
一种位姿图的优化方法、装置、设备及介质.pdf

光誉****君哥


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种位姿图的优化方法、装置、设备及介质.pdf
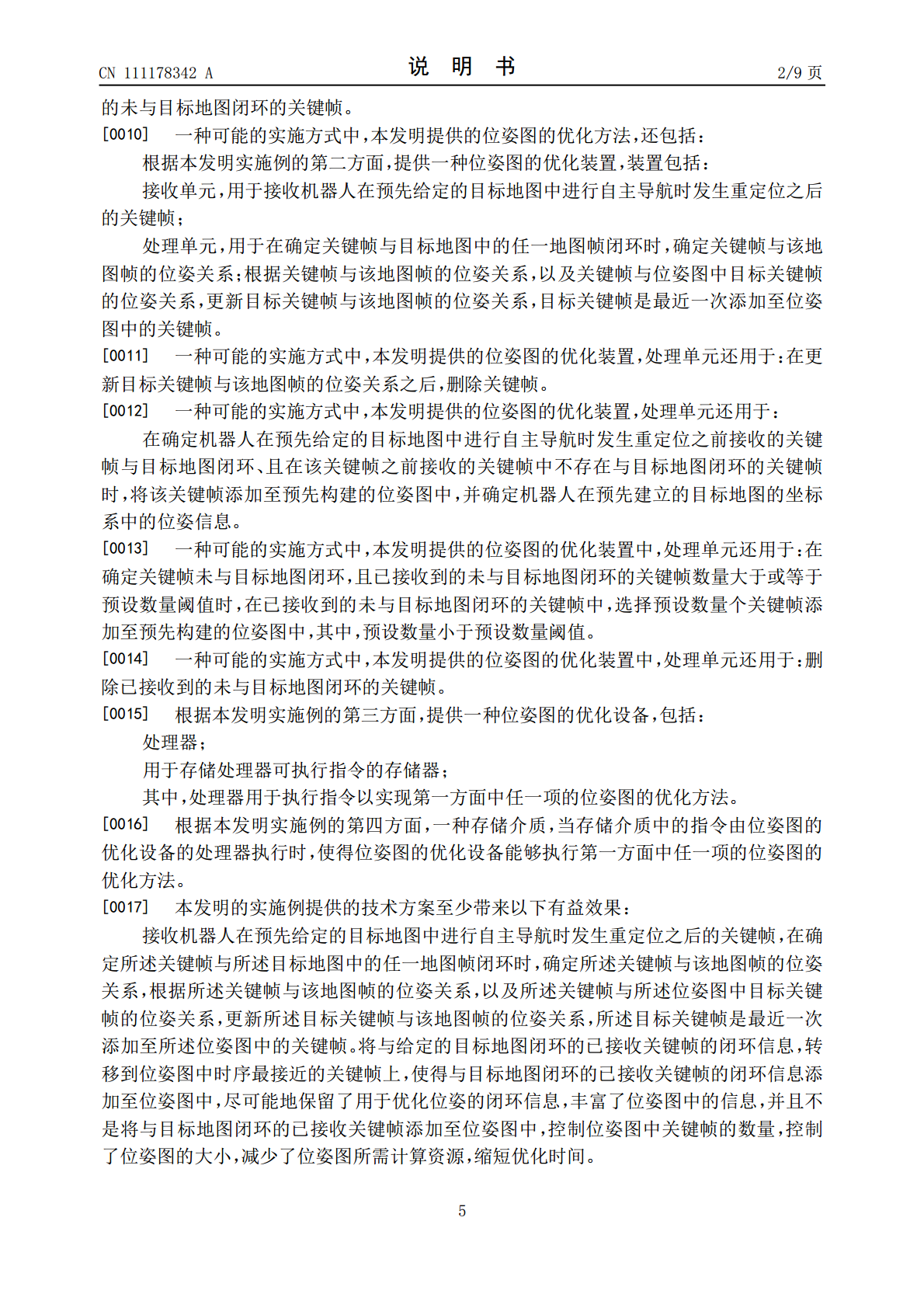
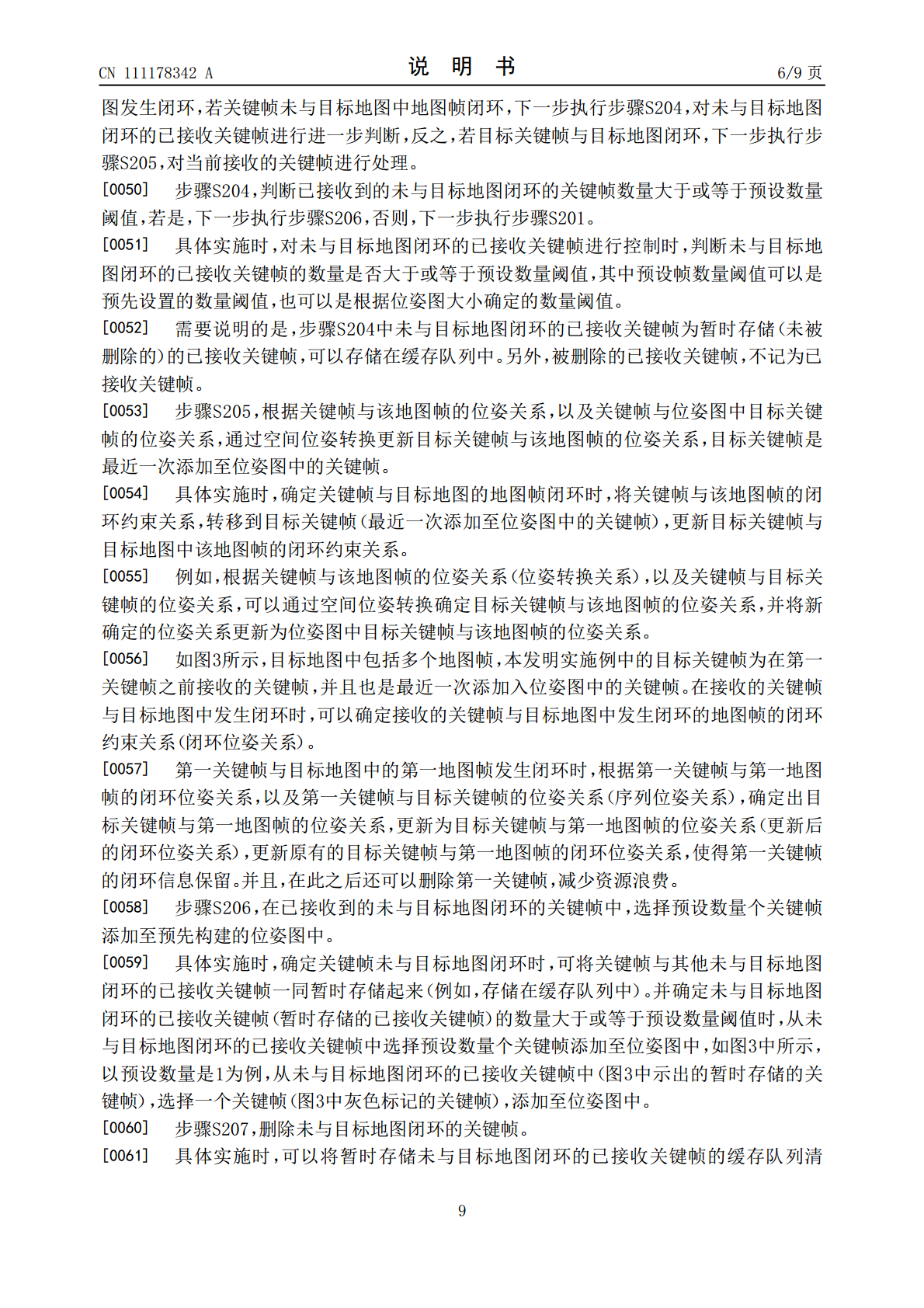
本发明提供一种位姿图的优化方法、装置、设备及介质,用以保留用于优化位姿的闭环信息,丰富位姿图中的信息,控制位姿图的大小,减少位姿图计算资源。所述位姿图的优化方法,包括:接收机器人在预先给定的目标地图中进行自主导航时发生重定位之后的关键帧;在确定所述关键帧与所述目标地图中的任一地图帧闭环时,确定所述关键帧与该地图帧的位姿关系;根据所述关键帧与该地图帧的位姿关系,以及所述关键帧与所述位姿图中目标关键帧的位姿关系,通过空间位姿转换更新所述目标关键帧与该地图帧的位姿关系,所述目标关键帧是最近一次添加至所述位姿图中
位姿优化方法、装置、设备和存储介质.pdf
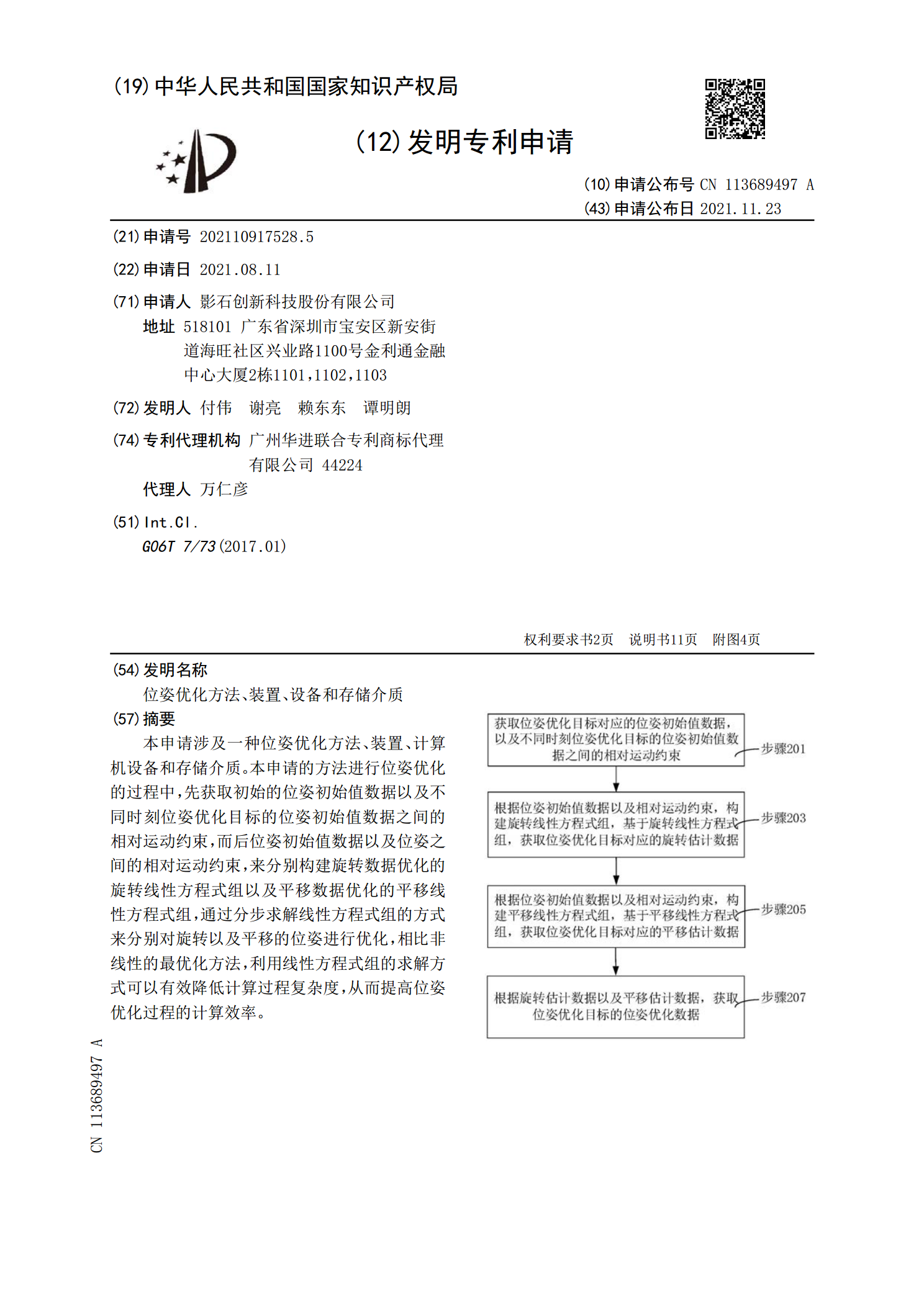
本申请涉及一种位姿优化方法、装置、计算机设备和存储介质。本申请的方法进行位姿优化的过程中,先获取初始的位姿初始值数据以及不同时刻位姿优化目标的位姿初始值数据之间的相对运动约束,而后位姿初始值数据以及位姿之间的相对运动约束,来分别构建旋转数据优化的旋转线性方程式组以及平移数据优化的平移线性方程式组,通过分步求解线性方程式组的方式来分别对旋转以及平移的位姿进行优化,相比非线性的最优化方法,利用线性方程式组的求解方式可以有效降低计算过程复杂度,从而提高位姿优化过程的计算效率。
位姿估计方法、装置、设备及介质.pdf
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的轮速计观测数据;根据预设轮速计模型和车辆运动学模型,获取轮速计观测数据表征的车辆名义状态的时间导数;对轮速计观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义位姿增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的轮速计误差置信度;根据指定传感器在T时刻观测数据和T+1时刻观测数据、轮速计观测数据对应的名义位
位姿估计方法、装置、设备及介质.pdf
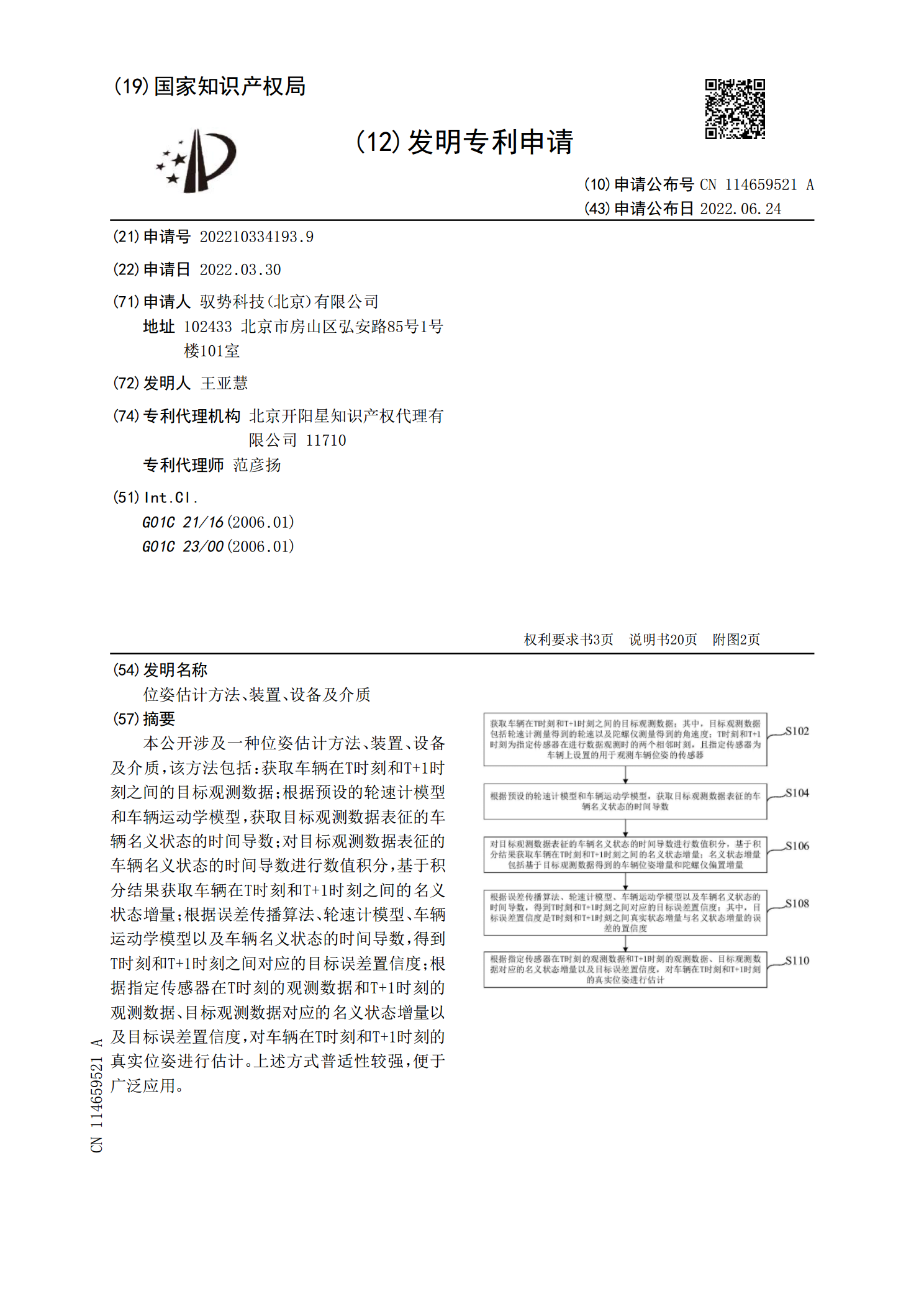
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的目标观测数据;根据预设的轮速计模型和车辆运动学模型,获取目标观测数据表征的车辆名义状态的时间导数;对目标观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义状态增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的目标误差置信度;根据指定传感器在T时刻的观测数据和T+1时刻的观测数据、目标观测数据对应的名义状态增
位姿确定方法和装置、设备、介质.pdf
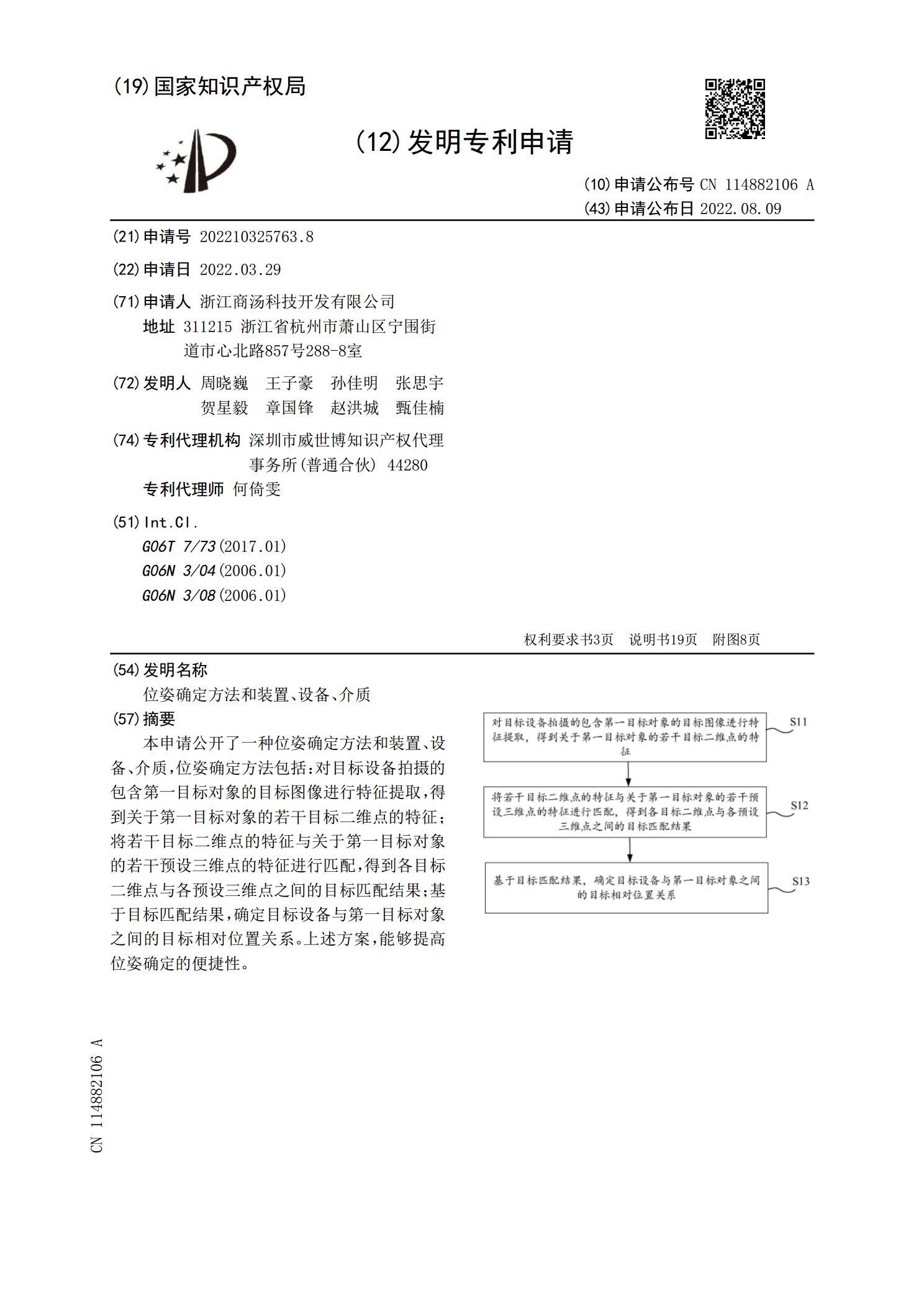
本申请公开了一种位姿确定方法和装置、设备、介质,位姿确定方法包括:对目标设备拍摄的包含第一目标对象的目标图像进行特征提取,得到关于第一目标对象的若干目标二维点的特征;将若干目标二维点的特征与关于第一目标对象的若干预设三维点的特征进行匹配,得到各目标二维点与各预设三维点之间的目标匹配结果;基于目标匹配结果,确定目标设备与第一目标对象之间的目标相对位置关系。上述方案,能够提高位姿确定的便捷性。