
外骨骼助力康复装置.pdf

念珊****写意


1/9

2/9

3/9
4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

外骨骼助力康复装置.pdf
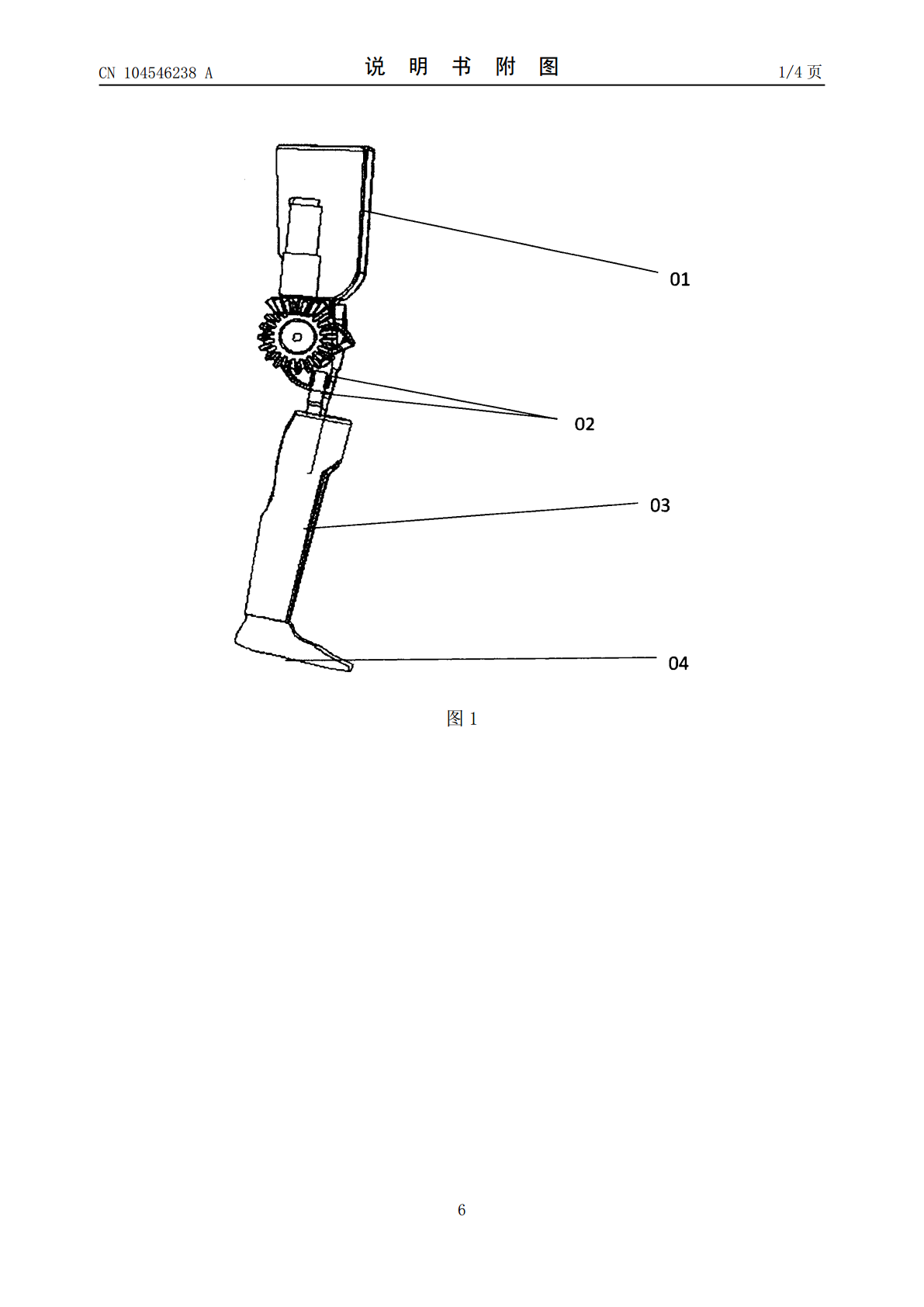
本发明公开一种外骨骼助力康复装置的驱动结构的设计,包含:直流电机,一对锥齿轮,直齿轮,内齿条,传动轴,固定板。所述的一对锥齿轮用于改变动力传输的方向;所述的直齿轮和一个锥齿轮组成同轴传动装置;所述的直齿轮和内齿条相互啮合;所述的内齿条的一端和外侧关节下端零件相固定;与现有技术相比,本发明电机采用竖直放置,减小了以往对电机体积的要求;另外本发明机械结构简单,控制精度高,传动力矩大,安全性高。
一种仿生外骨骼康复机械手助力装置及方法.pdf
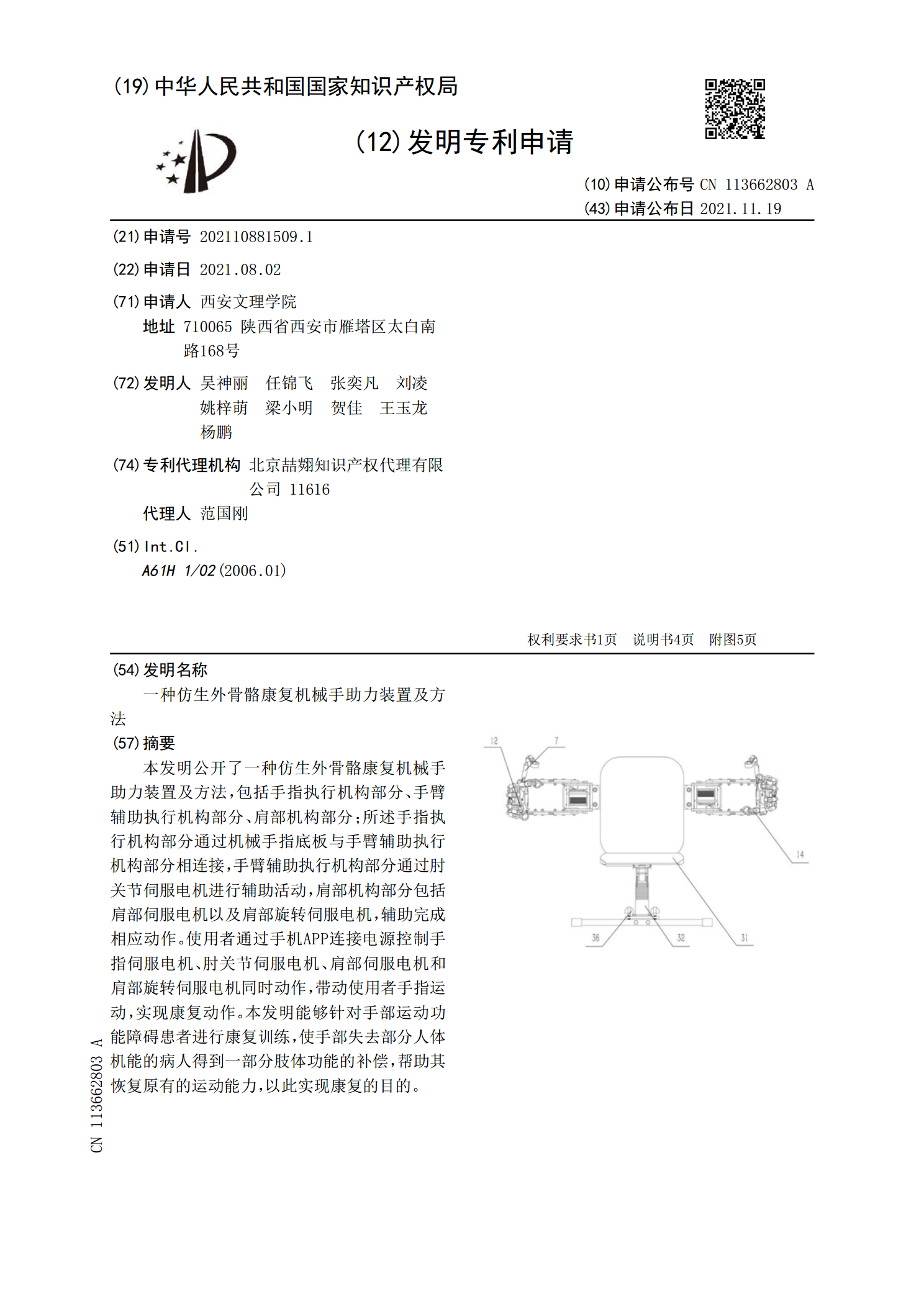
本发明公开了一种仿生外骨骼康复机械手助力装置及方法,包括手指执行机构部分、手臂辅助执行机构部分、肩部机构部分;所述手指执行机构部分通过机械手指底板与手臂辅助执行机构部分相连接,手臂辅助执行机构部分通过肘关节伺服电机进行辅助活动,肩部机构部分包括肩部伺服电机以及肩部旋转伺服电机,辅助完成相应动作。使用者通过手机APP连接电源控制手指伺服电机、肘关节伺服电机、肩部伺服电机和肩部旋转伺服电机同时动作,带动使用者手指运动,实现康复动作。本发明能够针对手部运动功能障碍患者进行康复训练,使手部失去部分人体机能的病人得

一种助力外骨骼装置.pdf
本发明提供了一种助力外骨骼装置,包括穿戴背心和手臂支撑机构;所述手臂支撑机构为两组,对称固定于所述穿戴背心的支撑座上;所述手臂支撑机构包括第一支撑杆、第二支撑杆、弹性机构等组件,由于弹性机构在工作中不便于更换,因此我们采用改变弹性机构上支点到手臂支撑构件的十字万向节的距离的方式实现支持力的自适应,即可以在相同位置提供不同大小的力;本发明的有益效果在于:不需要外接动力源,装置结构简单,便于携带,工作时能够提供稳定的支撑力;通过无极调节改变助力大小,无需额外换接零件。
一种腰部外骨骼助力装置.pdf
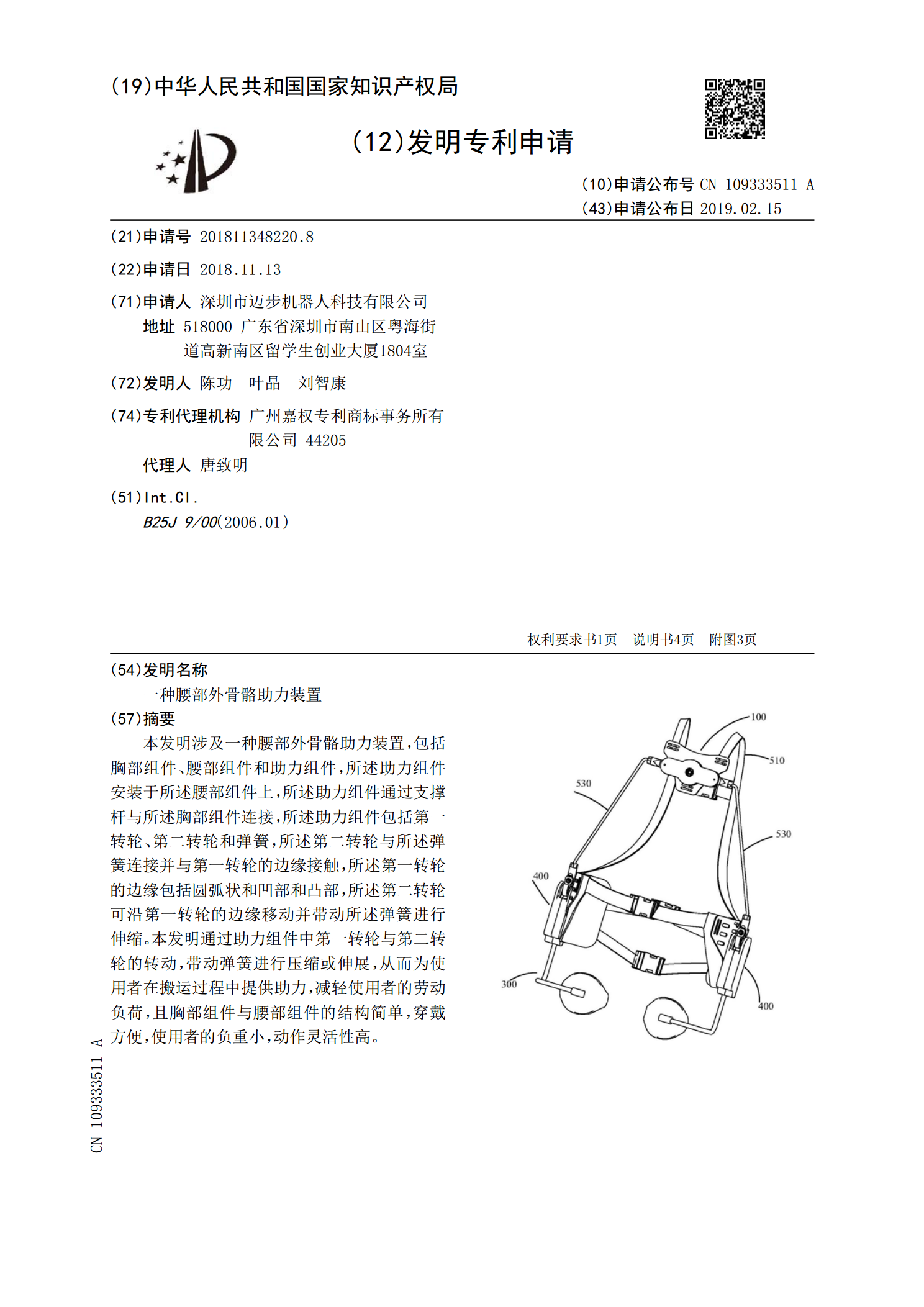
本发明涉及一种腰部外骨骼助力装置,包括胸部组件、腰部组件和助力组件,所述助力组件安装于所述腰部组件上,所述助力组件通过支撑杆与所述胸部组件连接,所述助力组件包括第一转轮、第二转轮和弹簧,所述第二转轮与所述弹簧连接并与第一转轮的边缘接触,所述第一转轮的边缘包括圆弧状和凹部和凸部,所述第二转轮可沿第一转轮的边缘移动并带动所述弹簧进行伸缩。本发明通过助力组件中第一转轮与第二转轮的转动,带动弹簧进行压缩或伸展,从而为使用者在搬运过程中提供助力,减轻使用者的劳动负荷,且胸部组件与腰部组件的结构简单,穿戴方便,使用者
膝关节运动助力外骨骼装置.pdf
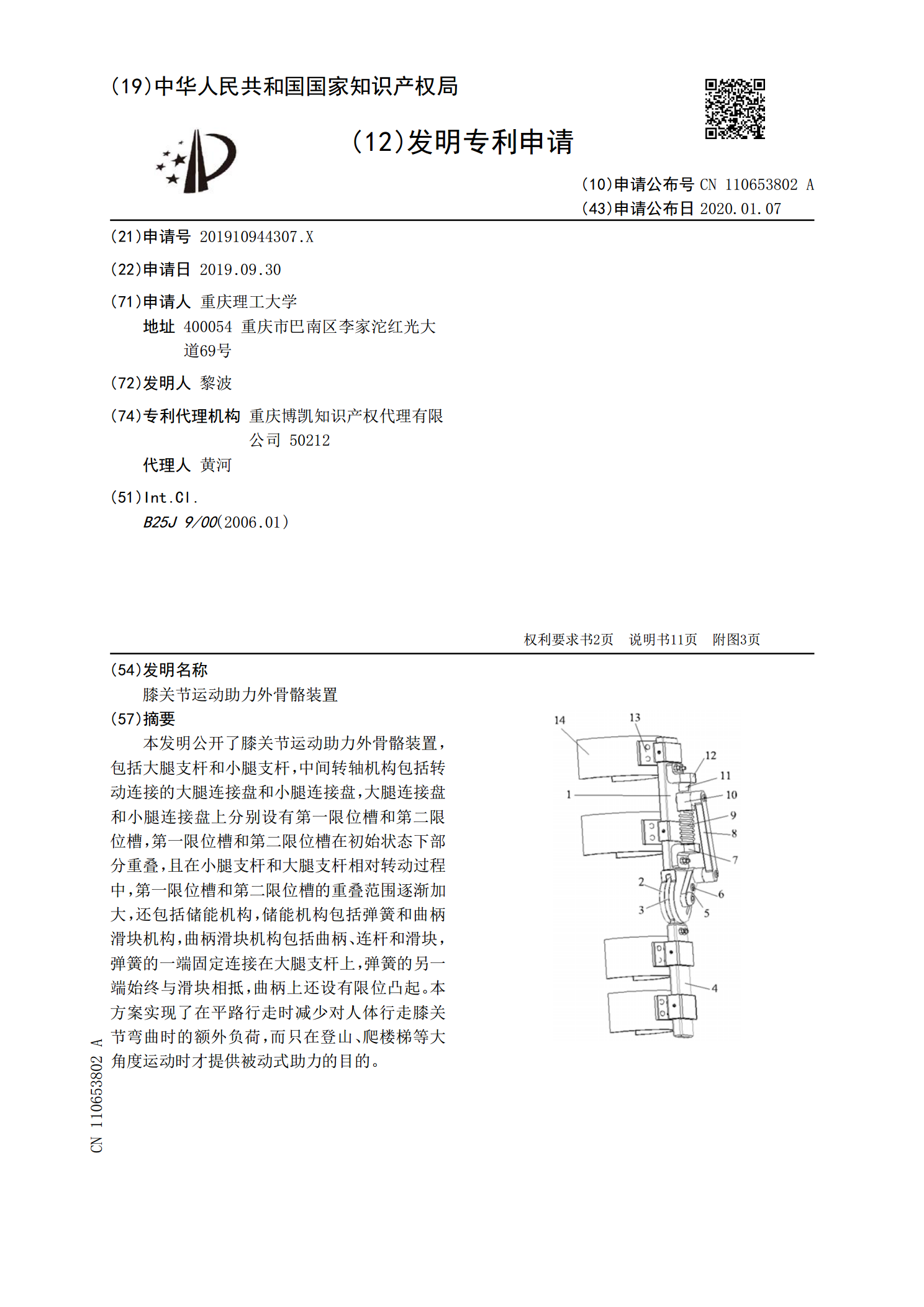
本发明公开了膝关节运动助力外骨骼装置,包括大腿支杆和小腿支杆,中间转轴机构包括转动连接的大腿连接盘和小腿连接盘,大腿连接盘和小腿连接盘上分别设有第一限位槽和第二限位槽,第一限位槽和第二限位槽在初始状态下部分重叠,且在小腿支杆和大腿支杆相对转动过程中,第一限位槽和第二限位槽的重叠范围逐渐加大,还包括储能机构,储能机构包括弹簧和曲柄滑块机构,曲柄滑块机构包括曲柄、连杆和滑块,弹簧的一端固定连接在大腿支杆上,弹簧的另一端始终与滑块相抵,曲柄上还设有限位凸起。本方案实现了在平路行走时减少对人体行走膝关节弯曲时的额