
一种回转构件表面缺陷检测装置、检测方法及标定方法.pdf

哲妍****彩妍

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
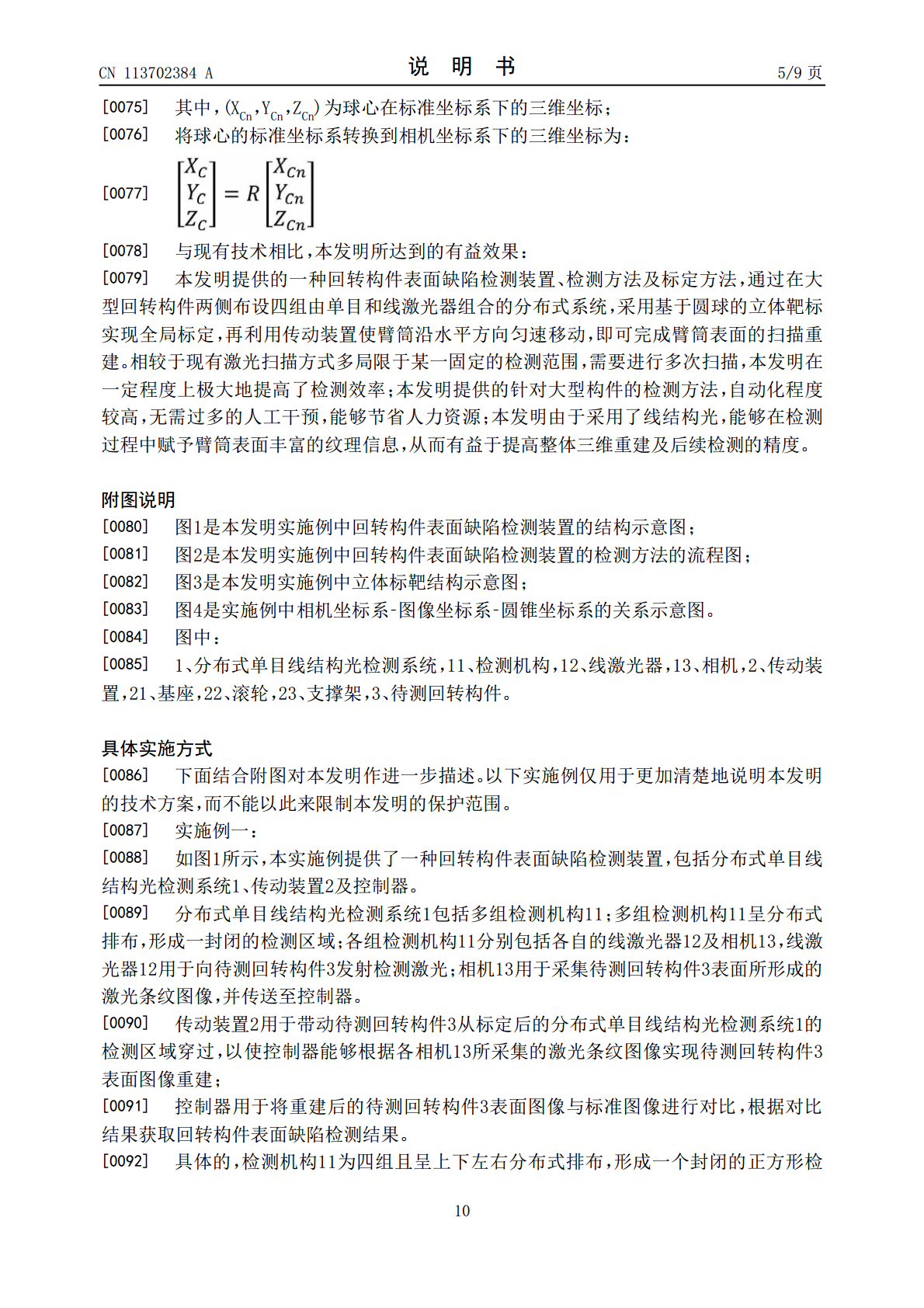
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种回转构件表面缺陷检测装置、检测方法及标定方法.pdf
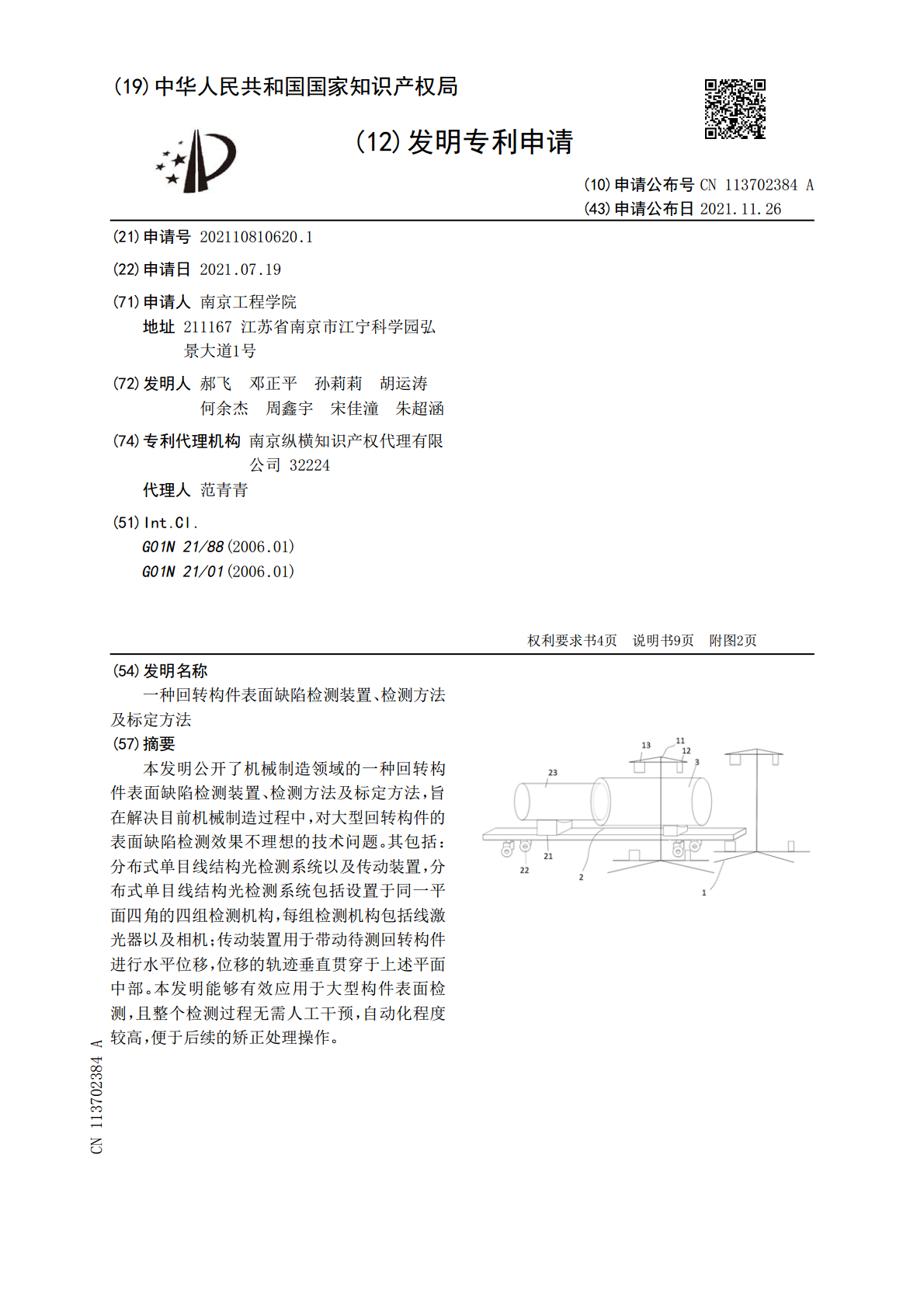
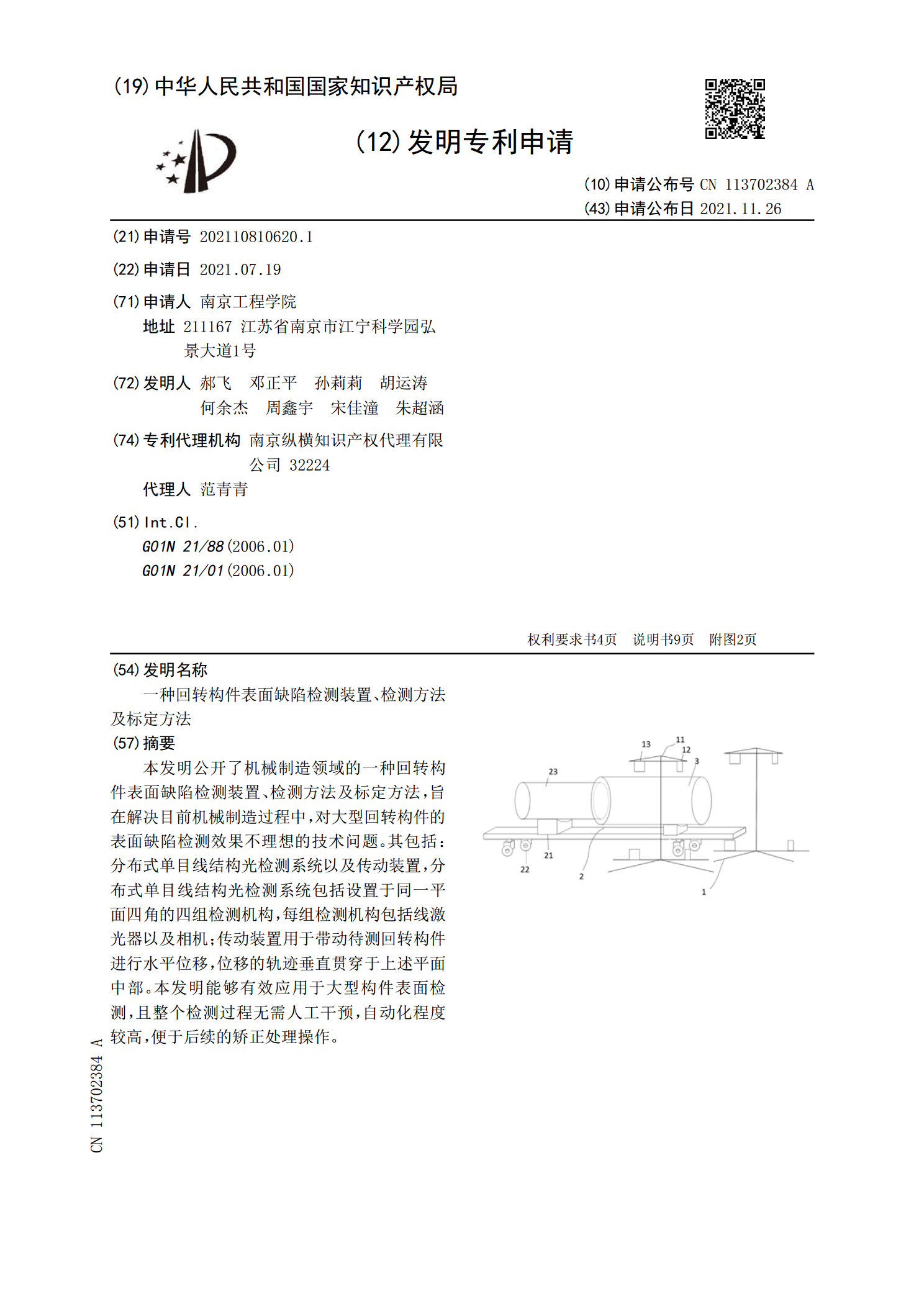
本发明公开了机械制造领域的一种回转构件表面缺陷检测装置、检测方法及标定方法,旨在解决目前机械制造过程中,对大型回转构件的表面缺陷检测效果不理想的技术问题。其包括:分布式单目线结构光检测系统以及传动装置,分布式单目线结构光检测系统包括设置于同一平面四角的四组检测机构,每组检测机构包括线激光器以及相机;传动装置用于带动待测回转构件进行水平位移,位移的轨迹垂直贯穿于上述平面中部。本发明能够有效应用于大型构件表面检测,且整个检测过程无需人工干预,自动化程度较高,便于后续的矫正处理操作。
一种检测回转体表面缺陷的装置及其检测方法.pdf
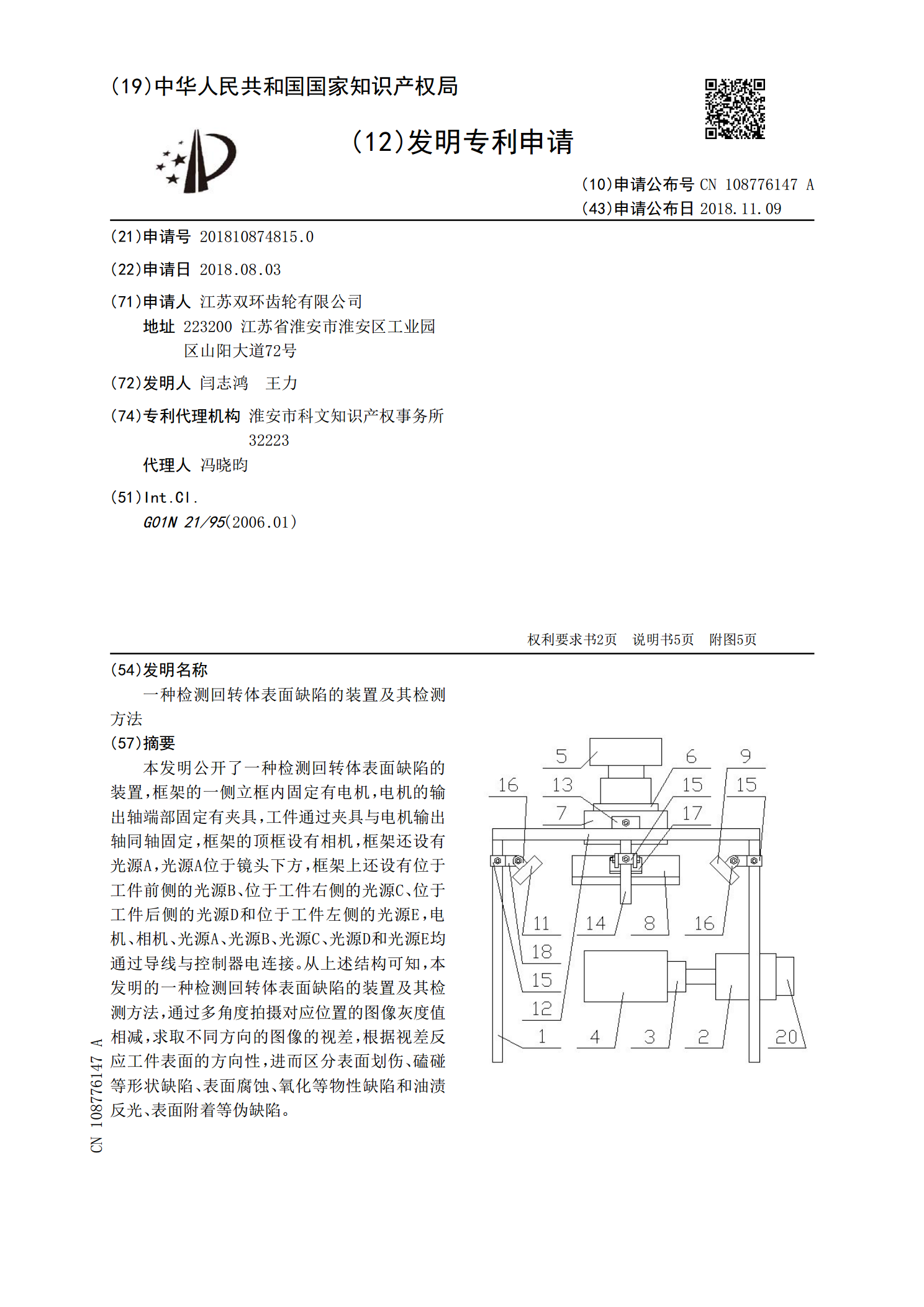
本发明公开了一种检测回转体表面缺陷的装置,框架的一侧立框内固定有电机,电机的输出轴端部固定有夹具,工件通过夹具与电机输出轴同轴固定,框架的顶框设有相机,框架还设有光源A,光源A位于镜头下方,框架上还设有位于工件前侧的光源B、位于工件右侧的光源C、位于工件后侧的光源D和位于工件左侧的光源E,电机、相机、光源A、光源B、光源C、光源D和光源E均通过导线与控制器电连接。从上述结构可知,本发明的一种检测回转体表面缺陷的装置及其检测方法,通过多角度拍摄对应位置的图像灰度值相减,求取不同方向的图像的视差,根据视差反应

表面缺陷检测装置及表面缺陷检测方法.pdf
一种表面缺陷检测装置及表面缺陷检测方法。对于钢材的表面的检查对象部位,从彼此向相反侧倾斜的方向以大致相同的入射角度,分别照射能够区分的第1及第2照明光,并分别拍摄被第1照明光照明的检查对象部位的第1图像及被第2照明光照明的检查对象部位的第2图像。生成该第1图像与第2图像的差分图像,并从差分图像的亮部及暗部中,基于沿着与第1或第2照明光的照射方向对应的规定方向的亮部及暗部的序列,将检查对象部位中的凸状部的亮部及暗部的组合去除,再基于该去除处理后留下的亮部及暗部的形状特征量或沿着规定方向的序列,来判定检查对象
一种表面缺陷检测方法及检测装置.pdf
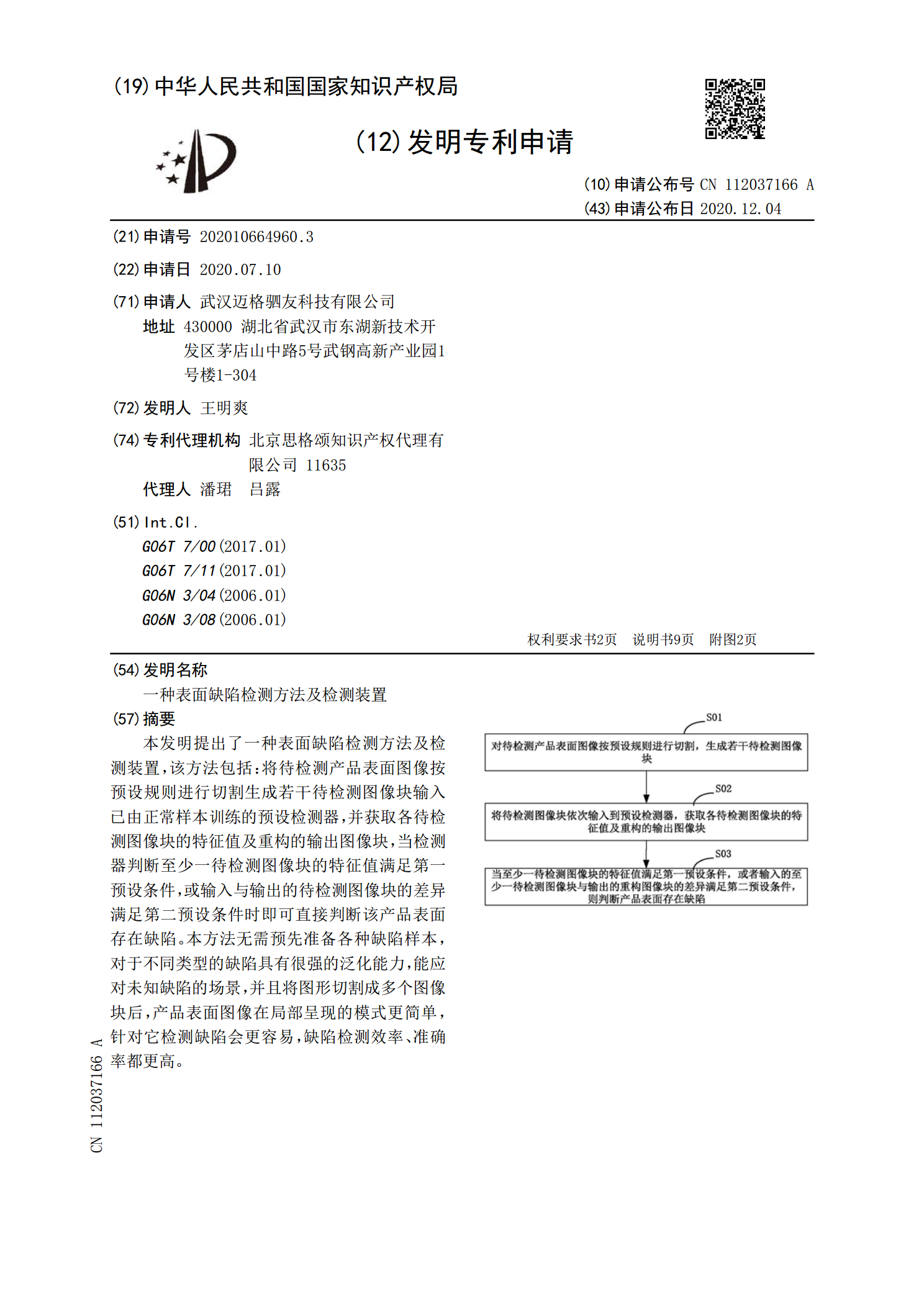
本发明提出了一种表面缺陷检测方法及检测装置,该方法包括:将待检测产品表面图像按预设规则进行切割生成若干待检测图像块输入已由正常样本训练的预设检测器,并获取各待检测图像块的特征值及重构的输出图像块,当检测器判断至少一待检测图像块的特征值满足第一预设条件,或输入与输出的待检测图像块的差异满足第二预设条件时即可直接判断该产品表面存在缺陷。本方法无需预先准备各种缺陷样本,对于不同类型的缺陷具有很强的泛化能力,能应对未知缺陷的场景,并且将图形切割成多个图像块后,产品表面图像在局部呈现的模式更简单,针对它检测缺陷会更
一种回转体构件表面状态精细检测方法及其系统.pdf
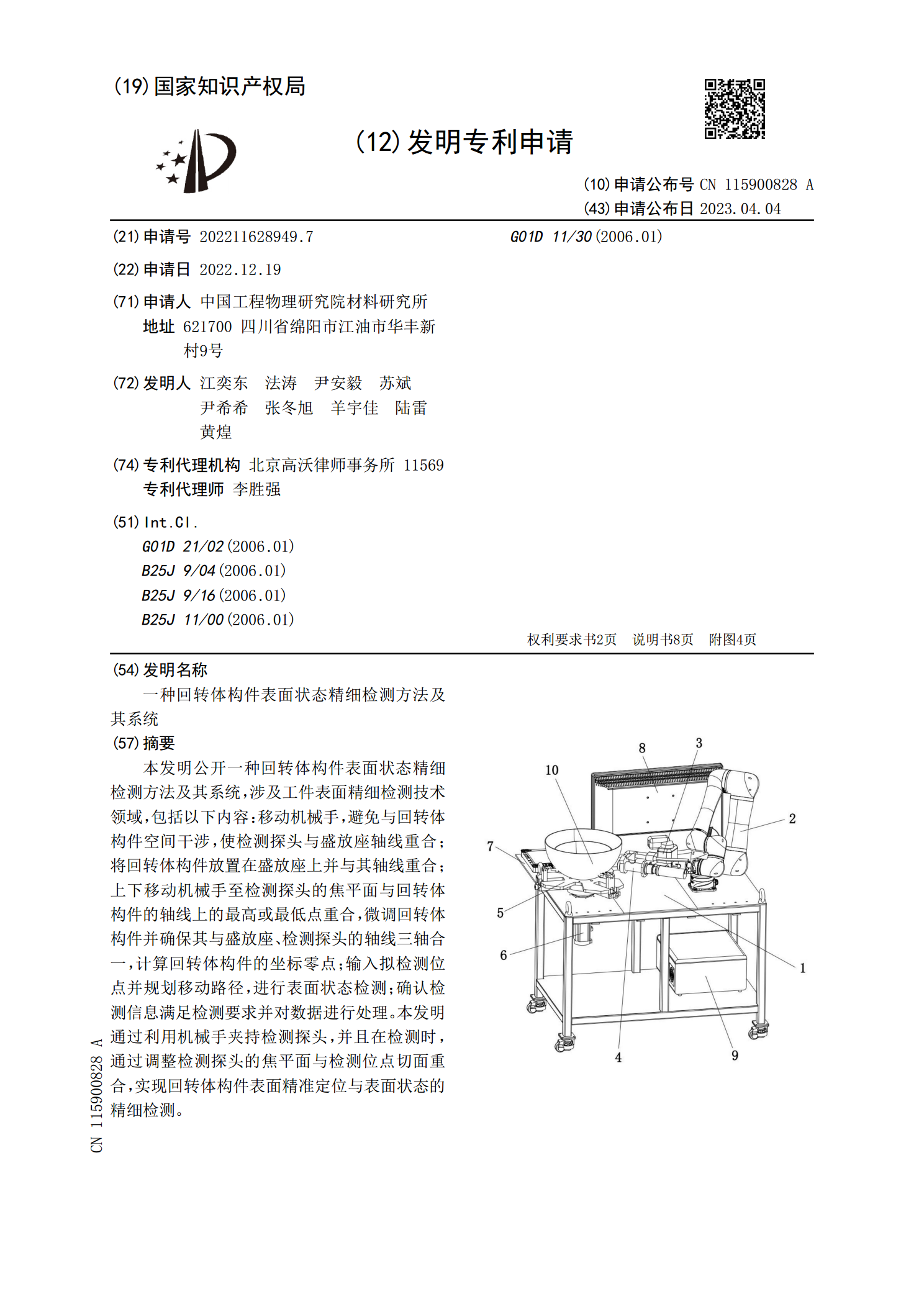
本发明公开一种回转体构件表面状态精细检测方法及其系统,涉及工件表面精细检测技术领域,包括以下内容:移动机械手,避免与回转体构件空间干涉,使检测探头与盛放座轴线重合;将回转体构件放置在盛放座上并与其轴线重合;上下移动机械手至检测探头的焦平面与回转体构件的轴线上的最高或最低点重合,微调回转体构件并确保其与盛放座、检测探头的轴线三轴合一,计算回转体构件的坐标零点;输入拟检测位点并规划移动路径,进行表面状态检测;确认检测信息满足检测要求并对数据进行处理。本发明通过利用机械手夹持检测探头,并且在检测时,通过调整检测