
基于位姿图调整的建图方法及相关设备.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于位姿图调整的建图方法及相关设备.pdf
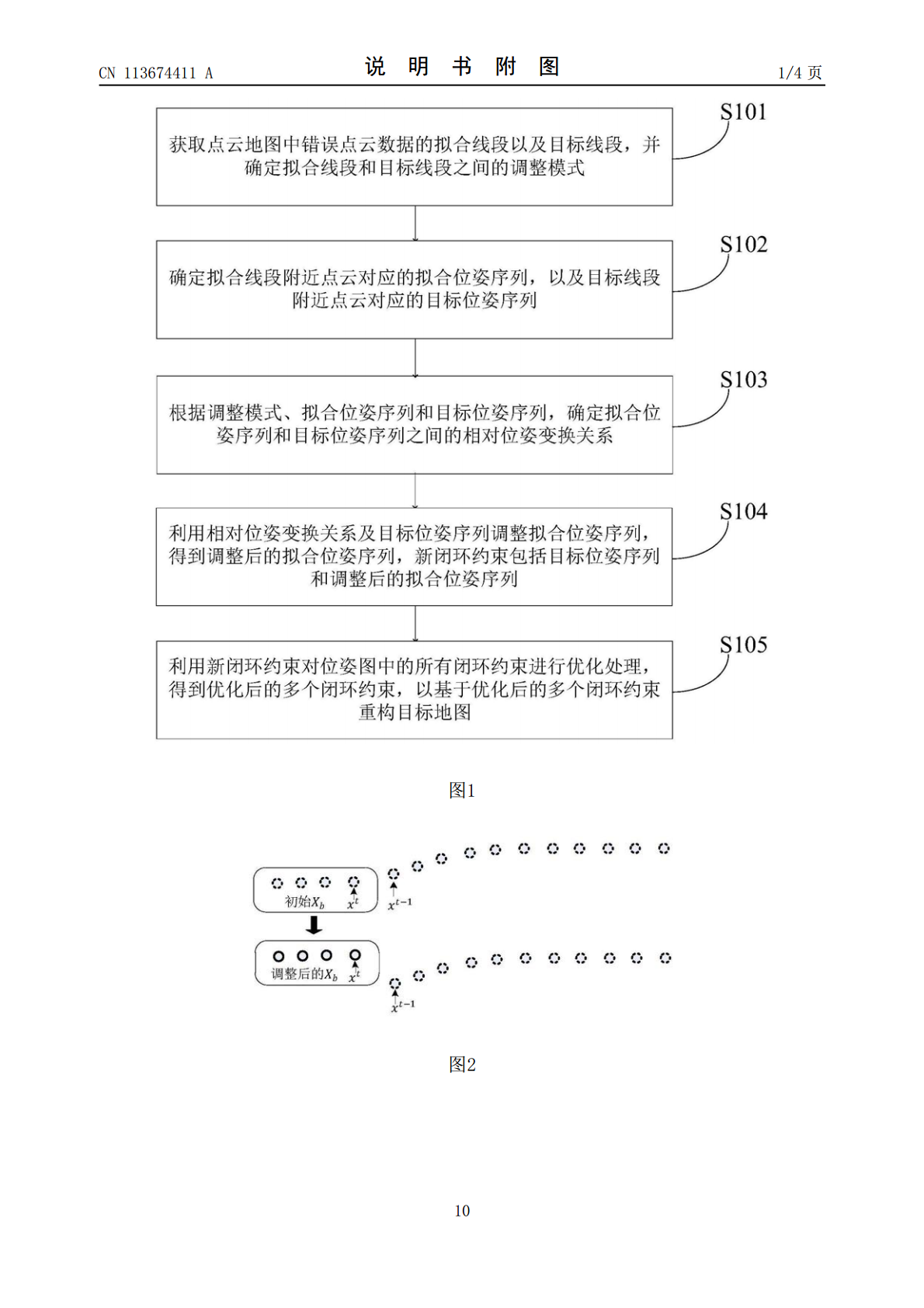
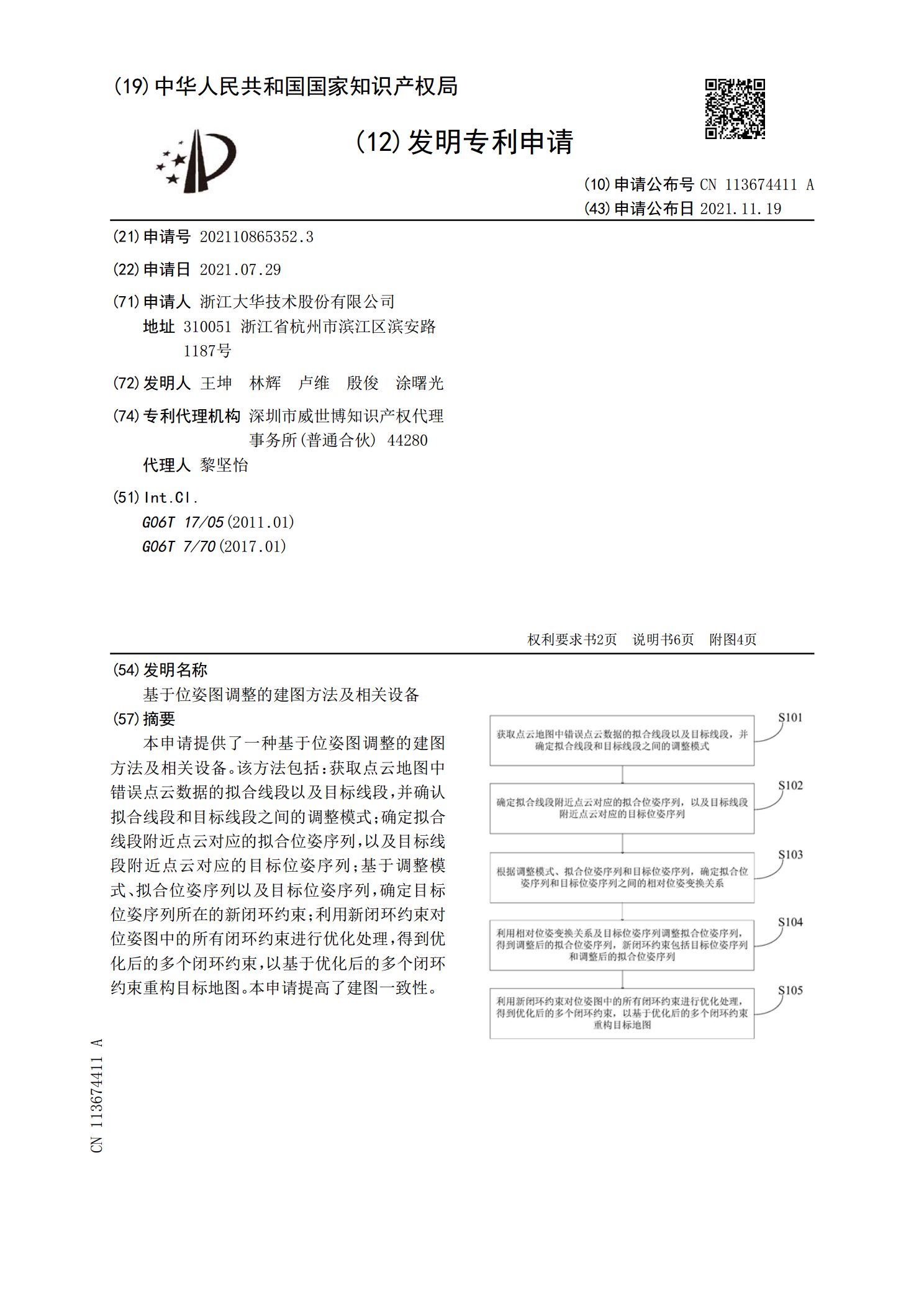
本申请提供了一种基于位姿图调整的建图方法及相关设备。该方法包括:获取点云地图中错误点云数据的拟合线段以及目标线段,并确认拟合线段和目标线段之间的调整模式;确定拟合线段附近点云对应的拟合位姿序列,以及目标线段附近点云对应的目标位姿序列;基于调整模式、拟合位姿序列以及目标位姿序列,确定目标位姿序列所在的新闭环约束;利用新闭环约束对位姿图中的所有闭环约束进行优化处理,得到优化后的多个闭环约束,以基于优化后的多个闭环约束重构目标地图。本申请提高了建图一致性。
基于目标物对接环的对接设备位姿调整方法、系统.pdf
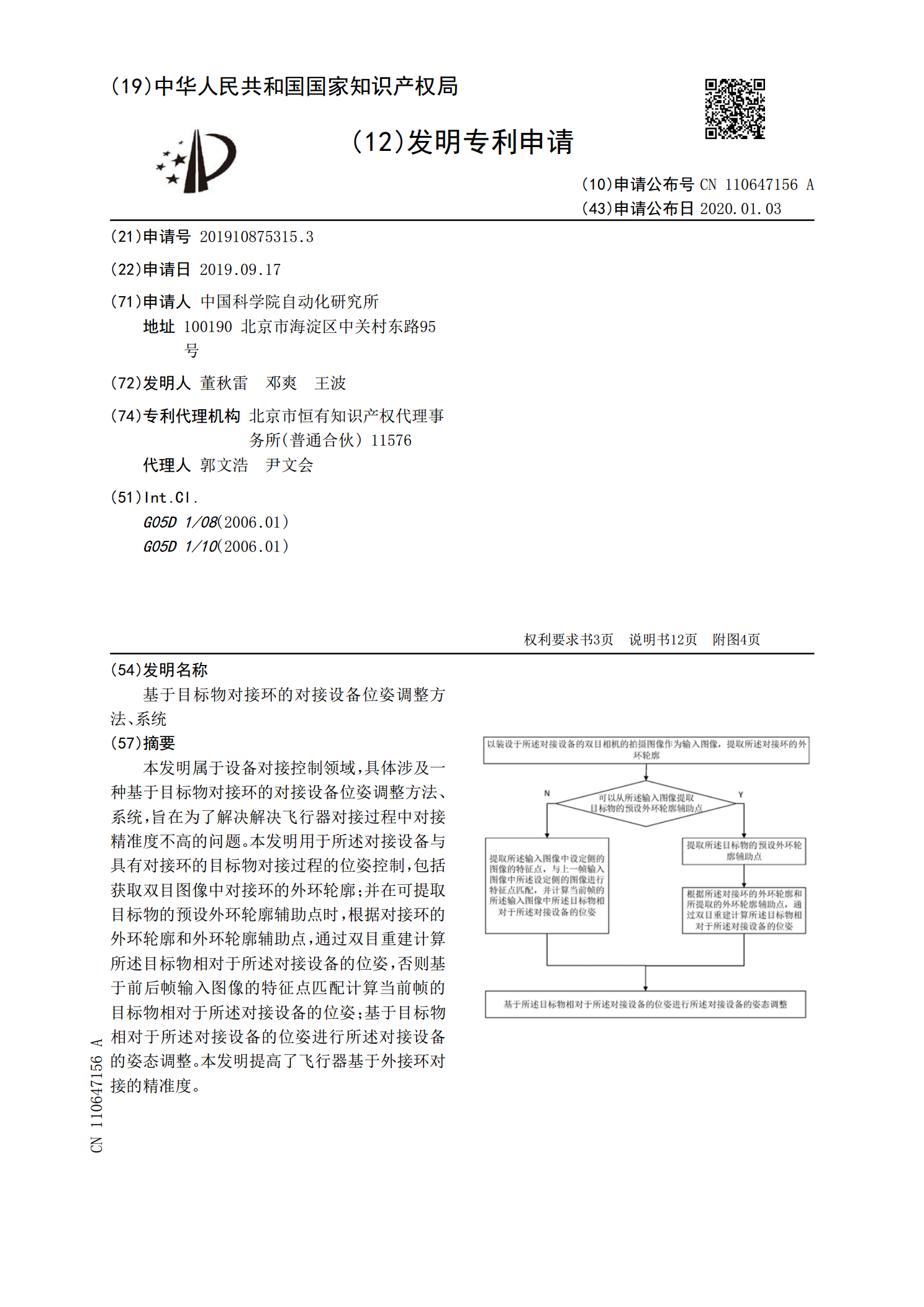
本发明属于设备对接控制领域,具体涉及一种基于目标物对接环的对接设备位姿调整方法、系统,旨在为了解决解决飞行器对接过程中对接精准度不高的问题。本发明用于所述对接设备与具有对接环的目标物对接过程的位姿控制,包括获取双目图像中对接环的外环轮廓;并在可提取目标物的预设外环轮廓辅助点时,根据对接环的外环轮廓和外环轮廓辅助点,通过双目重建计算所述目标物相对于所述对接设备的位姿,否则基于前后帧输入图像的特征点匹配计算当前帧的目标物相对于所述对接设备的位姿;基于目标物相对于所述对接设备的位姿进行所述对接设备的姿态调整。本

一种位姿图的优化方法、装置、设备及介质.pdf
本发明提供一种位姿图的优化方法、装置、设备及介质,用以保留用于优化位姿的闭环信息,丰富位姿图中的信息,控制位姿图的大小,减少位姿图计算资源。所述位姿图的优化方法,包括:接收机器人在预先给定的目标地图中进行自主导航时发生重定位之后的关键帧;在确定所述关键帧与所述目标地图中的任一地图帧闭环时,确定所述关键帧与该地图帧的位姿关系;根据所述关键帧与该地图帧的位姿关系,以及所述关键帧与所述位姿图中目标关键帧的位姿关系,通过空间位姿转换更新所述目标关键帧与该地图帧的位姿关系,所述目标关键帧是最近一次添加至所述位姿图中

一种基于鸟瞰图的位姿确定方法、设备和计算机存储介质.pdf
本发明公开一种基于鸟瞰图的位姿确定方法、设备和计算机存储介质,属于视觉定位技术领域,以解决目前的方法需要语义分割等大量的标注信息,在大规模的场景下代价太大的技术问题。包括以下步骤:获取同一场景的鸟瞰图和原始图像。对鸟瞰图中的运动目标进行掩膜处理,得到掩膜鸟瞰图。利用深度学习网络对掩膜鸟瞰图进行处理,得到第一特征。利用深度位姿估计网络对原始图像进行处理,得到第二特征。将第一特征和第二特征进行融合,得到场景位姿。
一种基于定位器的大型结构部件位姿调整方法.pdf
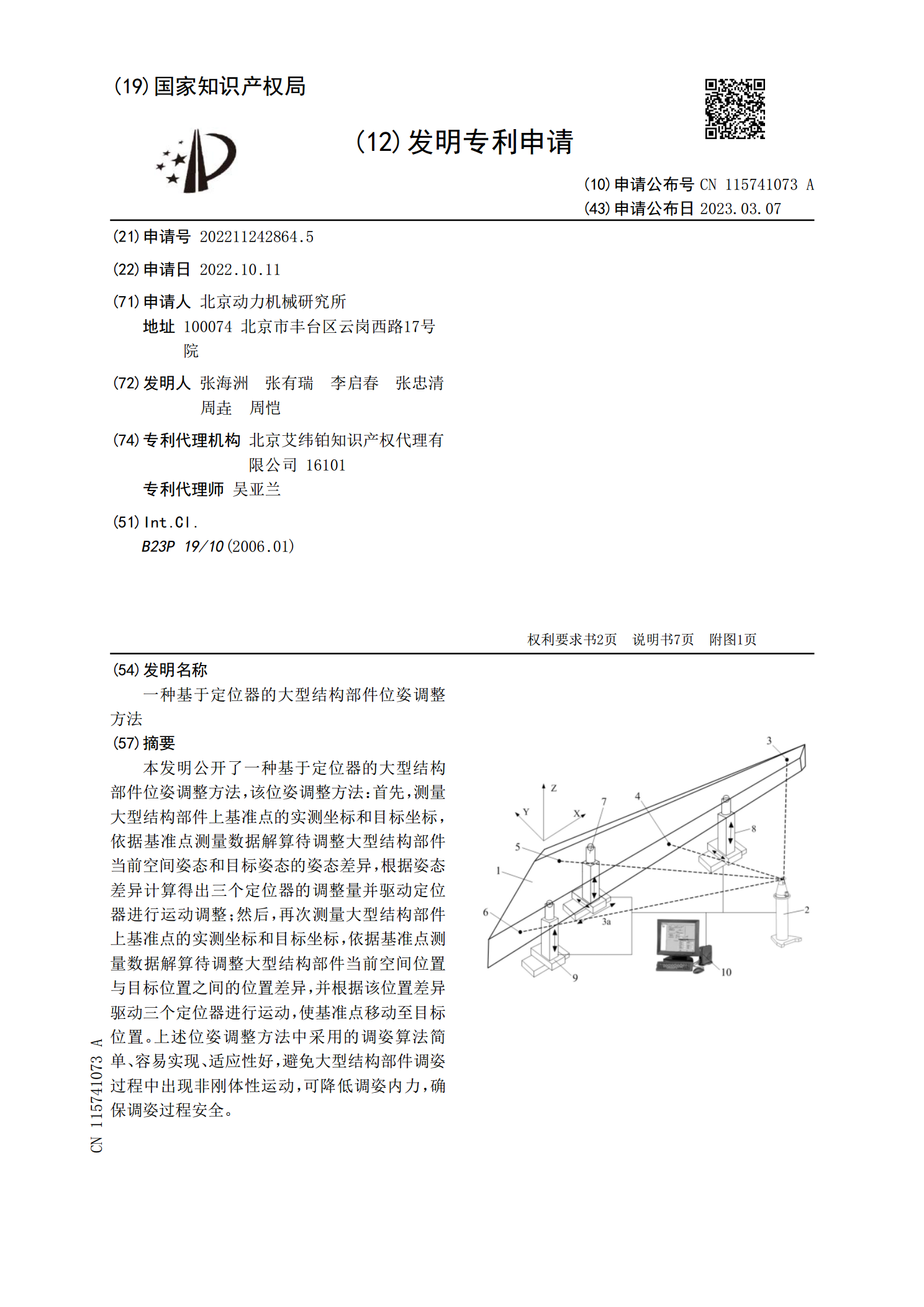
本发明公开了一种基于定位器的大型结构部件位姿调整方法,该位姿调整方法:首先,测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间姿态和目标姿态的姿态差异,根据姿态差异计算得出三个定位器的调整量并驱动定位器进行运动调整;然后,再次测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间位置与目标位置之间的位置差异,并根据该位置差异驱动三个定位器进行运动,使基准点移动至目标位置。上述位姿调整方法中采用的调姿算法简单、容易实现、适应