
一种线结构光扫描仪标定方法、装置及存储介质.pdf

书生****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线结构光扫描仪标定方法、装置及存储介质.pdf
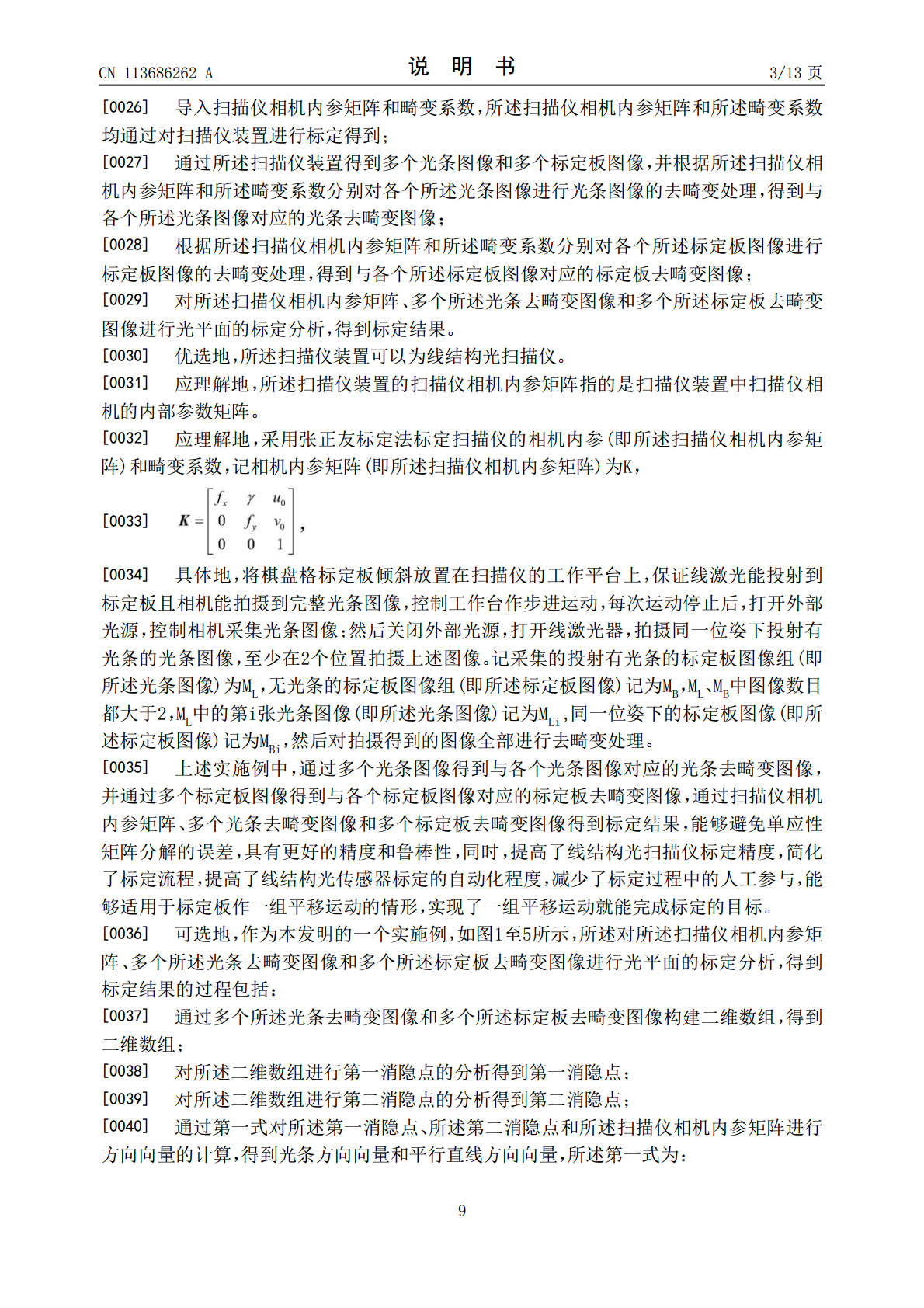
本发明提供一种线结构光扫描仪标定方法、装置及存储介质,方法包括:通过扫描仪相机内参矩阵和畸变系数分别对各个光条图像进行光条图像的去畸变处理得到与各个光条图像对应的光条去畸变图像,根据扫描仪相机内参矩阵和畸变系数分别对各个标定板图像进行标定板图像的去畸变处理得到与各个标定板图像对应的标定板去畸变图像。本发明能够避免单应性矩阵分解的误差,具有更好的精度和鲁棒性,同时,提高了线结构光扫描仪标定精度,简化了标定流程,提高了线结构光传感器标定的自动化程度,减少了标定过程中的人工参与,能够适用于标定板作一组平移运动的

一种线结构光中心线提取方法及存储介质.pdf
本发明请求保护一种线结构光中心线提取方法,本发明属于机器视觉技术领域,包括:对CCD工业相机采集到的图像进行剪裁、图像灰度化、图像增强、图像去噪、图像二值化、形态学开闭运算和图像光条区域分割等一系列的处理;采用细化算法进行细化处理,得到包含单像素光条中心线的图像;对Steger算法进行了改进。首先确定感兴趣区域,对该区域进行中值滤波;其次按照已确定的约束阈值和1×5的可行动模板在图像行上移动,找出粗略的中心点;然后通过高斯函数的可分离性及对称性求出Hessian矩阵;最后用泰勒二次展开得到亚像素级中心坐标
相机标定方法、装置、设备及存储介质.pdf
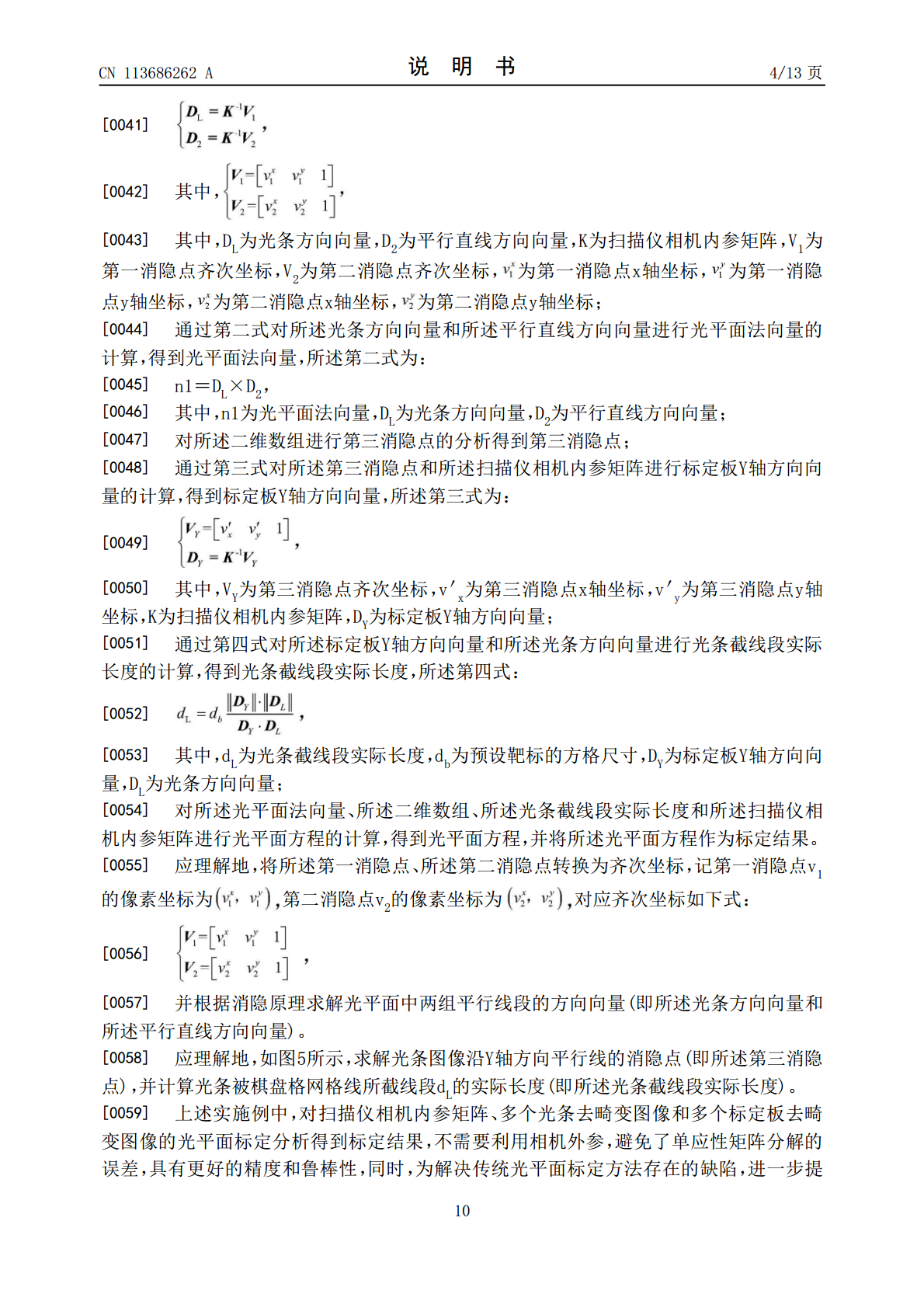
本申请公开了一种相机标定方法、装置、设备及存储介质,涉及图像处理技术领域。其中方法包括:获取待标定相机采集到的图卡的图卡图像,图卡由互相垂直的至少两个子图卡组成,任一子图卡中包括多个图案;根据图卡图像,分别确定图卡图像中每一图案图像的目标编码以及二维坐标位置,图案图像的目标编码互不相同;对于任一图案图像,根据第一映射数据以及图案图像的目标编码,确定图案图像的三维坐标位置,第一映射数据中包括图案图像的目标编码与三维坐标间的一一对应关系;根据每一图案图像的二维坐标位置以及三维坐标位置,确定相机参数。
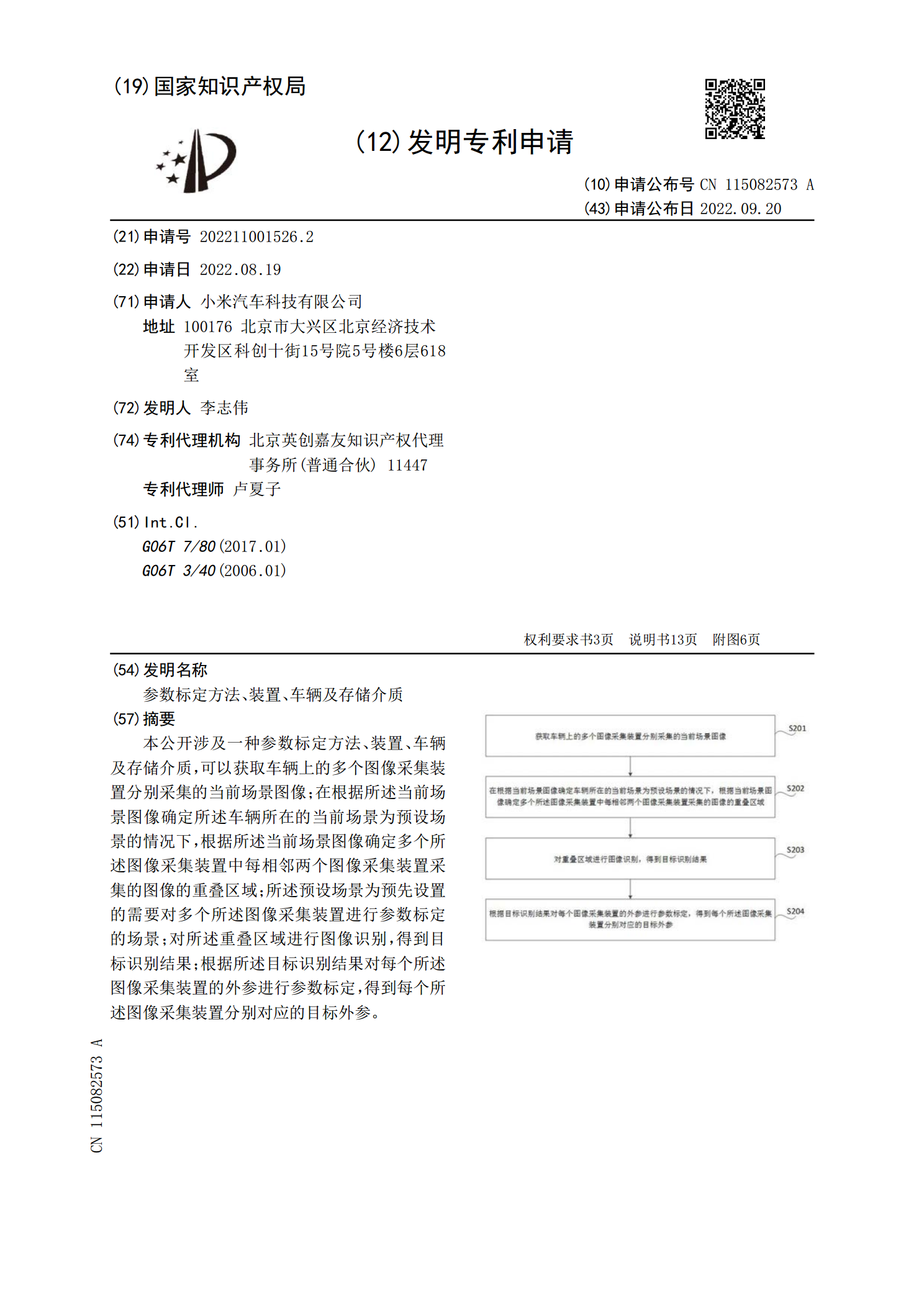
参数标定方法、装置、车辆及存储介质.pdf
本公开涉及一种参数标定方法、装置、车辆及存储介质,可以获取车辆上的多个图像采集装置分别采集的当前场景图像;在根据所述当前场景图像确定所述车辆所在的当前场景为预设场景的情况下,根据所述当前场景图像确定多个所述图像采集装置中每相邻两个图像采集装置采集的图像的重叠区域;所述预设场景为预先设置的需要对多个所述图像采集装置进行参数标定的场景;对所述重叠区域进行图像识别,得到目标识别结果;根据所述目标识别结果对每个所述图像采集装置的外参进行参数标定,得到每个所述图像采集装置分别对应的目标外参。
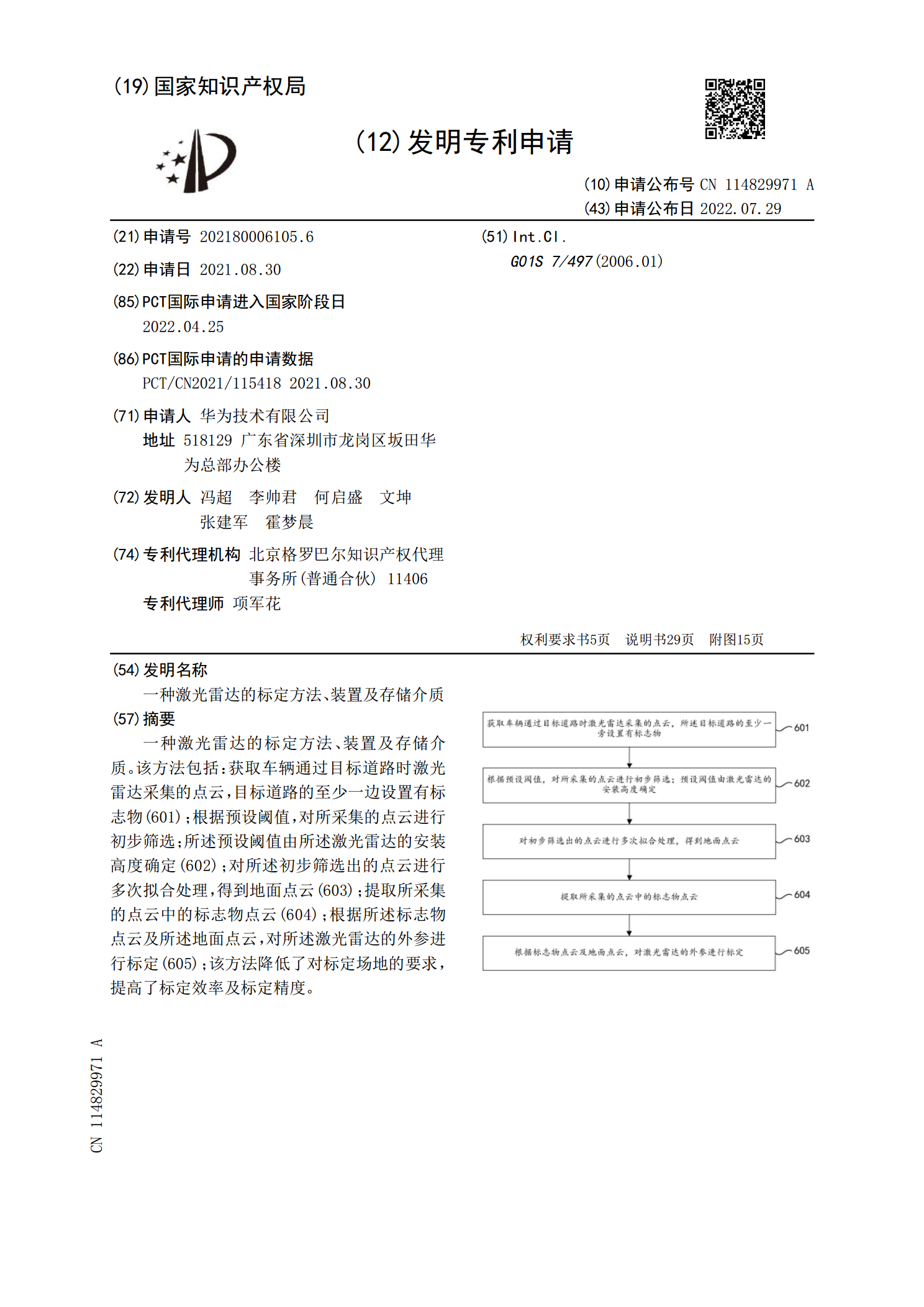
一种激光雷达的标定方法、装置及存储介质.pdf
一种激光雷达的标定方法、装置及存储介质。该方法包括:获取车辆通过目标道路时激光雷达采集的点云,目标道路的至少一边设置有标志物(601);根据预设阈值,对所采集的点云进行初步筛选;所述预设阈值由所述激光雷达的安装高度确定(602);对所述初步筛选出的点云进行多次拟合处理,得到地面点云(603);提取所采集的点云中的标志物点云(604);根据所述标志物点云及所述地面点云,对所述激光雷达的外参进行标定(605);该方法降低了对标定场地的要求,提高了标定效率及标定精度。