
地图构建方法、装置及存储介质.pdf

瀚玥****魔王

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
地图构建方法、装置及存储介质.pdf
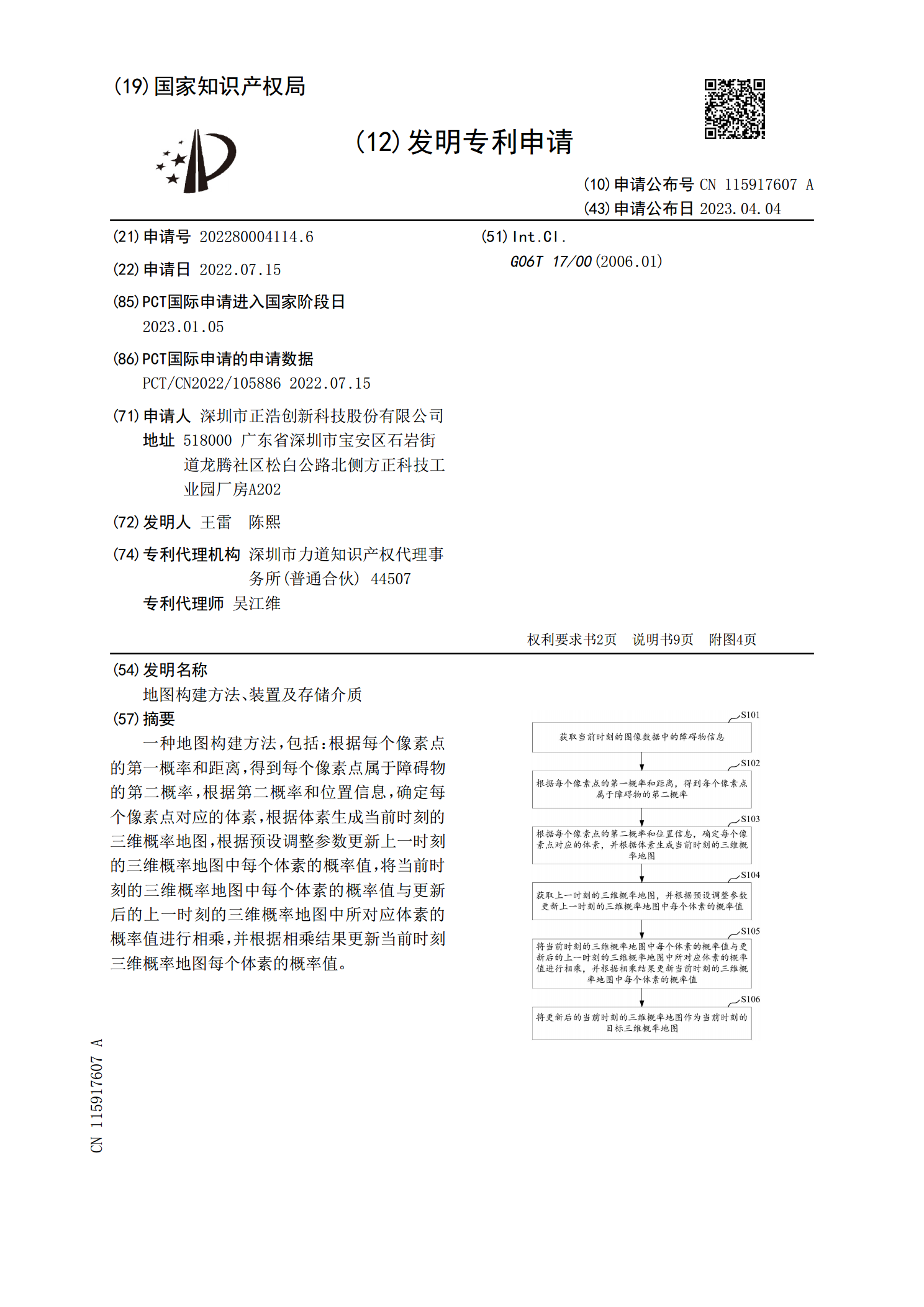
一种地图构建方法,包括:根据每个像素点的第一概率和距离,得到每个像素点属于障碍物的第二概率,根据第二概率和位置信息,确定每个像素点对应的体素,根据体素生成当前时刻的三维概率地图,根据预设调整参数更新上一时刻的三维概率地图中每个体素的概率值,将当前时刻的三维概率地图中每个体素的概率值与更新后的上一时刻的三维概率地图中所对应体素的概率值进行相乘,并根据相乘结果更新当前时刻三维概率地图每个体素的概率值。
信标地图构建方法、装置、设备及存储介质.pdf
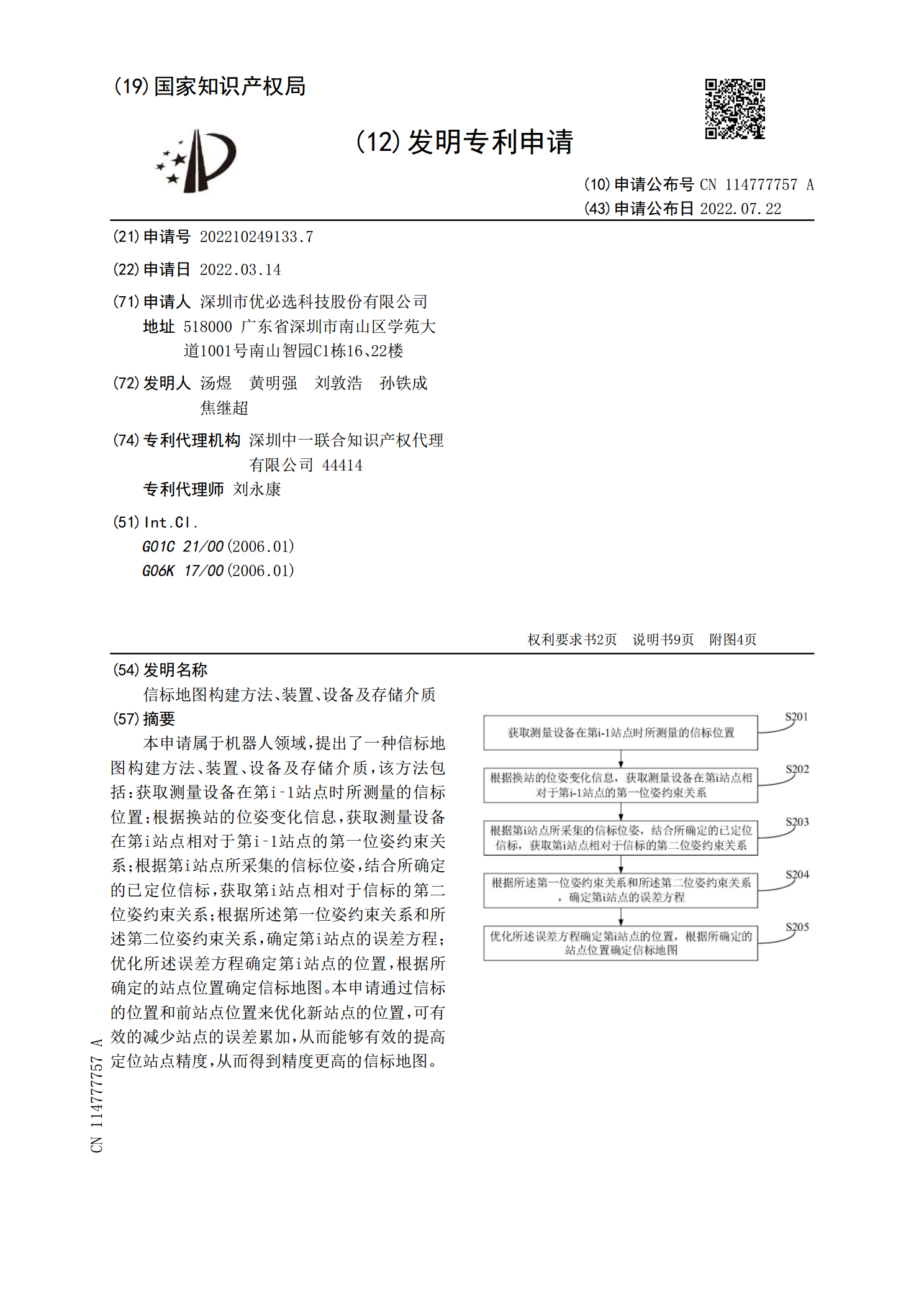
本申请属于机器人领域,提出了一种信标地图构建方法、装置、设备及存储介质,该方法包括:获取测量设备在第i?1站点时所测量的信标位置;根据换站的位姿变化信息,获取测量设备在第i站点相对于第i?1站点的第一位姿约束关系;根据第i站点所采集的信标位姿,结合所确定的已定位信标,获取第i站点相对于信标的第二位姿约束关系;根据所述第一位姿约束关系和所述第二位姿约束关系,确定第i站点的误差方程;优化所述误差方程确定第i站点的位置,根据所确定的站点位置确定信标地图。本申请通过信标的位置和前站点位置来优化新站点的位置,可有效
地图构建方法、地图使用方法、装置、设备和存储介质.pdf
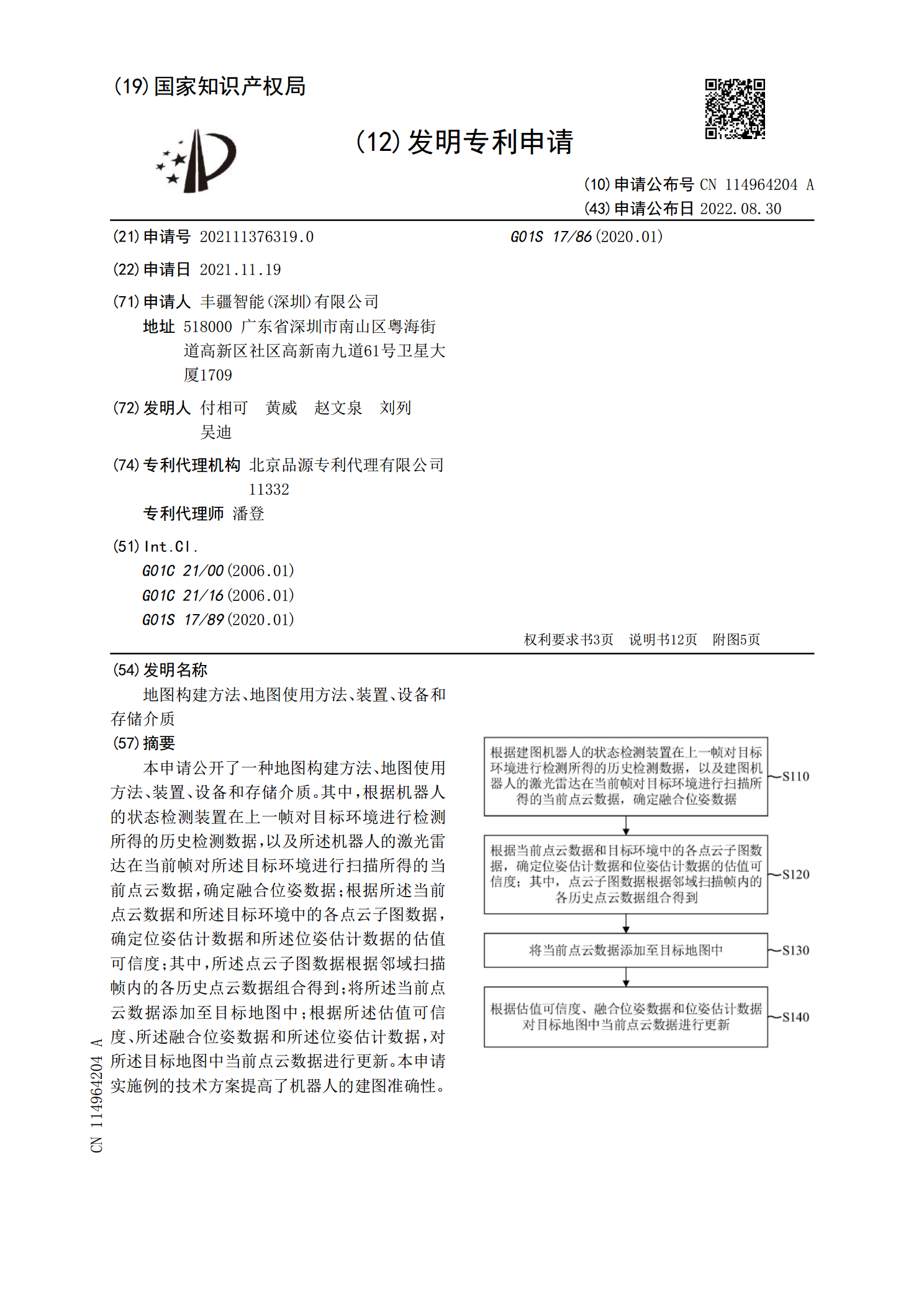
本申请公开了一种地图构建方法、地图使用方法、装置、设备和存储介质。其中,根据机器人的状态检测装置在上一帧对目标环境进行检测所得的历史检测数据,以及所述机器人的激光雷达在当前帧对所述目标环境进行扫描所得的当前点云数据,确定融合位姿数据;根据所述当前点云数据和所述目标环境中的各点云子图数据,确定位姿估计数据和所述位姿估计数据的估值可信度;其中,所述点云子图数据根据邻域扫描帧内的各历史点云数据组合得到;将所述当前点云数据添加至目标地图中;根据所述估值可信度、所述融合位姿数据和所述位姿估计数据,对所述目标地图中当
语义地图构建方法、装置、设备和存储介质.pdf
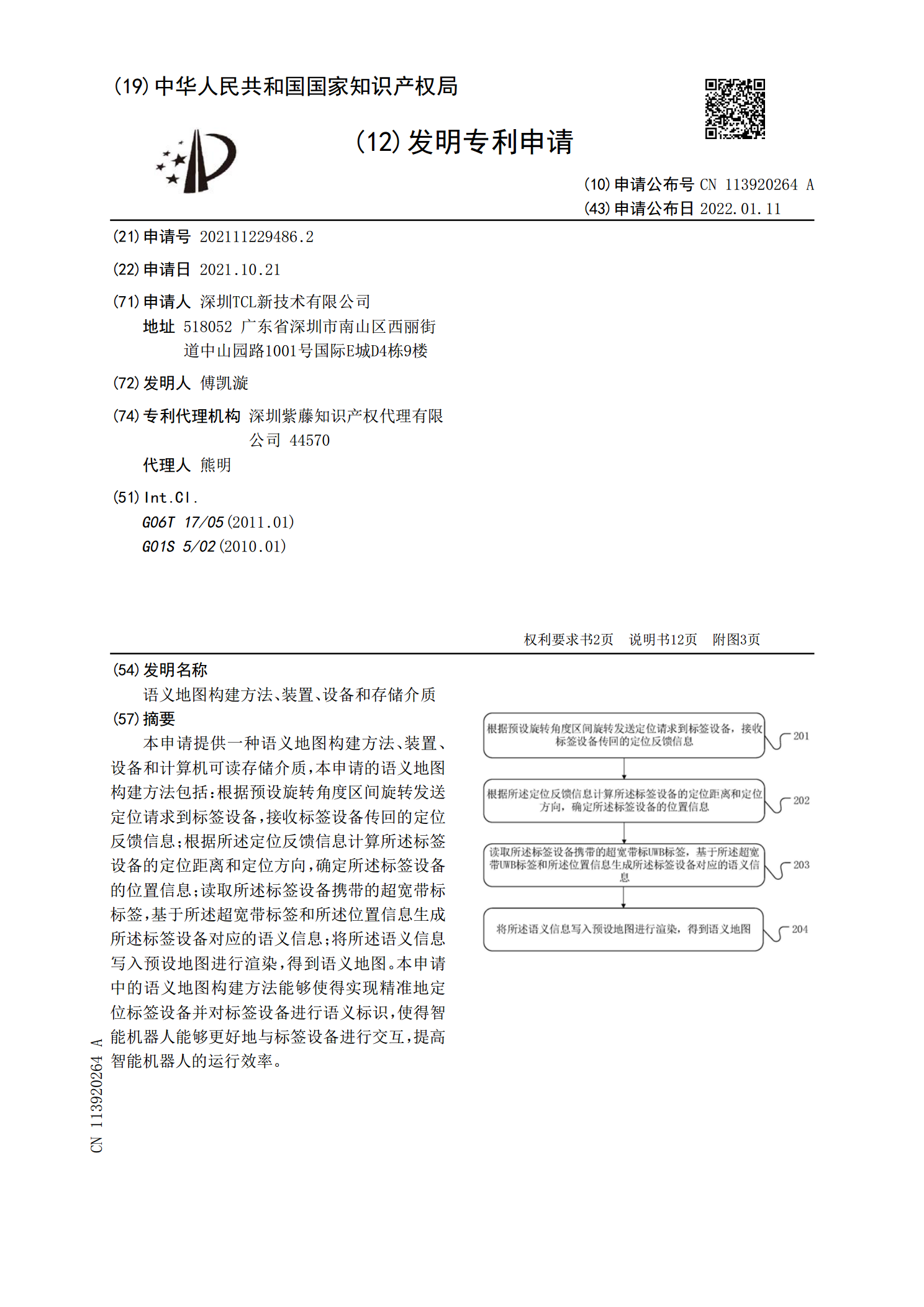
本申请提供一种语义地图构建方法、装置、设备和计算机可读存储介质,本申请的语义地图构建方法包括:根据预设旋转角度区间旋转发送定位请求到标签设备,接收标签设备传回的定位反馈信息;根据所述定位反馈信息计算所述标签设备的定位距离和定位方向,确定所述标签设备的位置信息;读取所述标签设备携带的超宽带标标签,基于所述超宽带标签和所述位置信息生成所述标签设备对应的语义信息;将所述语义信息写入预设地图进行渲染,得到语义地图。本申请中的语义地图构建方法能够使得实现精准地定位标签设备并对标签设备进行语义标识,使得智能机器人能够

地图构建方法、装置、电子设备及存储介质.pdf
本申请实施例公开了一种地图构建方法、装置、电子设备及存储介质。其中方法包括:电子设备通过第一天线模组和第二天线模组确定目标设备的第一位置信息,然后接收目标设备发送的目标数据,再根据目标数据确定目标设备的第二位置信息,最后根据第一位置信息和第二位置信息构建地图。在本申请实施例中,仅仅需要电子设备和目标设备之间配合,就可以完成对室内地图的构建,提升了构建地图的便利性。