
相机标定方法、装置、设备及存储介质.pdf

冬易****娘子


1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
相机标定方法、装置、设备及存储介质.pdf
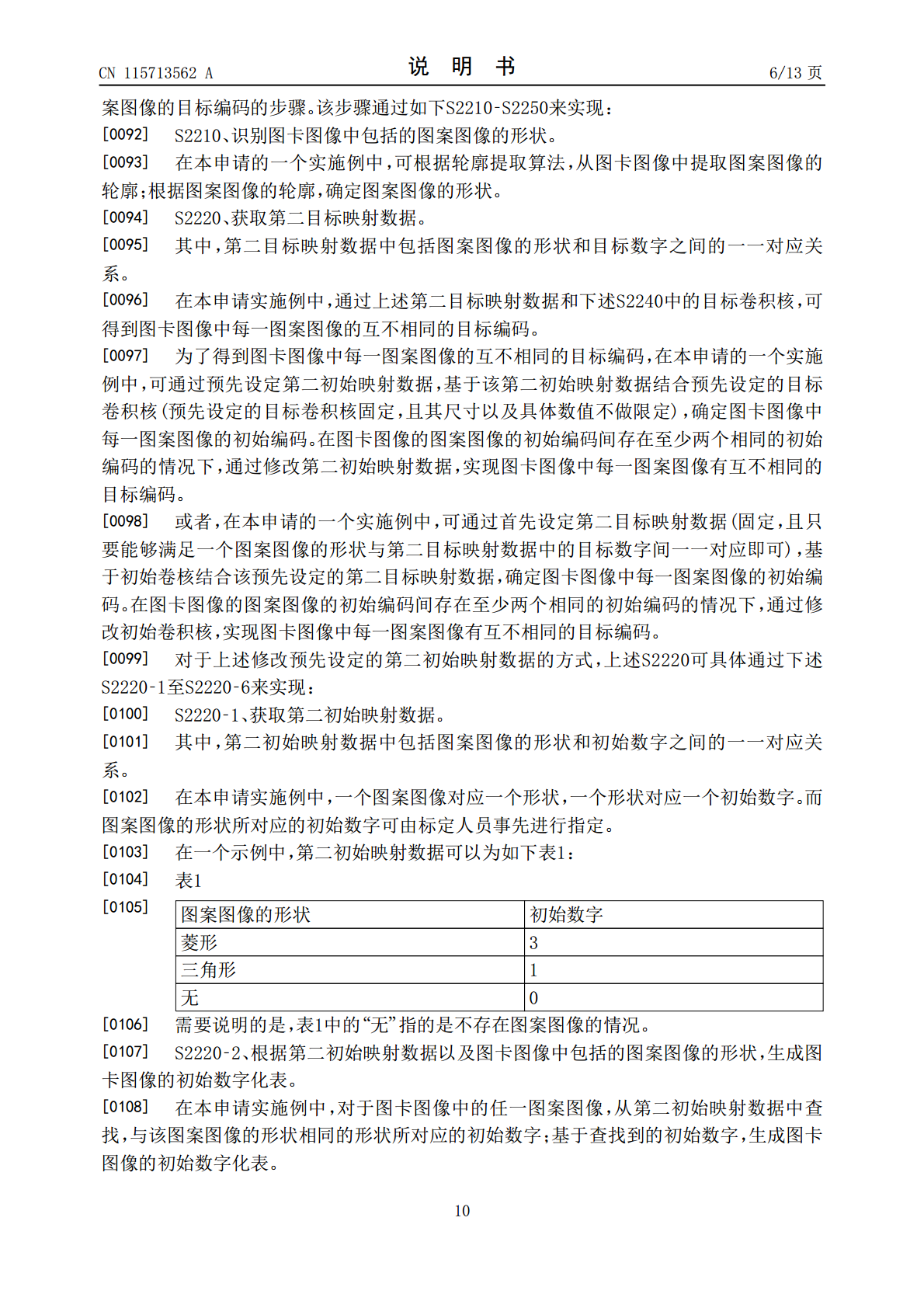
本申请公开了一种相机标定方法、装置、设备及存储介质,涉及图像处理技术领域。其中方法包括:获取待标定相机采集到的图卡的图卡图像,图卡由互相垂直的至少两个子图卡组成,任一子图卡中包括多个图案;根据图卡图像,分别确定图卡图像中每一图案图像的目标编码以及二维坐标位置,图案图像的目标编码互不相同;对于任一图案图像,根据第一映射数据以及图案图像的目标编码,确定图案图像的三维坐标位置,第一映射数据中包括图案图像的目标编码与三维坐标间的一一对应关系;根据每一图案图像的二维坐标位置以及三维坐标位置,确定相机参数。
相机标定方法、装置、设备及存储介质.pdf
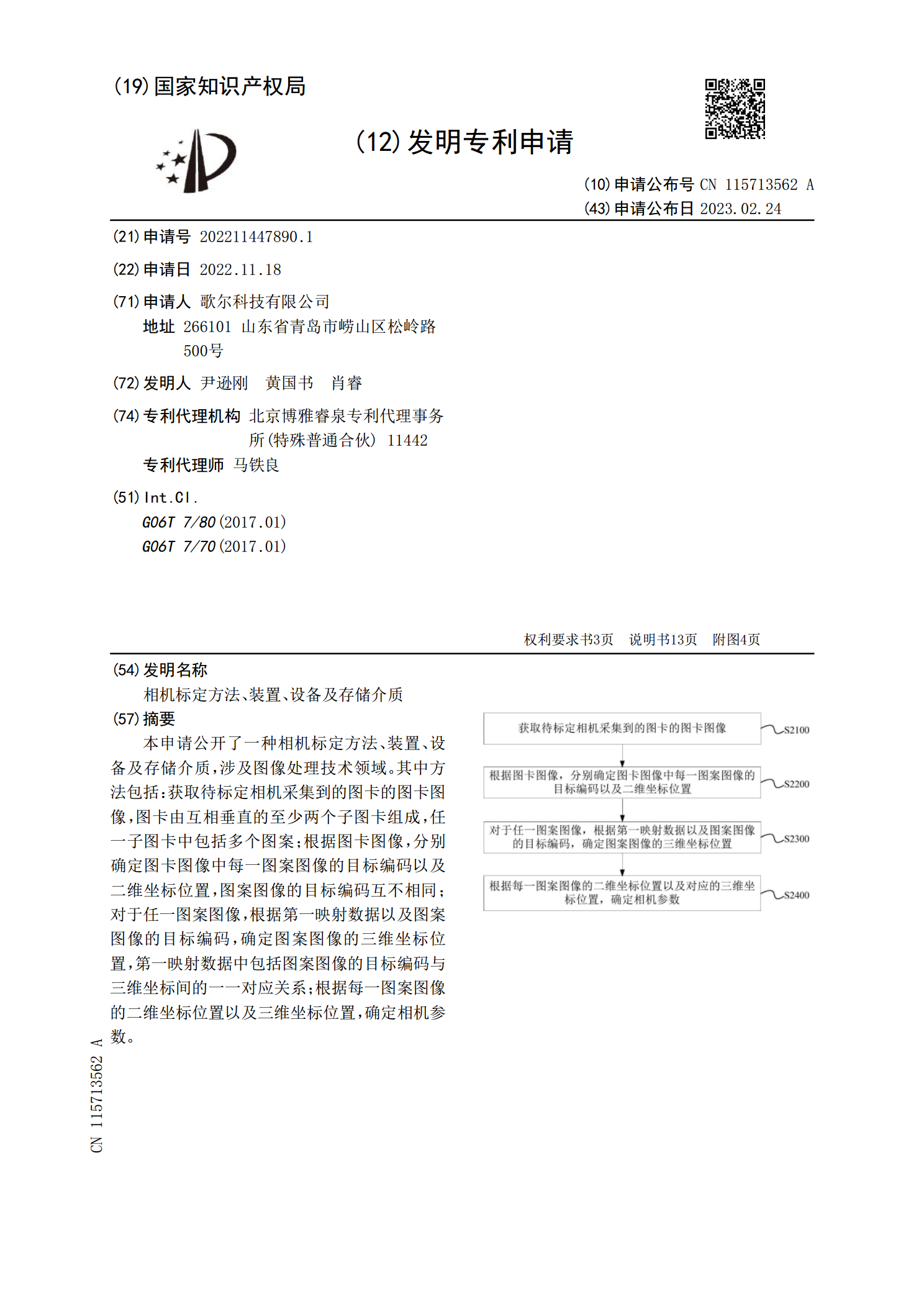
本申请公开了一种相机标定方法、装置、设备及存储介质,属于计算机视觉领域,方法包括:首先获取目标物体从待标定相机不同位姿拍摄到的目标图像集合,并选取相邻序列的两张目标图像的作为初始图像对进行特征点提取与特征点匹配,得到特征点对;根据特征点对得到基础矩阵F;根据基础矩阵F得到初始图像对的初始三维点集;根据目标图像集合中的其他图像通过光束法平差对初始三维点集进行优化,得到优化后的所述待标定相机的参数。相比于现有技术来说,本申请实施例提供的相机标定方法有较高的精度和鲁棒性。
相机标定方法、装置、电子设备及存储介质.pdf
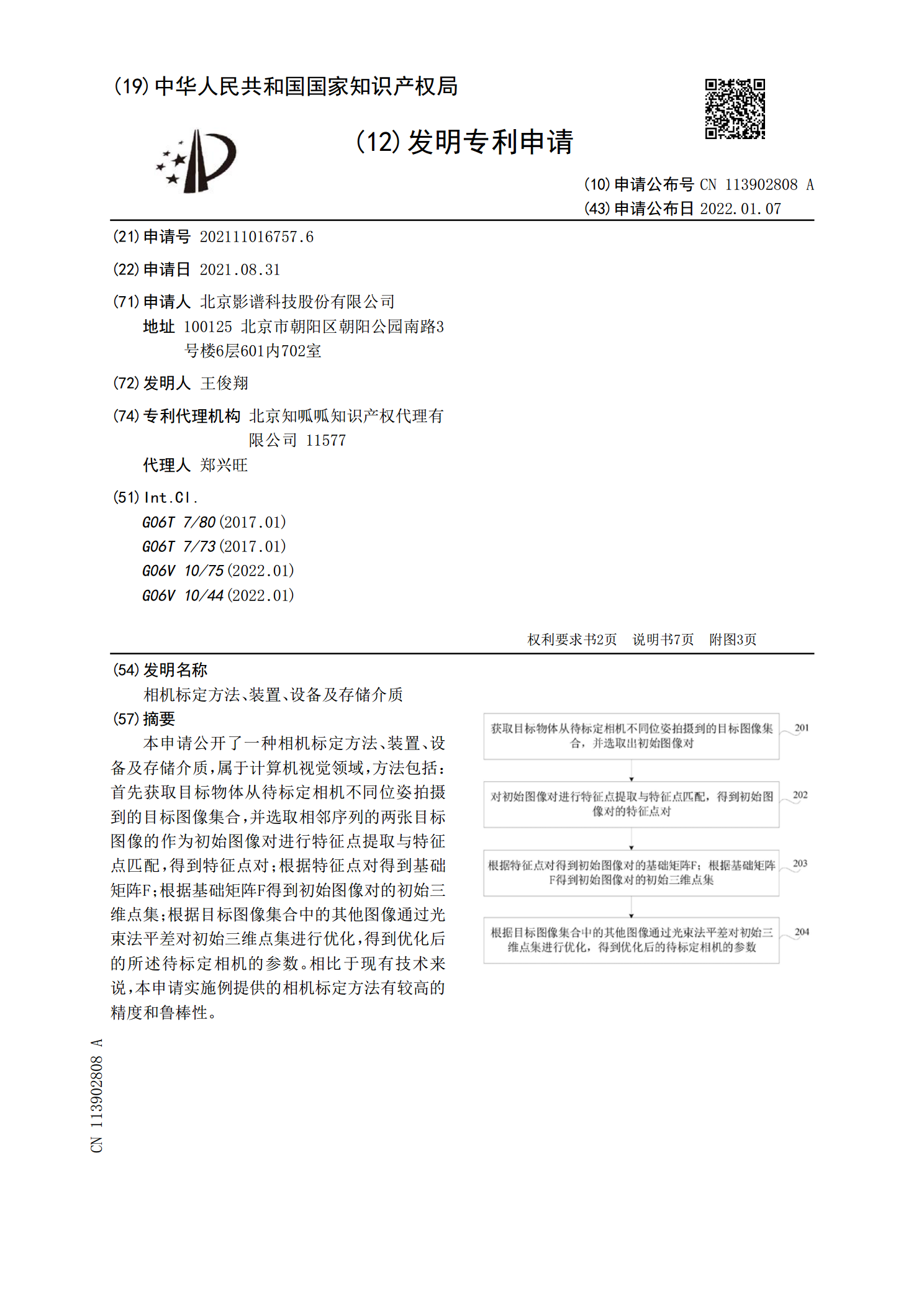
本申请提供一种相机标定方法、装置、电子设备及存储介质,包括:获取第一图像中至少两个目标所在区域的检测框的信息;第一图像为相机在第一时刻拍摄到的图像;每个检测框的信息包括对应的检测框在第一图像中的位置和尺寸;根据至少两个目标的检测框的信息,确定出第一线性参数组;第一线性参数组用于表征检测框在第一图像中的位置和尺寸之间的线性关系;在预先确定的线性参数组和相机参数组的对应关系中存在该第一线性参数组时,从对应关系中查找出与第一线性参数组对应的第一相机参数组;第一相机参数组包括相机的架设高度、相机的俯仰角和相机的焦

相机标定方法、装置、设备及介质.pdf
本申请公开了一种相机标定方法、装置、设备及介质,属于摄像技术领域。相机标定方法包括:获取第一相机、第二相机和第三相机分别对于目标场景拍摄得到的第一图像、第二图像和第三图像,其中,第一相机为云台相机;提取第一图像和第二图像的特征点;匹配第一图像的特征点和第二图像的特征点,得到多个特征点对;根据第二图像和第三图像,确定目标场景在第二相机对应的坐标系中的目标深度信息;根据第一相机的初始内参、第一相机和第二相机之间的初始外参、多个特征点对和目标深度信息,确定第一相机的目标内参、第一相机和第二相机之间的目标外参。
深度相机外参自标定方法、装置、设备及存储介质.pdf
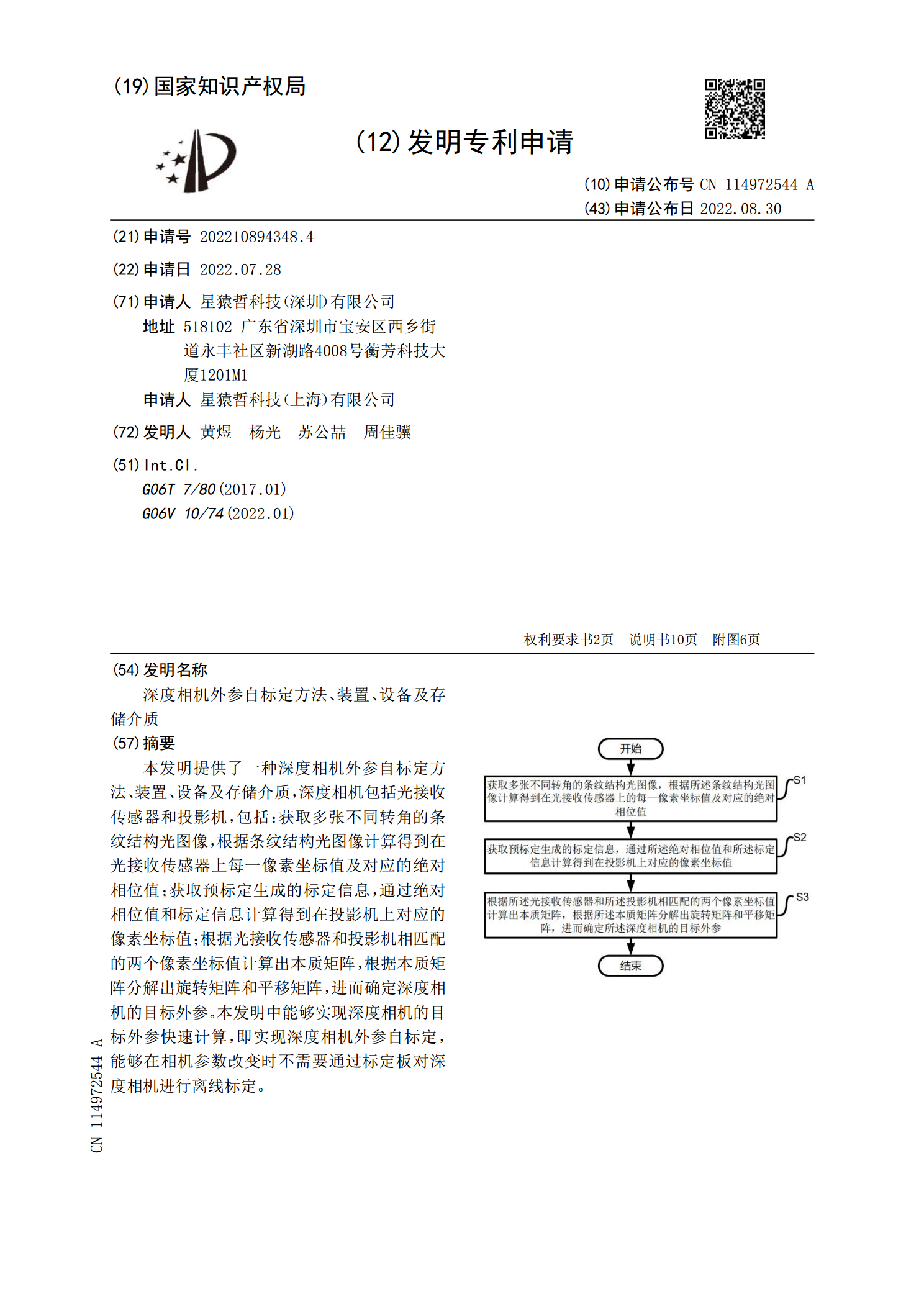
本发明提供了一种深度相机外参自标定方法、装置、设备及存储介质,深度相机包括光接收传感器和投影机,包括:获取多张不同转角的条纹结构光图像,根据条纹结构光图像计算得到在光接收传感器上每一像素坐标值及对应的绝对相位值;获取预标定生成的标定信息,通过绝对相位值和标定信息计算得到在投影机上对应的像素坐标值;根据光接收传感器和投影机相匹配的两个像素坐标值计算出本质矩阵,根据本质矩阵分解出旋转矩阵和平移矩阵,进而确定深度相机的目标外参。本发明中能够实现深度相机的目标外参快速计算,即实现深度相机外参自标定,能够在相机参数