
三维地图的构建方法、装置、电子设备及存储介质.pdf

元枫****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

三维地图的构建方法、装置、电子设备及存储介质.pdf
本申请公开了一种三维地图的构建方法、装置、电子设备及存储介质。三维地图的构建方法,包括:获取移动摄像装置在目标区域内所拍摄的至少一帧图像;对每一帧所述图像进行语义分割,得到对应的语义分割信息;根据所述对应的语义分割信息对各所述图像进行位姿估计,得到位姿估计结果;结合对应于每一帧所述图像的所述语义分割信息以及所述位姿估计结果,构建三维地图。本申请实施例提供的三维地图的构建方法,以场景语义分割所获得的高层认知信息为基础,提出能够有效应对场景极端外观变化的长期视觉SLAM方法;通过融合语义信息的地图表示及其更新

地图构建方法、装置、电子设备及存储介质.pdf
本申请实施例公开了一种地图构建方法、装置、电子设备及存储介质。其中方法包括:电子设备通过第一天线模组和第二天线模组确定目标设备的第一位置信息,然后接收目标设备发送的目标数据,再根据目标数据确定目标设备的第二位置信息,最后根据第一位置信息和第二位置信息构建地图。在本申请实施例中,仅仅需要电子设备和目标设备之间配合,就可以完成对室内地图的构建,提升了构建地图的便利性。
地图构建方法、装置及存储介质.pdf
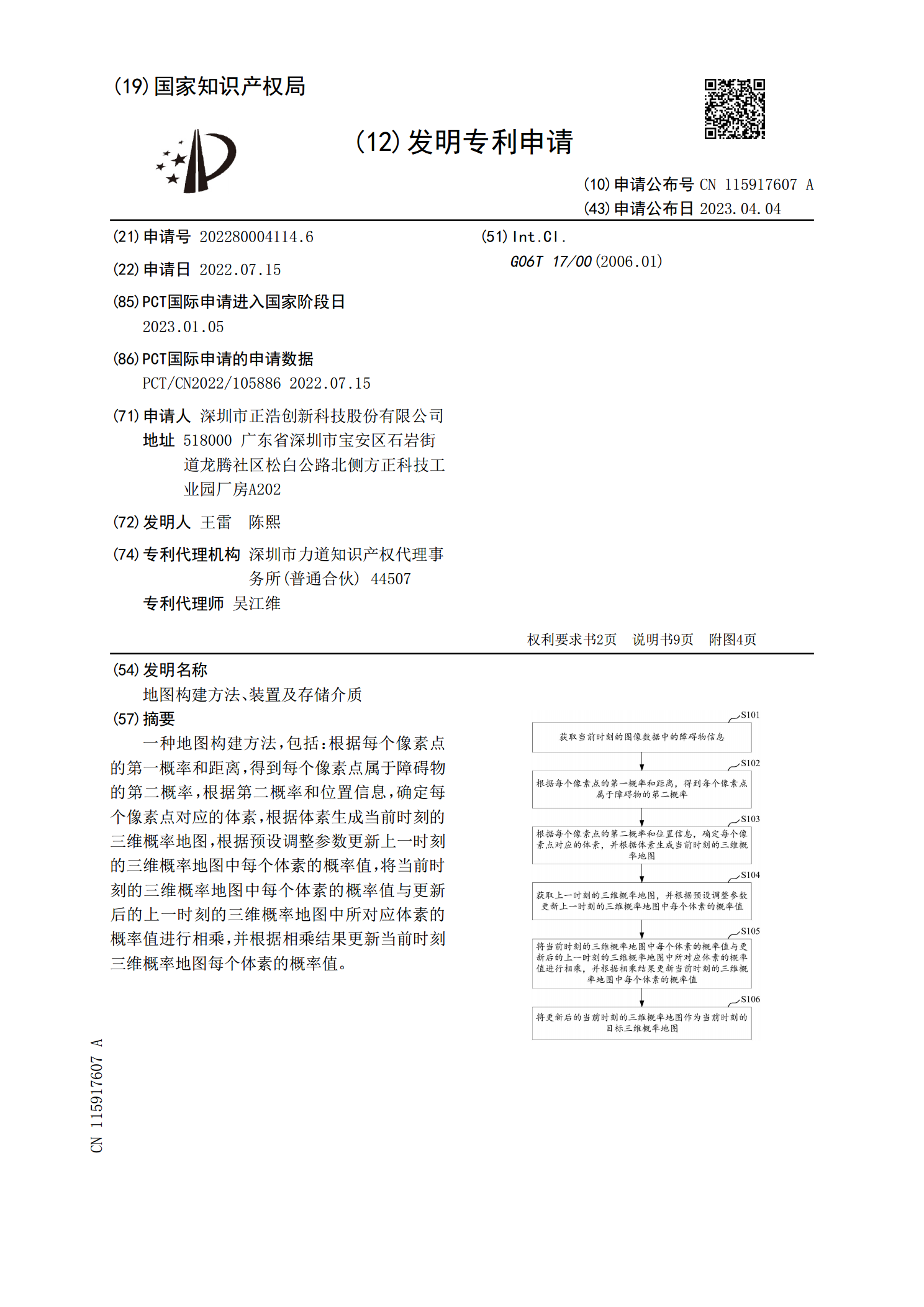
一种地图构建方法,包括:根据每个像素点的第一概率和距离,得到每个像素点属于障碍物的第二概率,根据第二概率和位置信息,确定每个像素点对应的体素,根据体素生成当前时刻的三维概率地图,根据预设调整参数更新上一时刻的三维概率地图中每个体素的概率值,将当前时刻的三维概率地图中每个体素的概率值与更新后的上一时刻的三维概率地图中所对应体素的概率值进行相乘,并根据相乘结果更新当前时刻三维概率地图每个体素的概率值。
即时定位与地图构建方法、装置、电子设备及可读存储介质.pdf
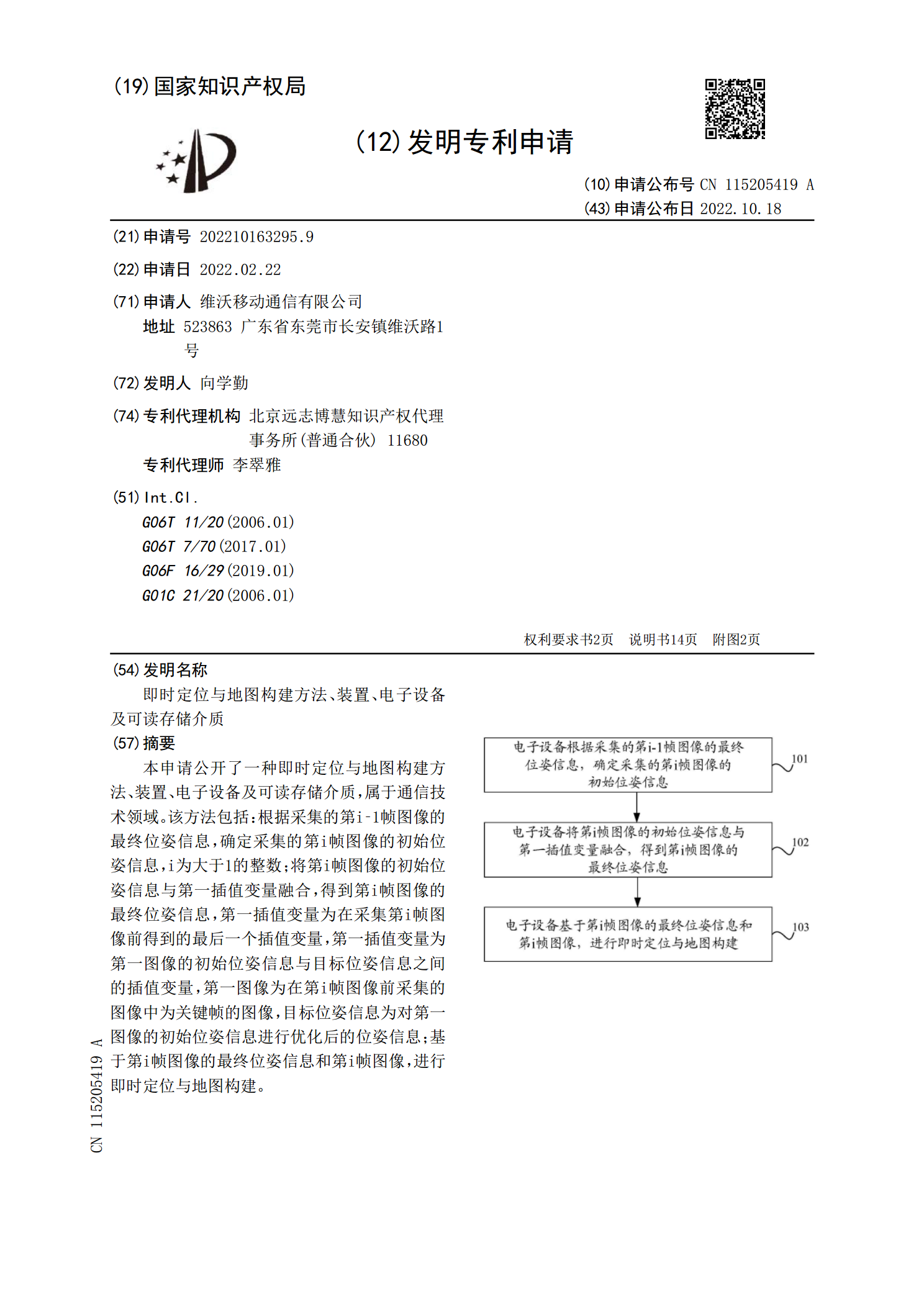
本申请公开了一种即时定位与地图构建方法、装置、电子设备及可读存储介质,属于通信技术领域。该方法包括:根据采集的第i?1帧图像的最终位姿信息,确定采集的第i帧图像的初始位姿信息,i为大于1的整数;将第i帧图像的初始位姿信息与第一插值变量融合,得到第i帧图像的最终位姿信息,第一插值变量为在采集第i帧图像前得到的最后一个插值变量,第一插值变量为第一图像的初始位姿信息与目标位姿信息之间的插值变量,第一图像为在第i帧图像前采集的图像中为关键帧的图像,目标位姿信息为对第一图像的初始位姿信息进行优化后的位姿信息;基于第

三维点云地图构建方法、系统、电子设备及存储介质.pdf
本发明提供一种三维点云地图构建方法、系统、电子设备及存储介质,该方法包括:基于n帧点云构建初始点云地图和初始位姿图;新建体素;在体素中加入第i帧点云后,确定体素中目标体素单元的个数,其中目标体素单元为包含有加入的各帧点云中的点的体素单元,而后根据目标体素单元的个数确定第i帧点云是否为关键帧点云,若是,则将所有目标体素单元中点云的点清零,令i=i+1,反之,则直接令i=i+1,并重新在体素中加入第i帧点云,直至i=n;基于n帧点云中的关键帧点云和非关键帧点云以及初始位姿图,获取每帧点云的目标位姿;基于n帧点