
一种基于鸟瞰图的位姿确定方法、设备和计算机存储介质.pdf

安双****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于鸟瞰图的位姿确定方法、设备和计算机存储介质.pdf
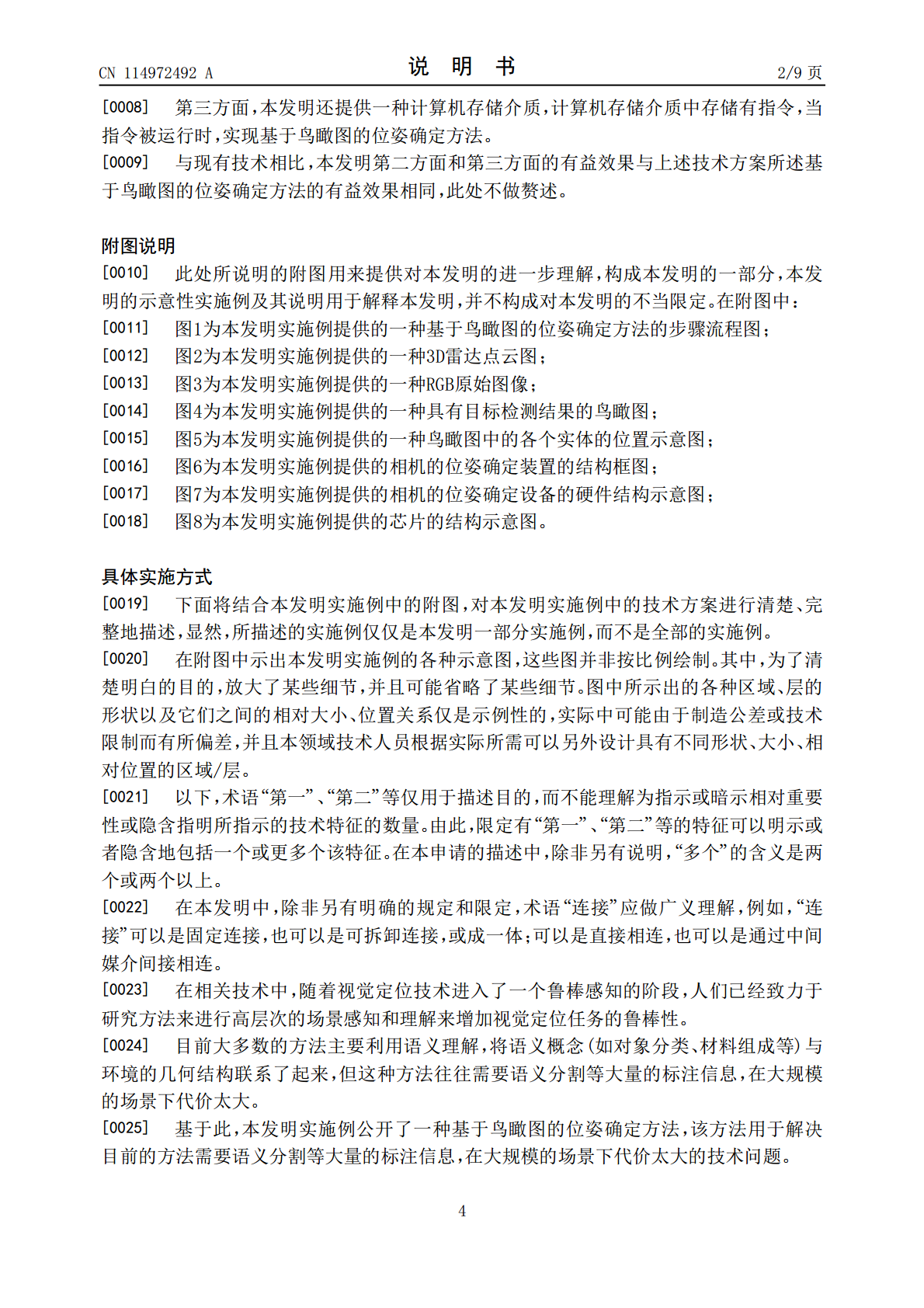
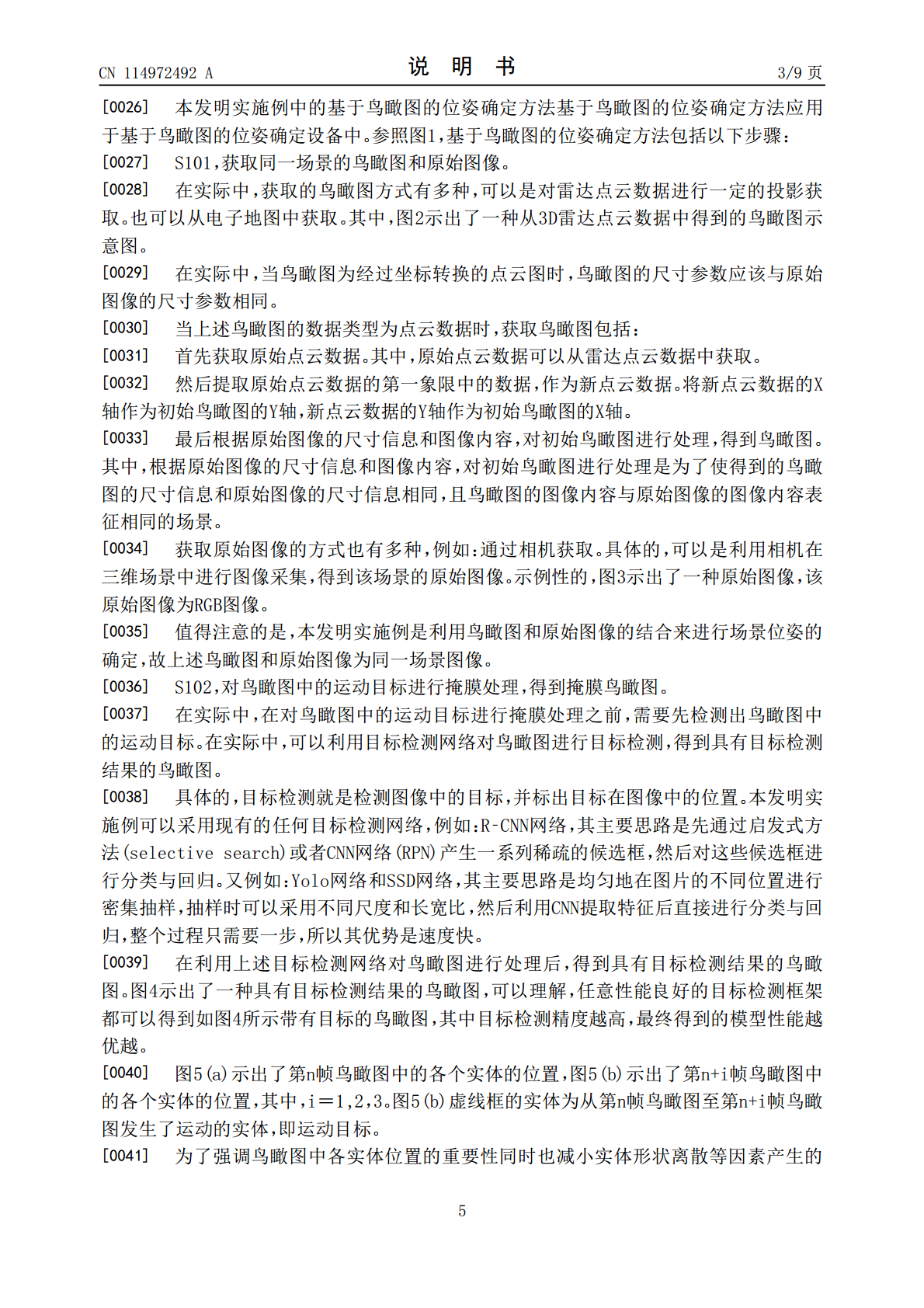
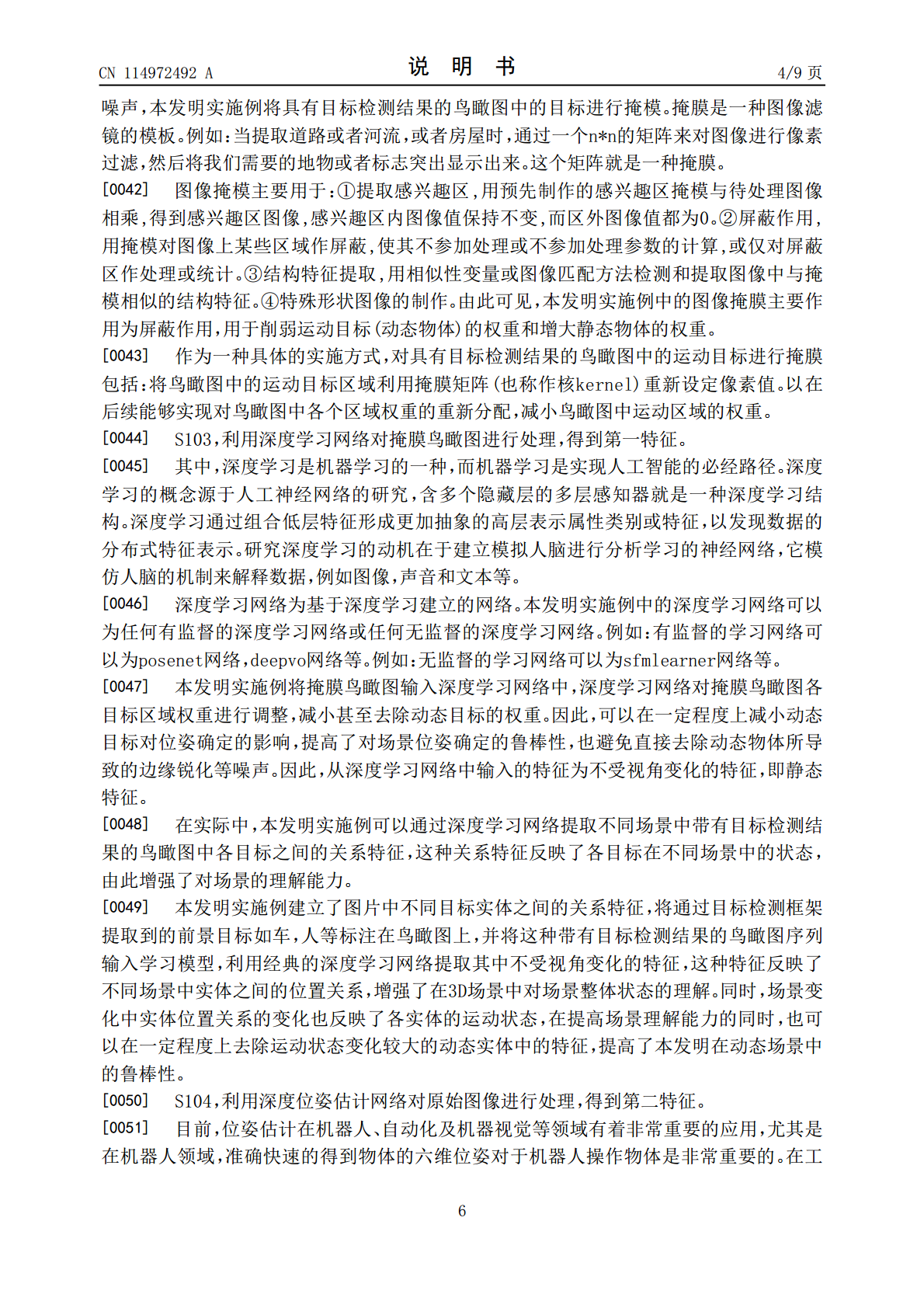
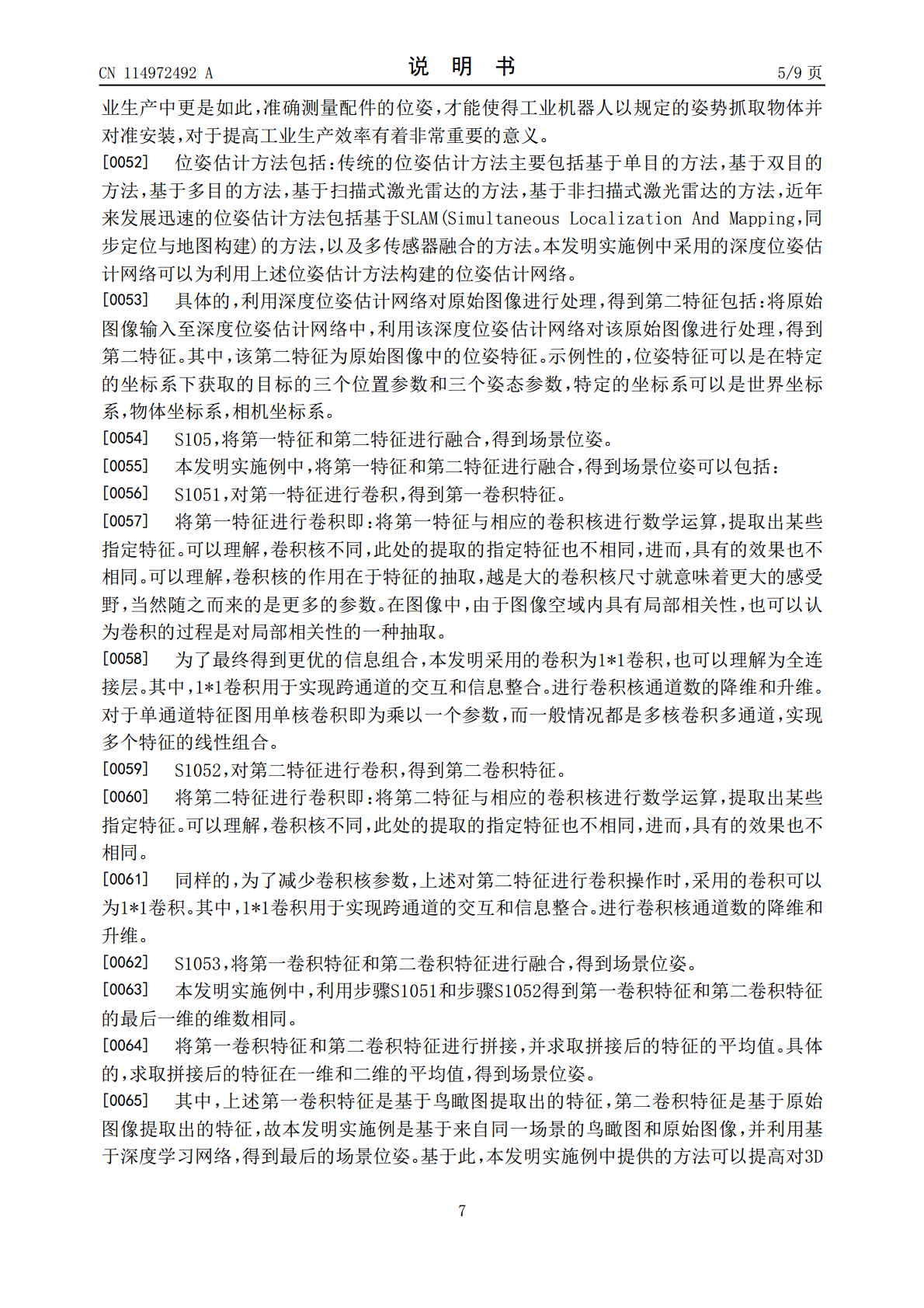
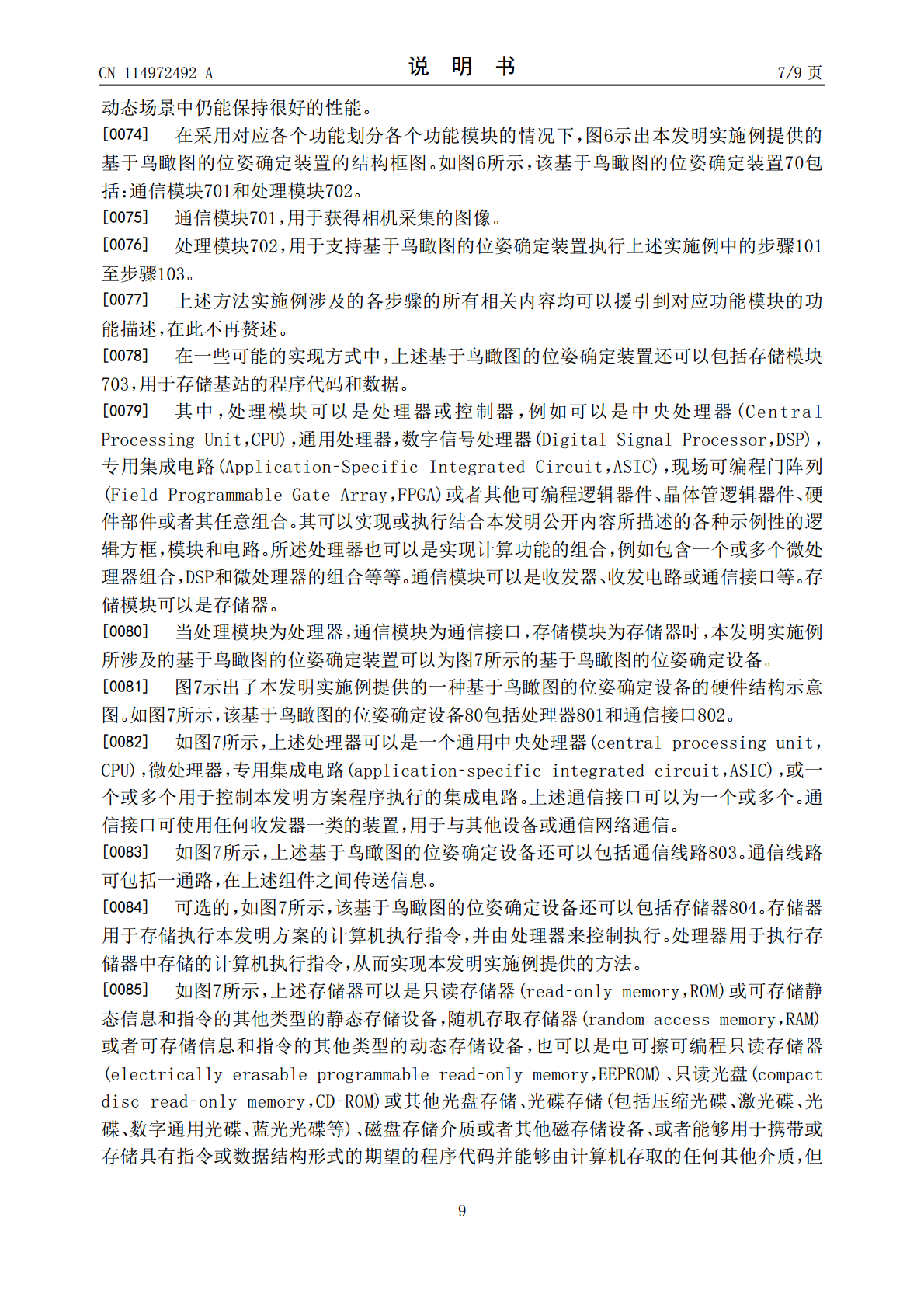
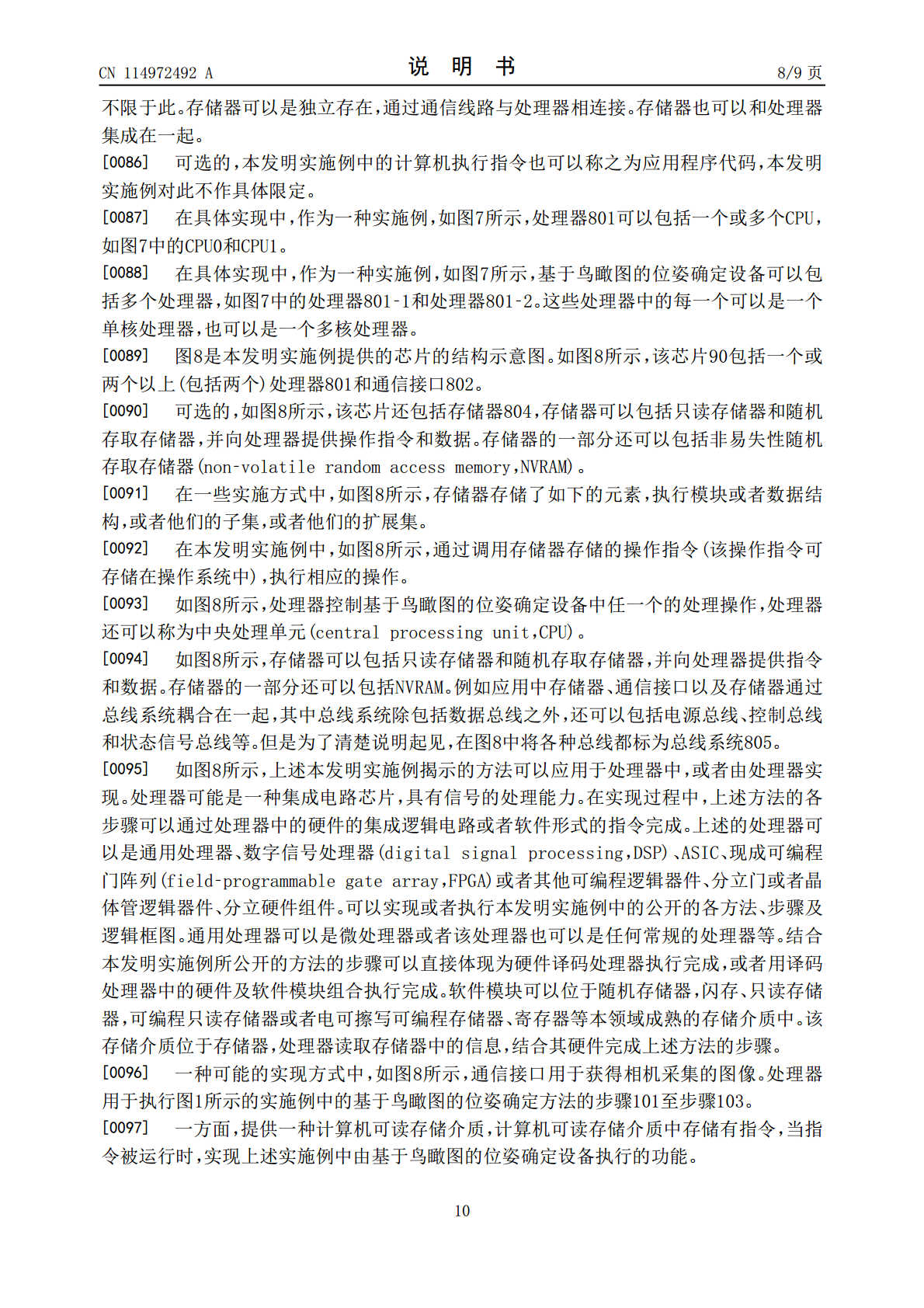
本发明公开一种基于鸟瞰图的位姿确定方法、设备和计算机存储介质,属于视觉定位技术领域,以解决目前的方法需要语义分割等大量的标注信息,在大规模的场景下代价太大的技术问题。包括以下步骤:获取同一场景的鸟瞰图和原始图像。对鸟瞰图中的运动目标进行掩膜处理,得到掩膜鸟瞰图。利用深度学习网络对掩膜鸟瞰图进行处理,得到第一特征。利用深度位姿估计网络对原始图像进行处理,得到第二特征。将第一特征和第二特征进行融合,得到场景位姿。
一种位姿确定方法、装置、自主移动设备和存储介质.pdf
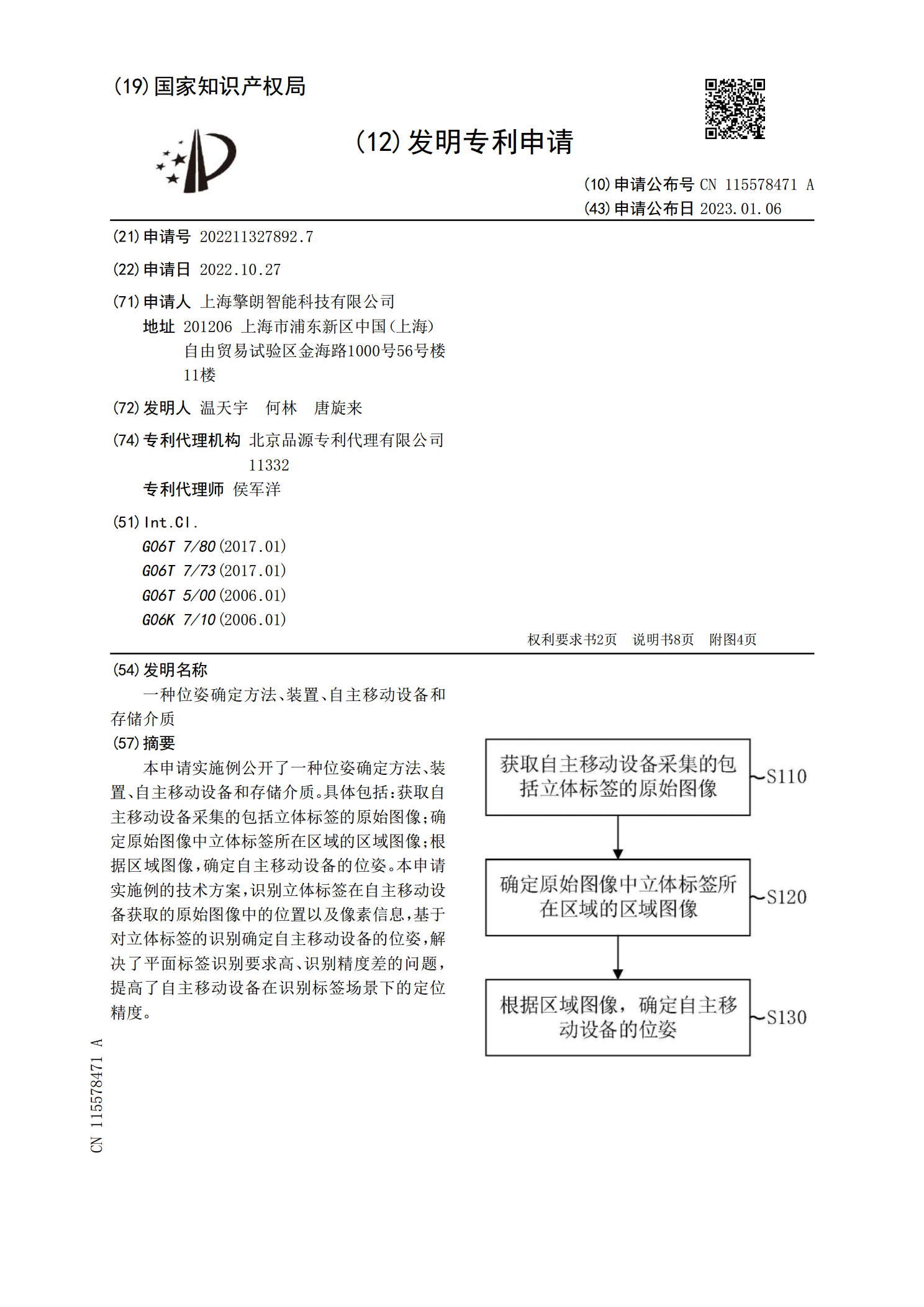
本申请实施例公开了一种位姿确定方法、装置、自主移动设备和存储介质。具体包括:获取自主移动设备采集的包括立体标签的原始图像;确定原始图像中立体标签所在区域的区域图像;根据区域图像,确定自主移动设备的位姿。本申请实施例的技术方案,识别立体标签在自主移动设备获取的原始图像中的位置以及像素信息,基于对立体标签的识别确定自主移动设备的位姿,解决了平面标签识别要求高、识别精度差的问题,提高了自主移动设备在识别标签场景下的定位精度。
位姿确定方法和装置、设备、介质.pdf
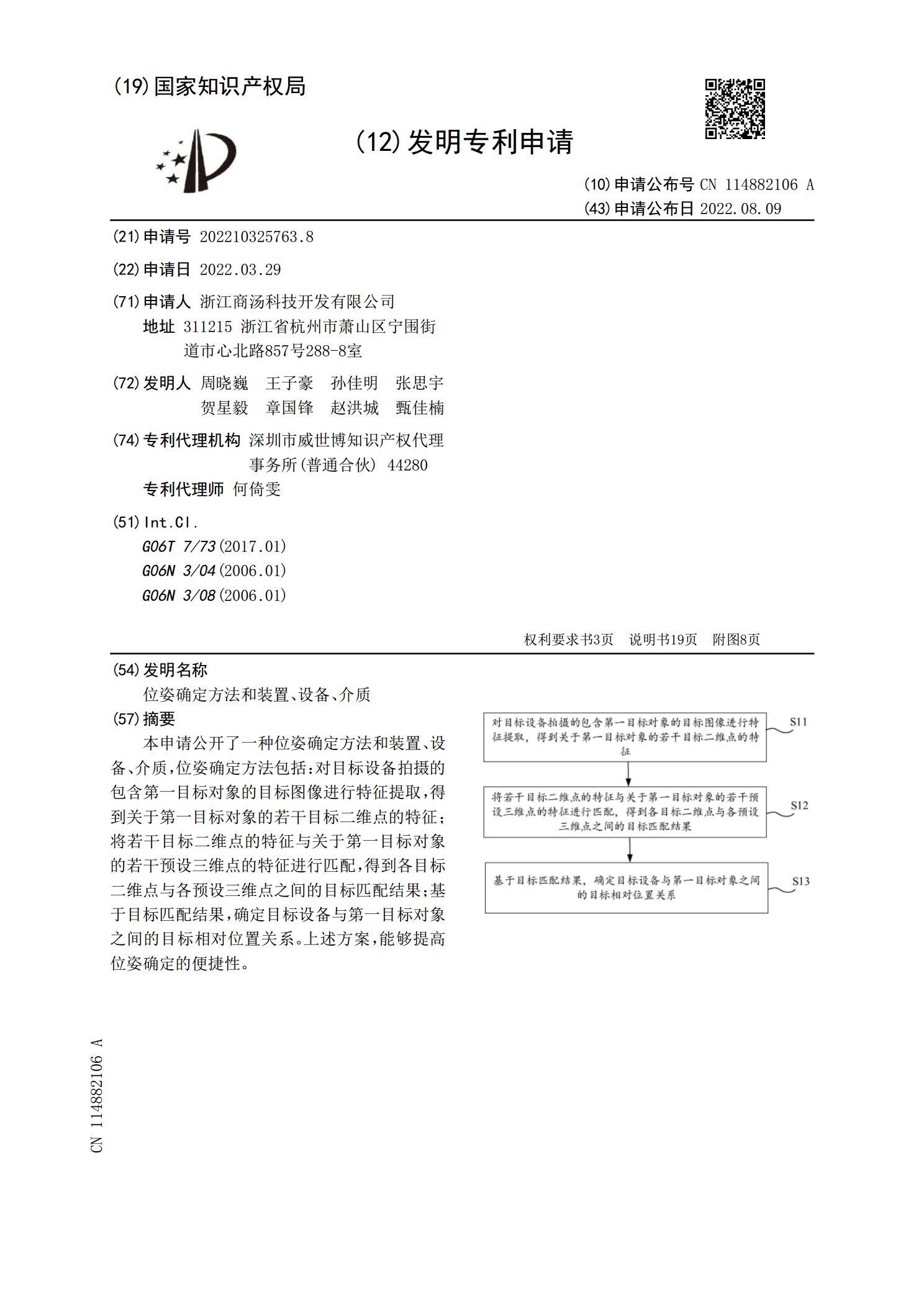
本申请公开了一种位姿确定方法和装置、设备、介质,位姿确定方法包括:对目标设备拍摄的包含第一目标对象的目标图像进行特征提取,得到关于第一目标对象的若干目标二维点的特征;将若干目标二维点的特征与关于第一目标对象的若干预设三维点的特征进行匹配,得到各目标二维点与各预设三维点之间的目标匹配结果;基于目标匹配结果,确定目标设备与第一目标对象之间的目标相对位置关系。上述方案,能够提高位姿确定的便捷性。
位姿确定方法、装置、电子设备及存储介质.pdf
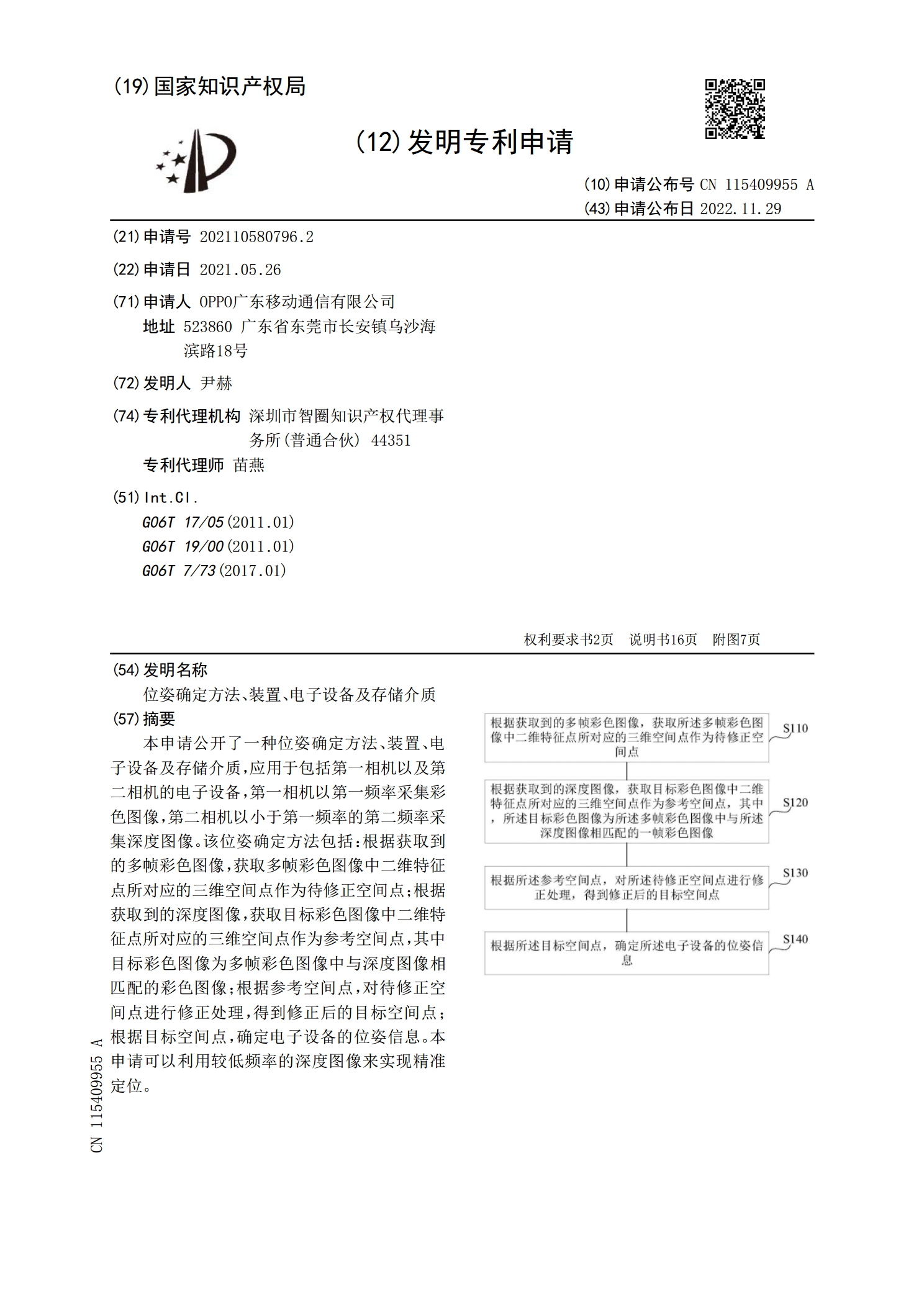
本申请公开了一种位姿确定方法、装置、电子设备及存储介质,应用于包括第一相机以及第二相机的电子设备,第一相机以第一频率采集彩色图像,第二相机以小于第一频率的第二频率采集深度图像。该位姿确定方法包括:根据获取到的多帧彩色图像,获取多帧彩色图像中二维特征点所对应的三维空间点作为待修正空间点;根据获取到的深度图像,获取目标彩色图像中二维特征点所对应的三维空间点作为参考空间点,其中目标彩色图像为多帧彩色图像中与深度图像相匹配的彩色图像;根据参考空间点,对待修正空间点进行修正处理,得到修正后的目标空间点;根据目标空间

亚像素位姿确定方法、装置、设备及存储介质.pdf
本发明涉及机器视觉技术领域,公开了一种亚像素位姿确定方法、装置、设备及存储介质。本发明通过获取待匹配目标在多维参数空间中的像素级位姿,以像素级位姿为中心,获取预设参数空间范围内的各位姿点对应的参数空间分值,然后根据各位姿点和各位姿点对应的参数空间分值构建超密度函数,再根据超密度函数确定待匹配目标的亚像素位姿。本发明通过以像素级位姿为中心,获取预设参数空间范围内的各位姿点对应的参数空间分值,能够减少计算量,再根据超密度函数确定待匹配目标的亚像素位姿,相较于现有的通过分值插值方法或最小二乘迭代方法计算亚像素位