
一种碰撞预警的方法、装置、电子设备及存储介质.pdf

是你****盟主


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种碰撞预警的方法、装置、电子设备及存储介质.pdf
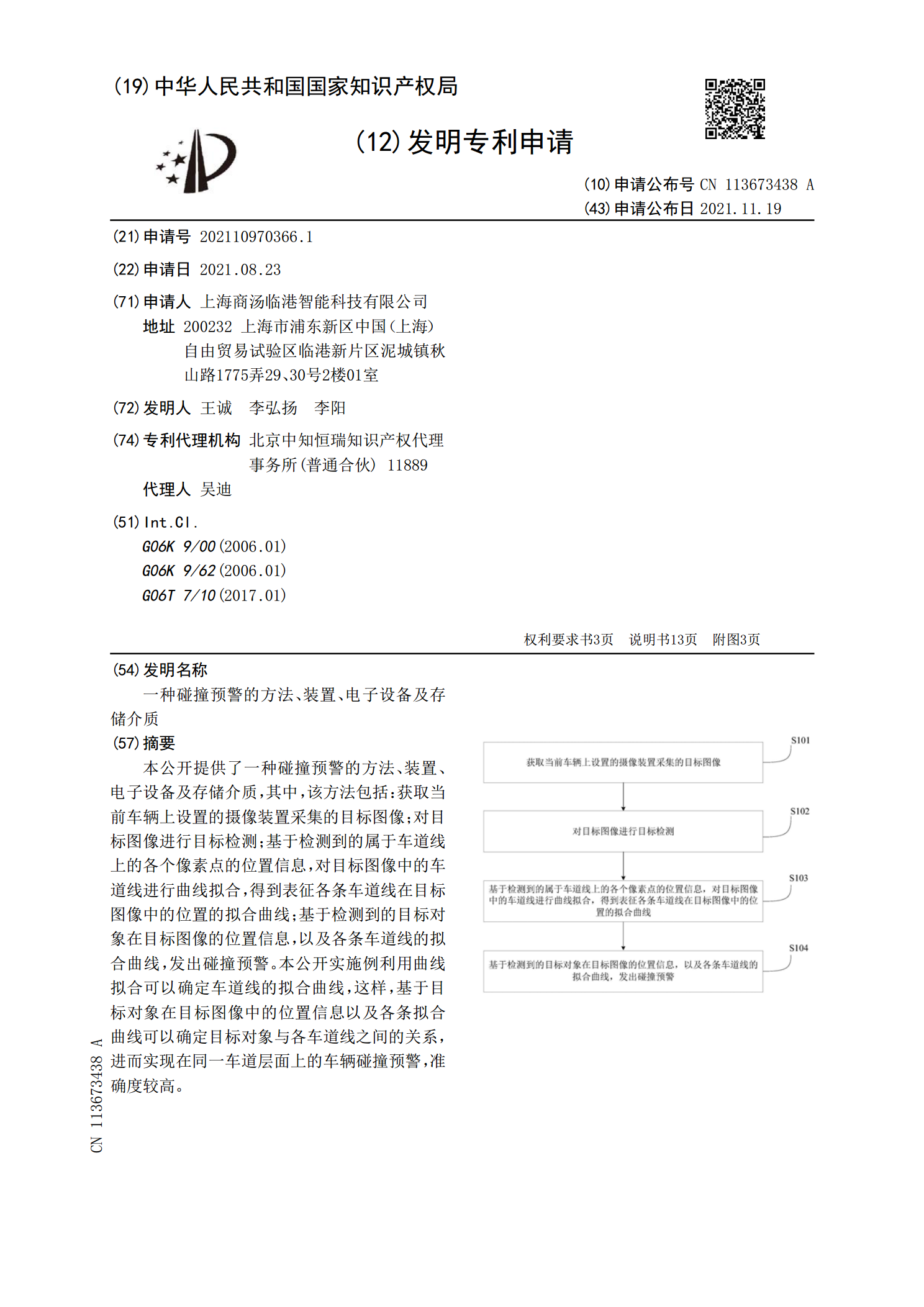
本公开提供了一种碰撞预警的方法、装置、电子设备及存储介质,其中,该方法包括:获取当前车辆上设置的摄像装置采集的目标图像;对目标图像进行目标检测;基于检测到的属于车道线上的各个像素点的位置信息,对目标图像中的车道线进行曲线拟合,得到表征各条车道线在目标图像中的位置的拟合曲线;基于检测到的目标对象在目标图像的位置信息,以及各条车道线的拟合曲线,发出碰撞预警。本公开实施例利用曲线拟合可以确定车道线的拟合曲线,这样,基于目标对象在目标图像中的位置信息以及各条拟合曲线可以确定目标对象与各车道线之间的关系,进而实现在

一种碰撞预警方法、装置、电子设备及存储介质.pdf
本发明提供一种碰撞预警方法、装置、电子设备及存储介质,涉及虚拟现实领域,方法包括:构建与真实环境对应的虚拟环境,并将用户及真实环境中的物体定位至虚拟环境;利用物体的位置信息预测物体对应的运动轨迹;将运动轨迹映射至虚拟环境,以利用用户的位置信息及运动轨迹进行碰撞预警;可将用户及真实环境中的物体定位至与真实环境对应的虚拟环境,并可基于各物体的位置信息,预测各物体对应的运动轨迹,从而可在虚拟环境汇中根据用户的位置及物体的运动轨迹预测用户与物体发生碰撞的可能性,并可在确定即将发生碰撞时及时地向用户发出预警,以提醒

目标碰撞预警方法、装置及电子设备、存储介质.pdf
本申请公开了一种目标碰撞预警方法、装置及电子设备、存储介质,该方法包括:获取车辆摄像头采集的待检测图像,利用预设目标检测算法对待检测图像进行目标检测,得到目标检测结果;根据目标检测结果及车辆摄像头对应的预警区域中各个子预警区域的位置,确定目标所在的子预警区域以及目标在子预警区域的驻留状态;根据目标在子预警区域的驻留状态,确定目标是否满足子预警区域对应的预设预警条件;在目标满足子预警区域对应的预设预警条件的情况下,触发目标碰撞预警提醒。本申请算法实现简单,不需要计算目标的实际距离也能及时、准确进行碰撞报警。
车辆碰撞预警方法、装置、电子设备及存储介质.pdf
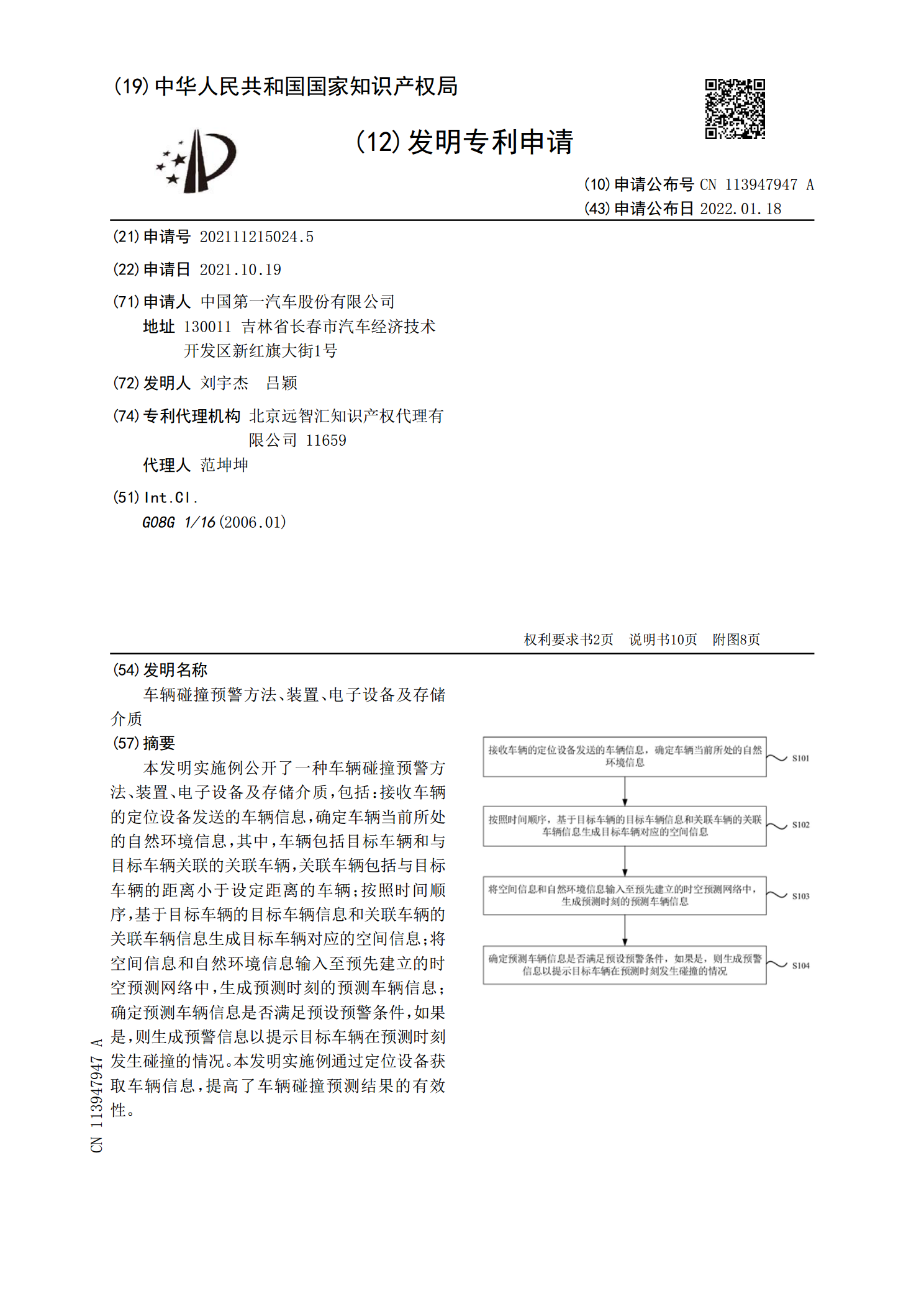
本发明实施例公开了一种车辆碰撞预警方法、装置、电子设备及存储介质,包括:接收车辆的定位设备发送的车辆信息,确定车辆当前所处的自然环境信息,其中,车辆包括目标车辆和与目标车辆关联的关联车辆,关联车辆包括与目标车辆的距离小于设定距离的车辆;按照时间顺序,基于目标车辆的目标车辆信息和关联车辆的关联车辆信息生成目标车辆对应的空间信息;将空间信息和自然环境信息输入至预先建立的时空预测网络中,生成预测时刻的预测车辆信息;确定预测车辆信息是否满足预设预警条件,如果是,则生成预警信息以提示目标车辆在预测时刻发生碰撞的情况

碰撞预警方法及装置、车载设备及存储介质.pdf
本申请实施例提供一种碰撞预警方法及装置、车载设备及存储介质,所述碰撞预警方法包括:获取行驶场景红外图像,对所述行驶场景红外图像进行目标检测,输出所述行驶场景红外图像中包含的目标对象类别及其位置的目标检测结果;获取目标对象的始帧红外图像和次帧红外图像,分别确定所述始帧红外图像对应的始帧对象及所述次帧红外图像对应的次帧对象,根据所述始帧对象和所述次帧对象的匹配结果确定跟踪对象,输出包含所述跟踪对象位置及其大小的目标跟踪结果;根据所述目标检测结果和所述目标跟踪结果确定疑似碰撞目标,根据危险系数满足预设条件的所述