
一种线结构光中心线提取方法及存储介质.pdf

睿达****的的


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种线结构光中心线提取方法及存储介质.pdf
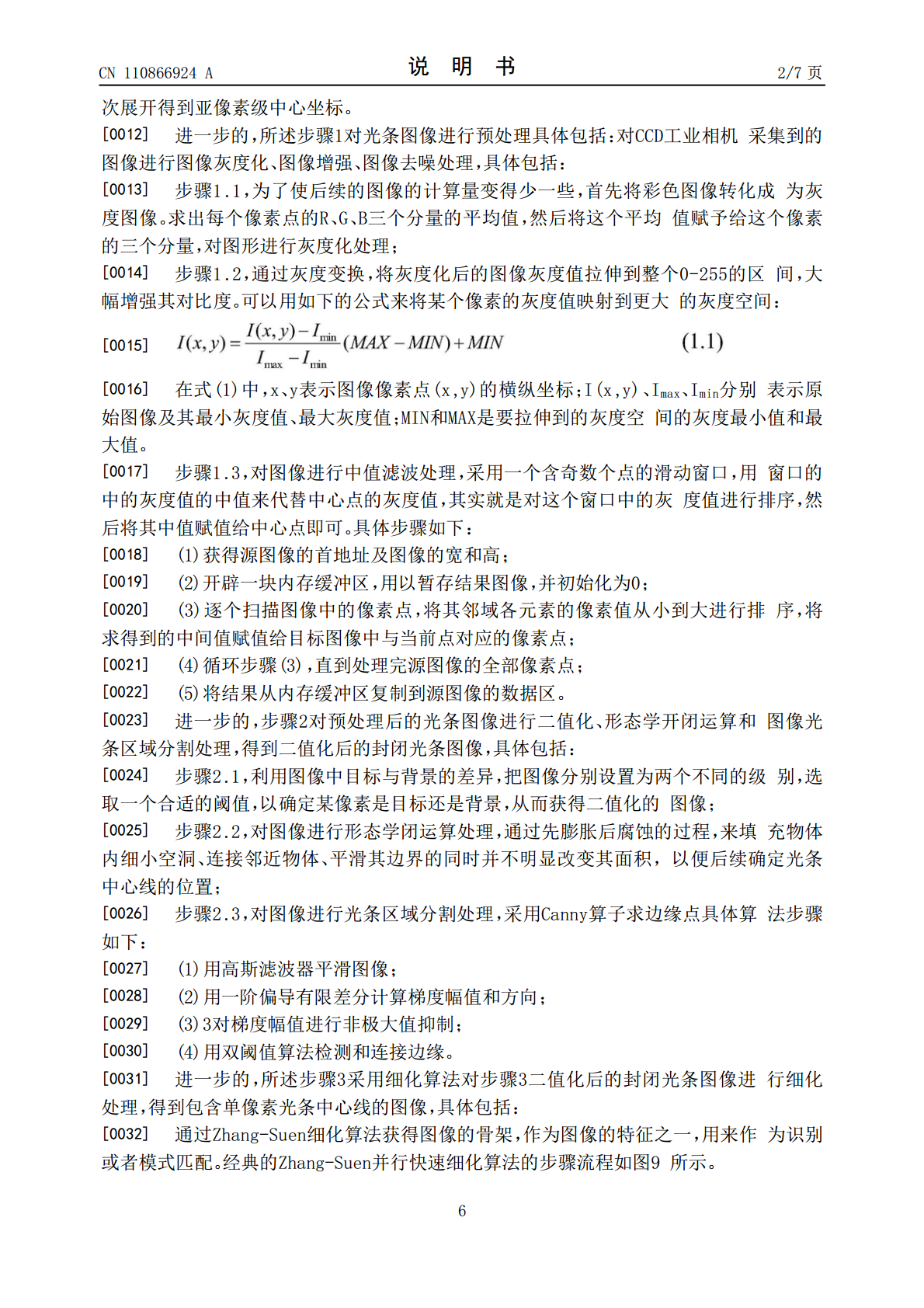
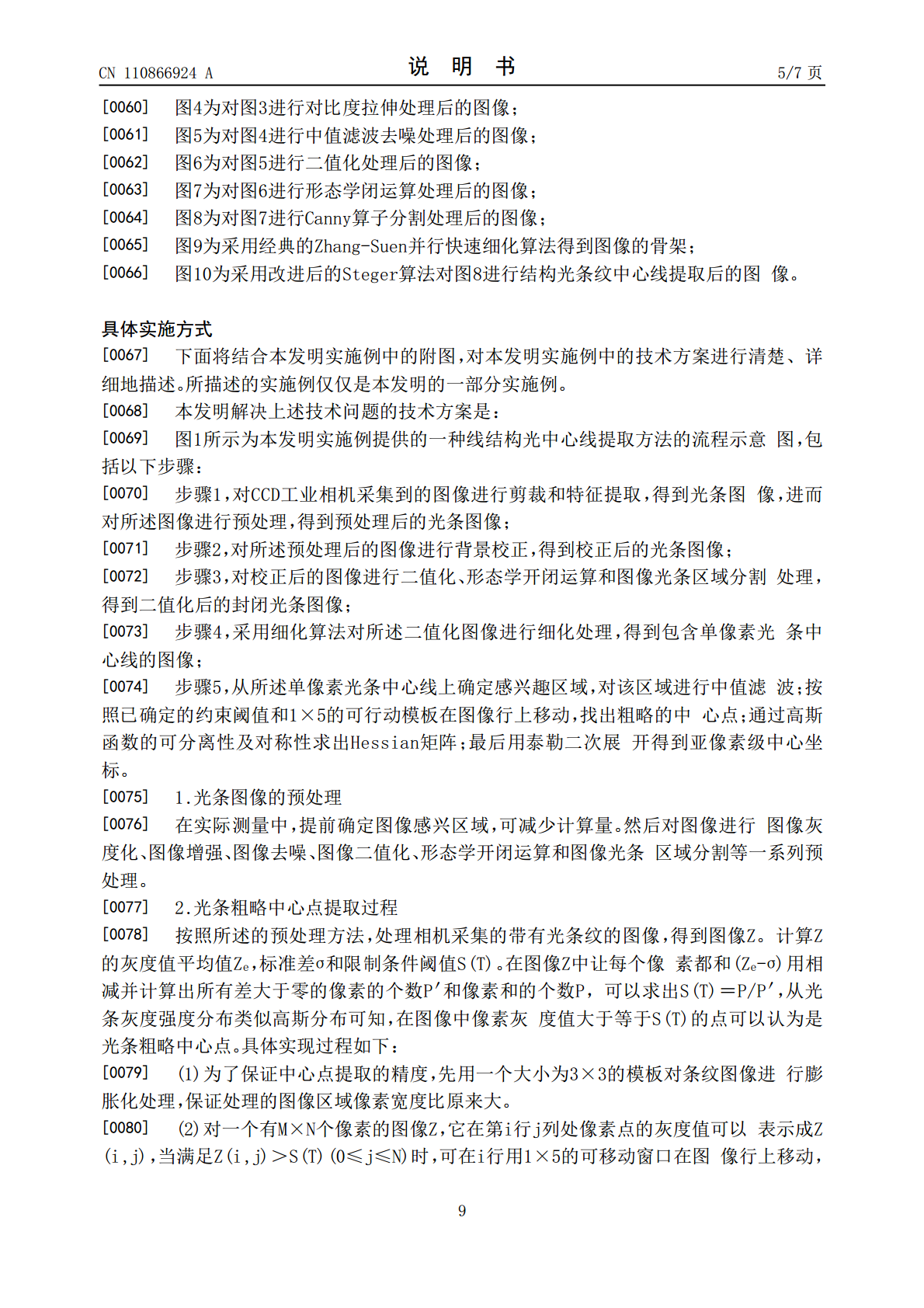
本发明请求保护一种线结构光中心线提取方法,本发明属于机器视觉技术领域,包括:对CCD工业相机采集到的图像进行剪裁、图像灰度化、图像增强、图像去噪、图像二值化、形态学开闭运算和图像光条区域分割等一系列的处理;采用细化算法进行细化处理,得到包含单像素光条中心线的图像;对Steger算法进行了改进。首先确定感兴趣区域,对该区域进行中值滤波;其次按照已确定的约束阈值和1×5的可行动模板在图像行上移动,找出粗略的中心点;然后通过高斯函数的可分离性及对称性求出Hessian矩阵;最后用泰勒二次展开得到亚像素级中心坐标
支气管中心线提取方法及其系统和存储介质.pdf
本申请提供一种建立支气管中心线提取模型的方法,包括(a)获取支气管二值掩码和人工标注的真实支气管中心线;(b)将所述支气管二值掩码输入到三维FCN中,通过编码器、解码器网络,得到支气管的预测端点;(c)根据所得到的支气管的预测端点,确定初始中心线;(d)通过编码器对初始中心线进行采样,将采样得到的特征输入一维FCN,输出预测中心线;(e)根据预测的端点及预测中心线,以人工标注的真实支气管中心线作为金标准计算损失,并更新网络权重;(f)重复步骤(a)至(e),直至获得符合预期的模型参数,建立支气管中心线提取
一种道路中心线的提取方法、装置、电子设备及存储介质.pdf
本发明实施例公开了一种道路中心线的提取方法、装置、电子设备及存储介质。所述方法包括:根据预先获取的当前导航区域中的各个像素点的位置和像素值,确定所述当前导航区域对应的初始道路图像;其中,所述初始道路图像中包括至少一个初始道路轮廓;将所述初始道路图像中的各个初始道路轮廓切分为与其对应的至少两个道路子轮廓;其中,各个道路子轮廓中包括一个重心位置;根据各个初始道路轮廓对应的各个道路子轮廓的重心位置,确定出各个初始道路轮廓的道路中心线。不仅可以准确地提取出道路中心线,而且还可以节省提取时间,提高提取效率。

一种提取焊缝中心线的方法.pdf
本发明涉及一种提取焊缝中心线的方法,包括:获取焊缝的原始图像;对所述原始图像进行同态滤波,获得削弱光照影响的灰度图像;对所述灰度图像进行局部阈值二值化处理得到二值图像;对局部阈值二值化处理后的二值图像进行形态学操作;将处理后的二值图像进行连通域处理,提取最大连通域,得仅保留焊缝的二值图像;使用距离变换函数将二值图像变换为凸显出焊缝中心线的灰度图像;对处理得到的灰度图像进行局部阈值二值化处理,得到保留焊缝中心线的二值图像;对处理得到的保留焊缝中心线的二值图像进行形态学处理和连通域处理,提取焊缝中心线。本发明
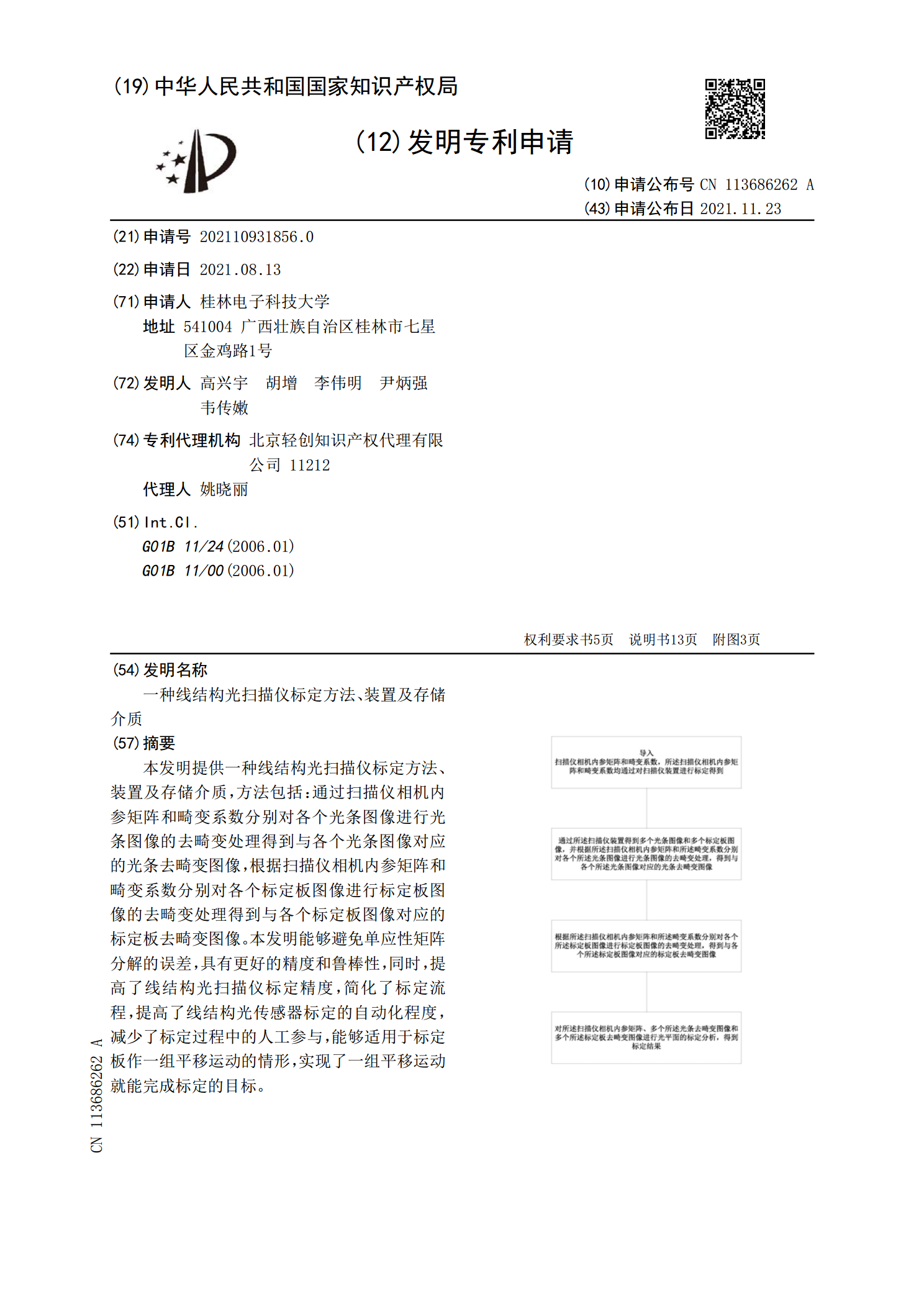
一种线结构光扫描仪标定方法、装置及存储介质.pdf
本发明提供一种线结构光扫描仪标定方法、装置及存储介质,方法包括:通过扫描仪相机内参矩阵和畸变系数分别对各个光条图像进行光条图像的去畸变处理得到与各个光条图像对应的光条去畸变图像,根据扫描仪相机内参矩阵和畸变系数分别对各个标定板图像进行标定板图像的去畸变处理得到与各个标定板图像对应的标定板去畸变图像。本发明能够避免单应性矩阵分解的误差,具有更好的精度和鲁棒性,同时,提高了线结构光扫描仪标定精度,简化了标定流程,提高了线结构光传感器标定的自动化程度,减少了标定过程中的人工参与,能够适用于标定板作一组平移运动的