
即时定位与地图构建方法、装置、电子设备及可读存储介质.pdf

小宏****aa

1/10
2/10
3/10
4/10
5/10
6/10
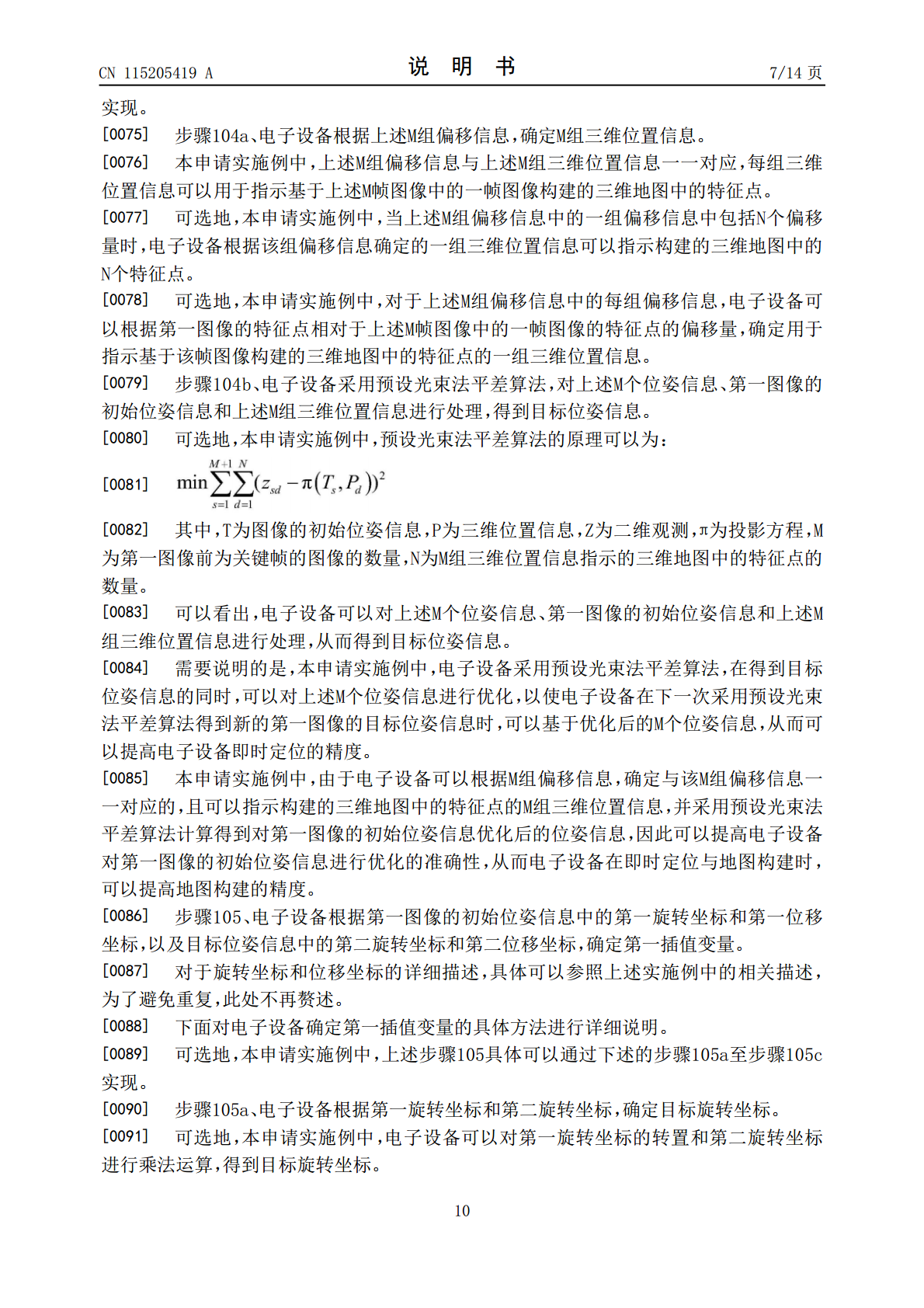
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
即时定位与地图构建方法、装置、电子设备及可读存储介质.pdf
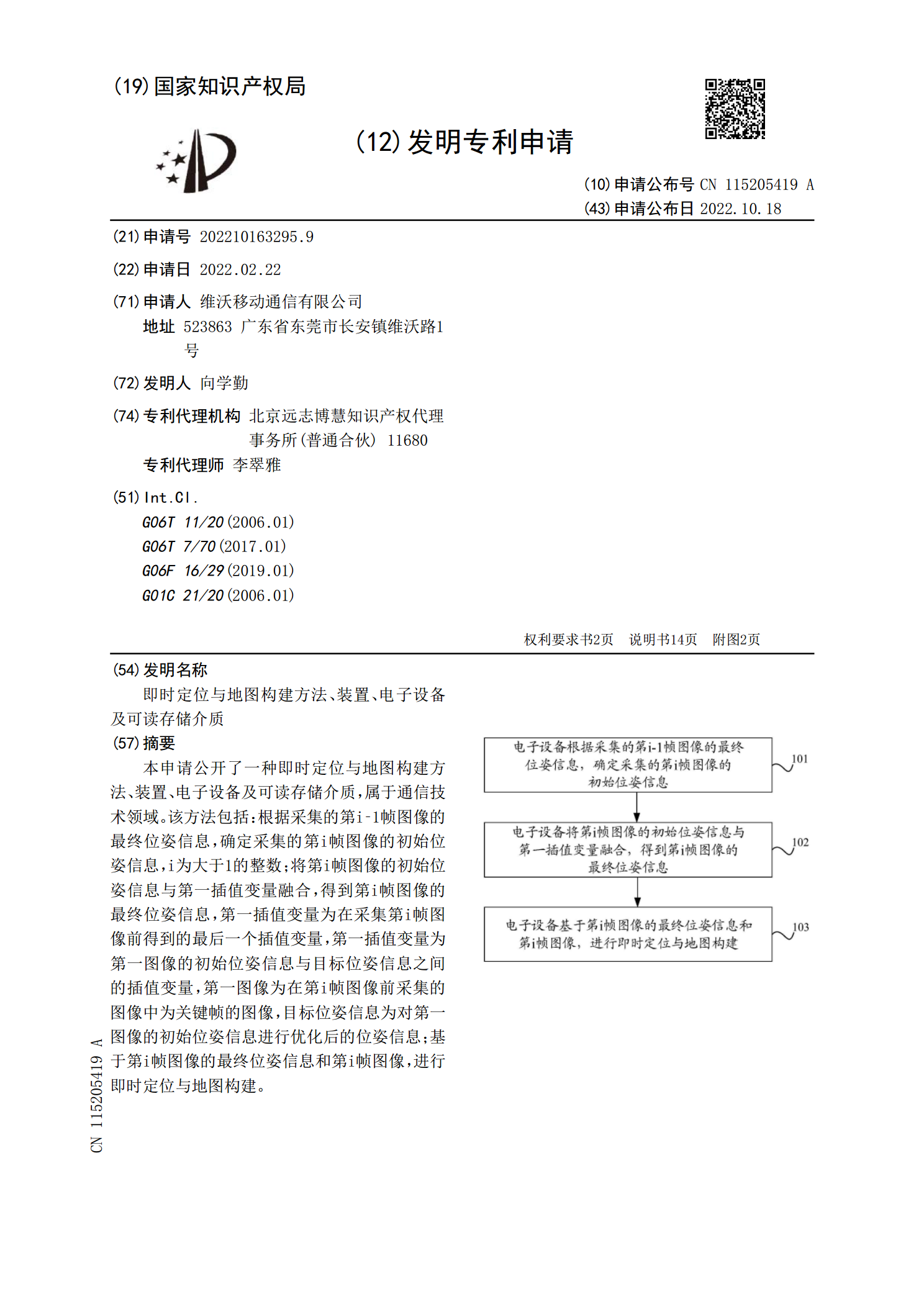
本申请公开了一种即时定位与地图构建方法、装置、电子设备及可读存储介质,属于通信技术领域。该方法包括:根据采集的第i?1帧图像的最终位姿信息,确定采集的第i帧图像的初始位姿信息,i为大于1的整数;将第i帧图像的初始位姿信息与第一插值变量融合,得到第i帧图像的最终位姿信息,第一插值变量为在采集第i帧图像前得到的最后一个插值变量,第一插值变量为第一图像的初始位姿信息与目标位姿信息之间的插值变量,第一图像为在第i帧图像前采集的图像中为关键帧的图像,目标位姿信息为对第一图像的初始位姿信息进行优化后的位姿信息;基于第

即时定位与地图构建方法、装置、终端设备及存储介质.pdf
本申请提供了一种即时定位与地图构建方法、装置、终端设备及存储介质。包括:将用户主动选取的图像帧作为最新关键帧加入关键帧序列;采用包含基于网格的运动统计算法与其他图像匹配算法的图像匹配策略,对最新关键帧与参考关键帧进行特征匹配,得到最新关键帧对应的特征匹配结果;根据最新关键帧对应的特征匹配结果生成环境地图及运动轨迹。用户能够主动选择确定最新关键帧,使得确定出的关键帧更具有代表性,提升后续依赖关键帧进行的定位和建图的精度,还能采用包含基于网格的运动统计算法和其他图像匹配算法的图像匹配策略对最新关键帧进行匹配,
定位方法、装置、电子设备及可读存储介质.pdf
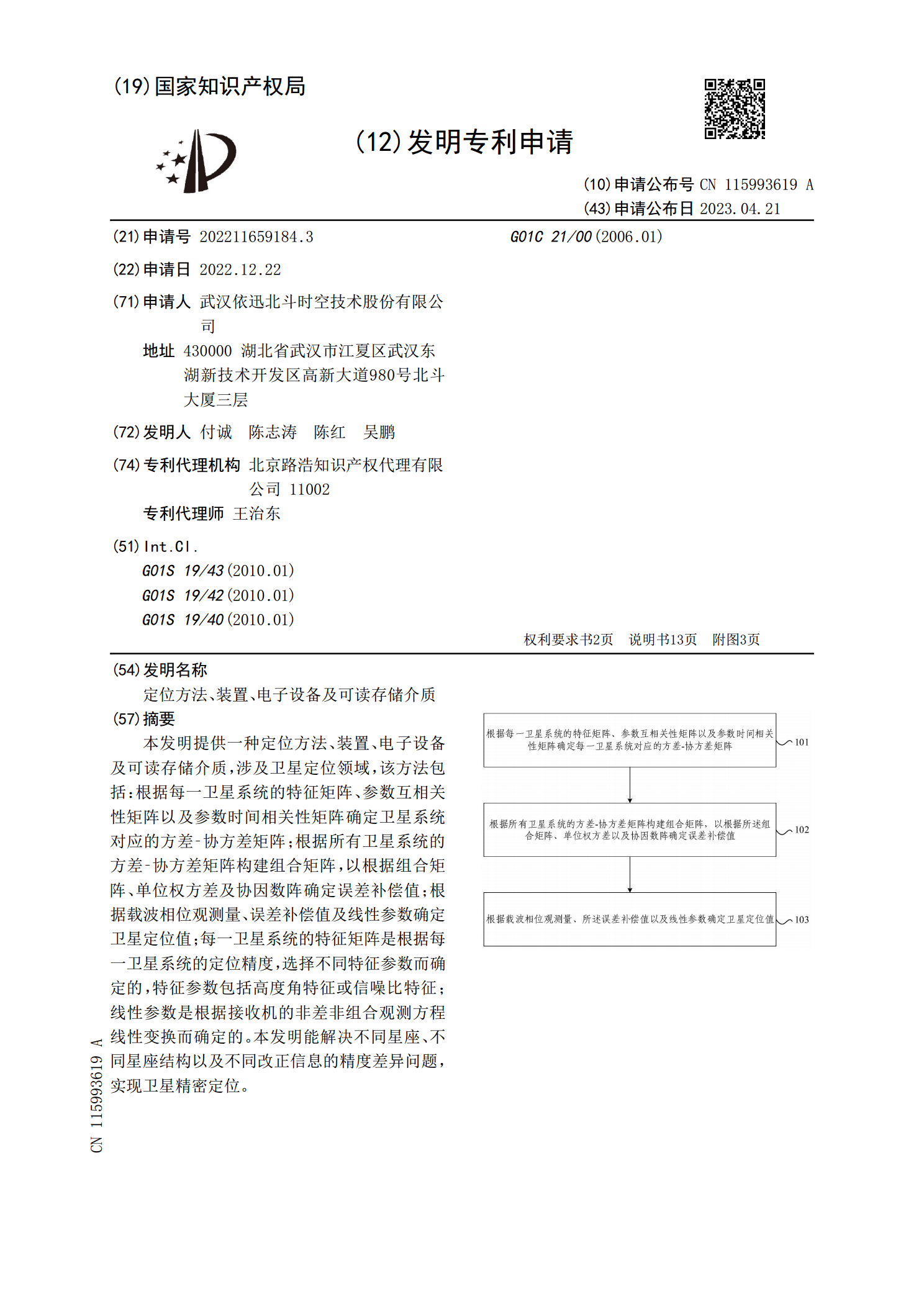
本发明提供一种定位方法、装置、电子设备及可读存储介质,涉及卫星定位领域,该方法包括:根据每一卫星系统的特征矩阵、参数互相关性矩阵以及参数时间相关性矩阵确定卫星系统对应的方差‑协方差矩阵;根据所有卫星系统的方差‑协方差矩阵构建组合矩阵,以根据组合矩阵、单位权方差及协因数阵确定误差补偿值;根据载波相位观测量、误差补偿值及线性参数确定卫星定位值;每一卫星系统的特征矩阵是根据每一卫星系统的定位精度,选择不同特征参数而确定的,特征参数包括高度角特征或信噪比特征;线性参数是根据接收机的非差非组合观测方程线性变换而确定

构建地图的方法、装置、电子设备及计算机可读存储介质.pdf
本申请涉及一种构建地图的方法、装置、电子设备及计算机可读存储介质,包括:获取至少一个鱼眼相机采集的图像数据、至少一个雷达传感器采集的雷达数据、轮速里程计采集到的轮速数据以及IMU数据,然后基于采集到的图像数据、轮速数据以及IMU数据,进行视觉地图建图,得到每路鱼眼相机对应的地图信息,以及,基于雷达数据进行毫米波建图,得到至少一个毫米波地图信息,然后基于图像数据以及每路鱼眼相机对应的地图信息进行目标检测以及语义分割处理,生成2D车位对象地图以及2D语义点云地图,然后基于每路鱼眼相机对应的地图信息、毫米波地图
即时通信方法、装置、电子设备及可读存储介质.pdf
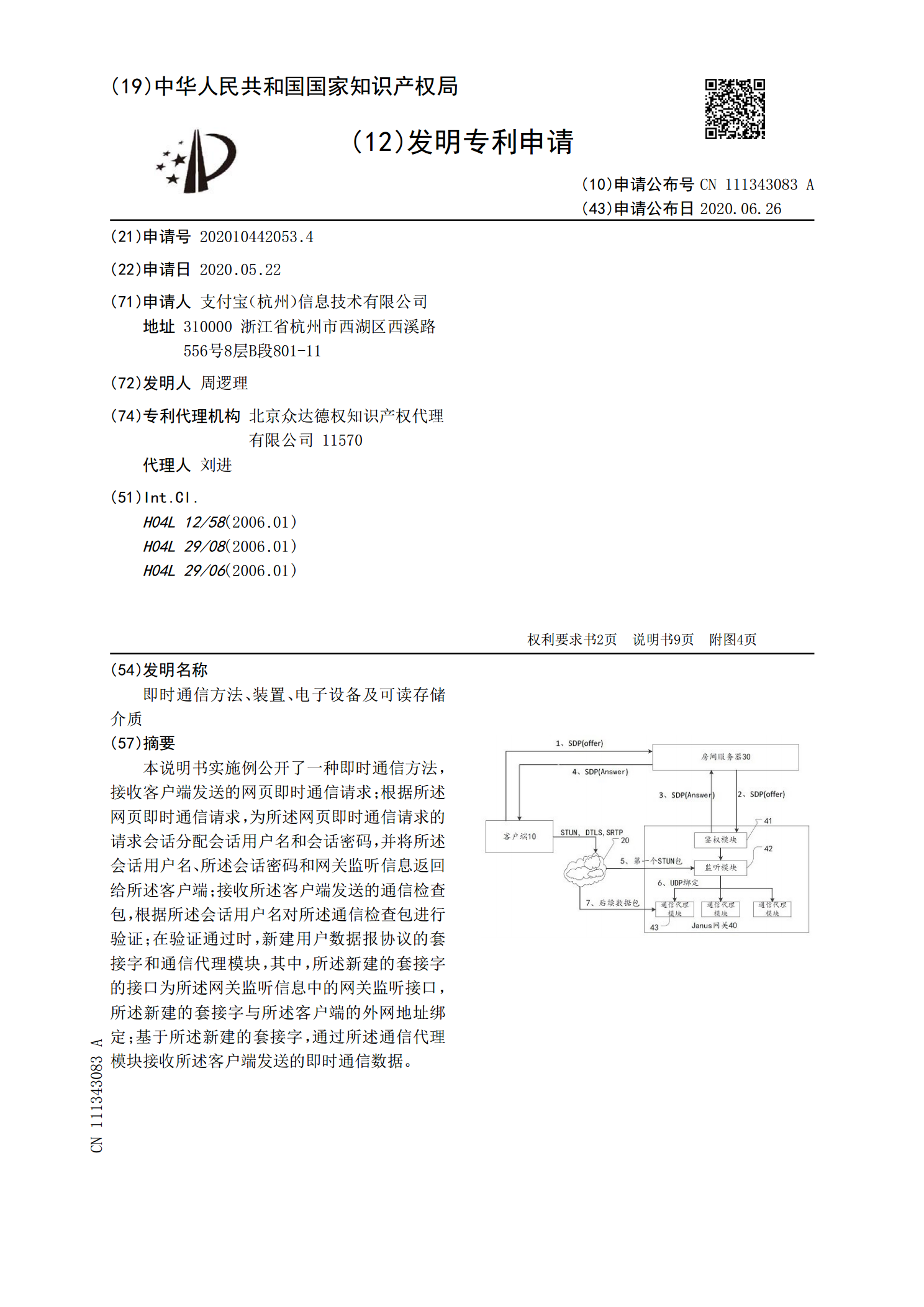
本说明书实施例公开了一种即时通信方法,接收客户端发送的网页即时通信请求;根据所述网页即时通信请求,为所述网页即时通信请求的请求会话分配会话用户名和会话密码,并将所述会话用户名、所述会话密码和网关监听信息返回给所述客户端;接收所述客户端发送的通信检查包,根据所述会话用户名对所述通信检查包进行验证;在验证通过时,新建用户数据报协议的套接字和通信代理模块,其中,所述新建的套接字的接口为所述网关监听信息中的网关监听接口,所述新建的套接字与所述客户端的外网地址绑定;基于所述新建的套接字,通过所述通信代理模块接收所述