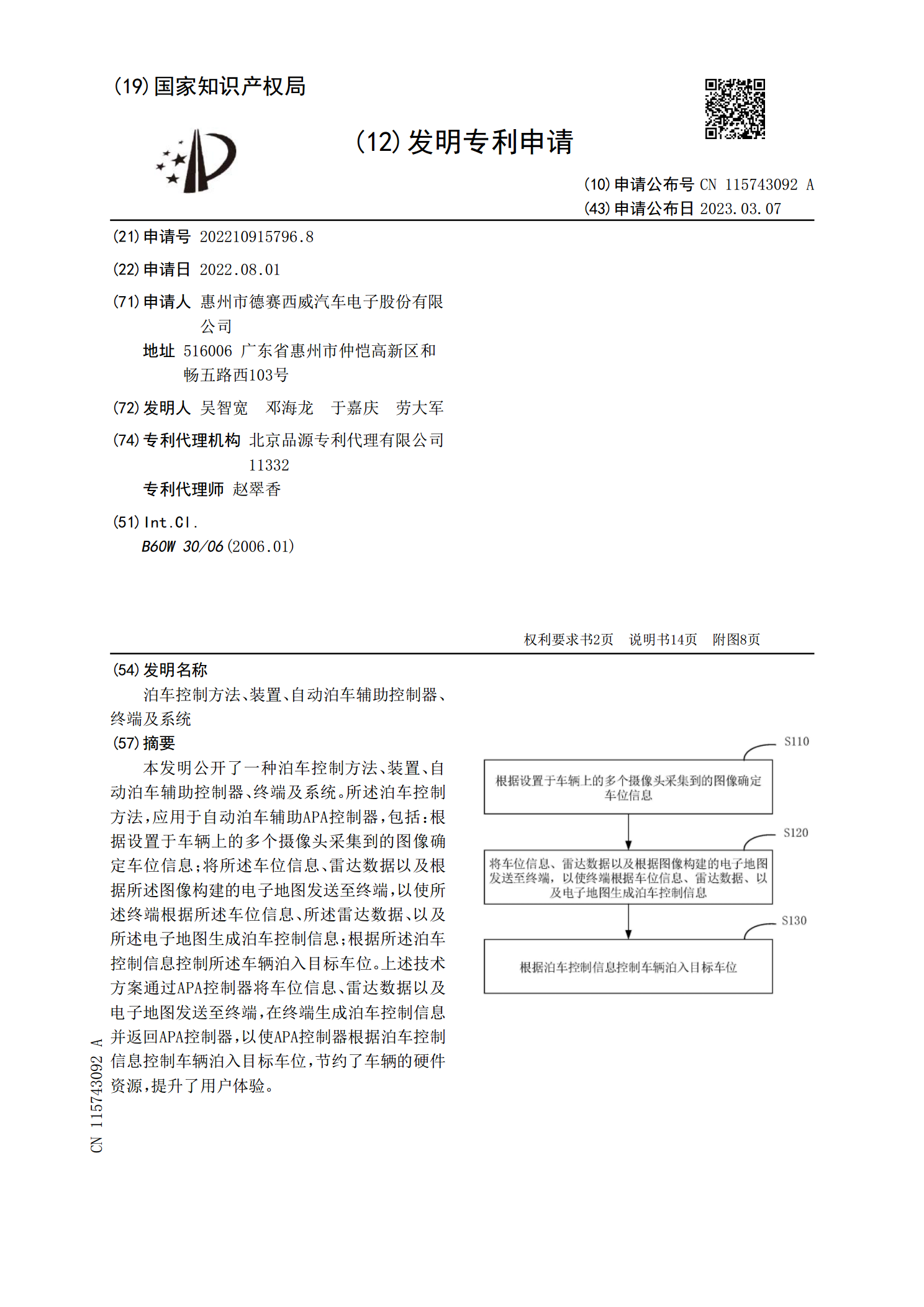
泊车控制方法、装置、自动泊车辅助控制器、终端及系统.pdf
本发明公开了一种泊车控制方法、装置、自动泊车辅助控制器、终端及系统。所述泊车控制方法,应用于自动泊车辅助APA控制器,包括:根据设置于车辆上的多个摄像头采集到的图像确定车位信息;将所述车位信息、雷达数据以及根据所述图像构建的电子地图发送至终端,以使所述终端根据所述车位信息、所述雷达数据、以及所述电子地图生成泊车控制信息;根据所述泊车控制信息控制所述车辆泊入目标车位。上述技术方案通过APA控制器将车位信息、雷达数据以及电子地图发送至终端,在终端生成泊车控制信息并返回APA控制器,以使APA控制器根据泊车控制