
无人驾驶方法及装置、系统、驾驶管理终端、存储介质.pdf

斌斌****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

无人驾驶方法及装置、系统、驾驶管理终端、存储介质.pdf
本发明提供了一种无人驾驶方法及装置、系统、驾驶管理终端、存储介质,应用于无人驾驶系统,所述无人驾驶系统至少包括驾驶管理平台、至少一视频处理器和与所述视频处理器关联的车辆,该方法包括:确定与目标视频处理器关联的目标车辆是否进入由所述驾驶管理平台控制的无人驾驶模式;若所述目标车辆进入无人驾驶模式,则生成用于控制所述目标车辆作业和行驶的控制信号;将所述控制信号通过所述目标视频处理器发送至所述目标车辆,以控制所述目标车辆作业和行驶;其中,所述目标视频处理器用于采集关于所述车辆的视频数据、作业信息和行驶状态信息,并

无人驾驶扫地车的避障方法、装置、系统及存储介质.pdf
本发明公开了一种无人驾驶扫地车的避障方法、装置、系统及存储介质,包括如下步骤:采集无人驾驶扫地车固定位置处多线激光雷达的三维点云数据作为第一种数据;采集无人驾驶扫地车固定位置处的红外传感器的数据信息作为第二种数据;采集无人驾驶扫地车固定位置处的超声波雷达的距离信息作为第三种数据;采集无人驾驶扫地车固定位置处的深度摄像头点云信息作为第四种数据;以第一幅点云数据为参考点云数据,将其他点云数据统一转换到第一幅点云数据的坐标系下;对避障点云进行若干区域分割,根据分割后的区域是否检测到障碍物控制无人驾驶清扫车加减速
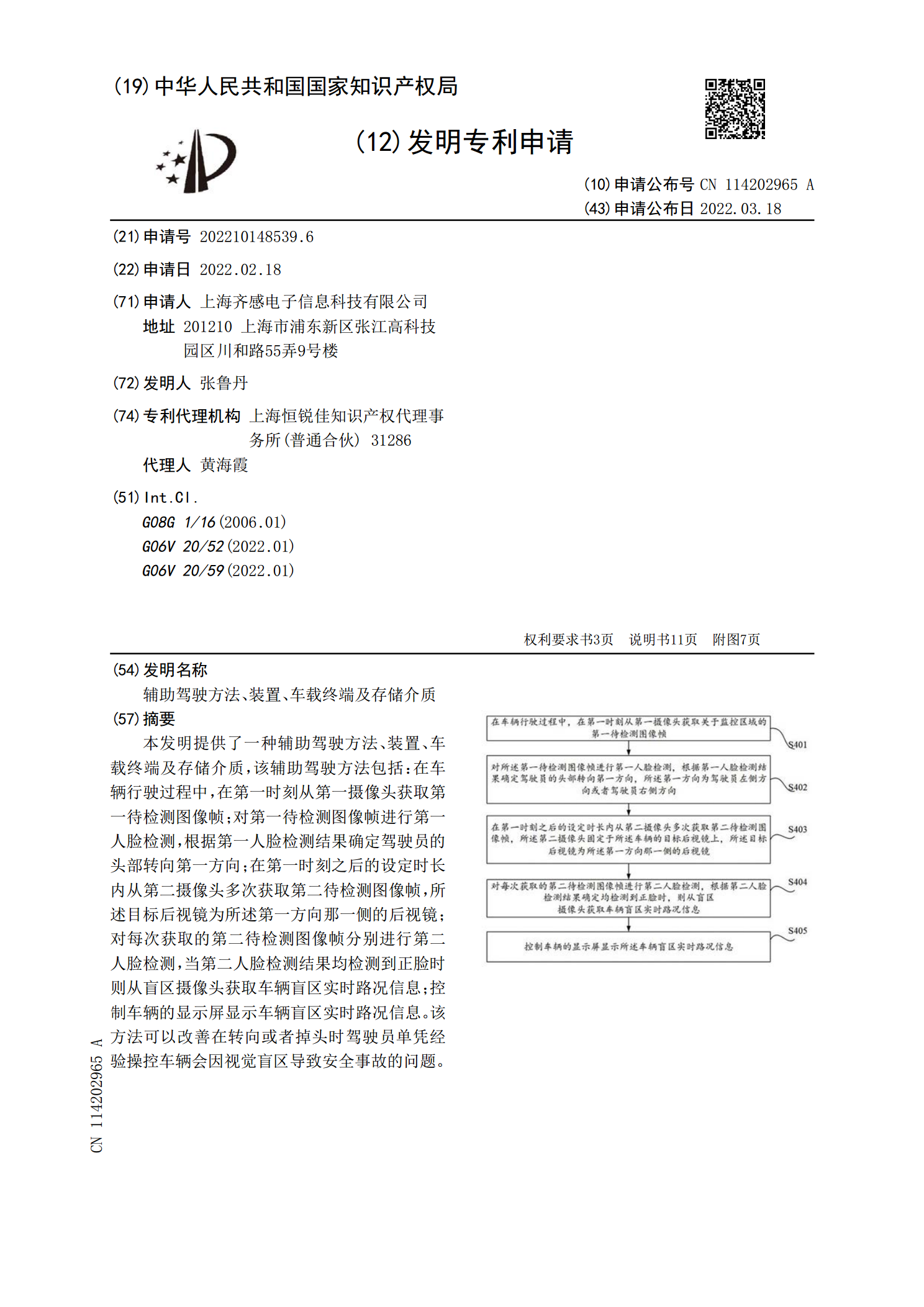
辅助驾驶方法、装置、车载终端及存储介质.pdf
本发明提供了一种辅助驾驶方法、装置、车载终端及存储介质,该辅助驾驶方法包括:在车辆行驶过程中,在第一时刻从第一摄像头获取第一待检测图像帧;对第一待检测图像帧进行第一人脸检测,根据第一人脸检测结果确定驾驶员的头部转向第一方向;在第一时刻之后的设定时长内从第二摄像头多次获取第二待检测图像帧,所述目标后视镜为所述第一方向那一侧的后视镜;对每次获取的第二待检测图像帧分别进行第二人脸检测,当第二人脸检测结果均检测到正脸时则从盲区摄像头获取车辆盲区实时路况信息;控制车辆的显示屏显示车辆盲区实时路况信息。该方法可以改善
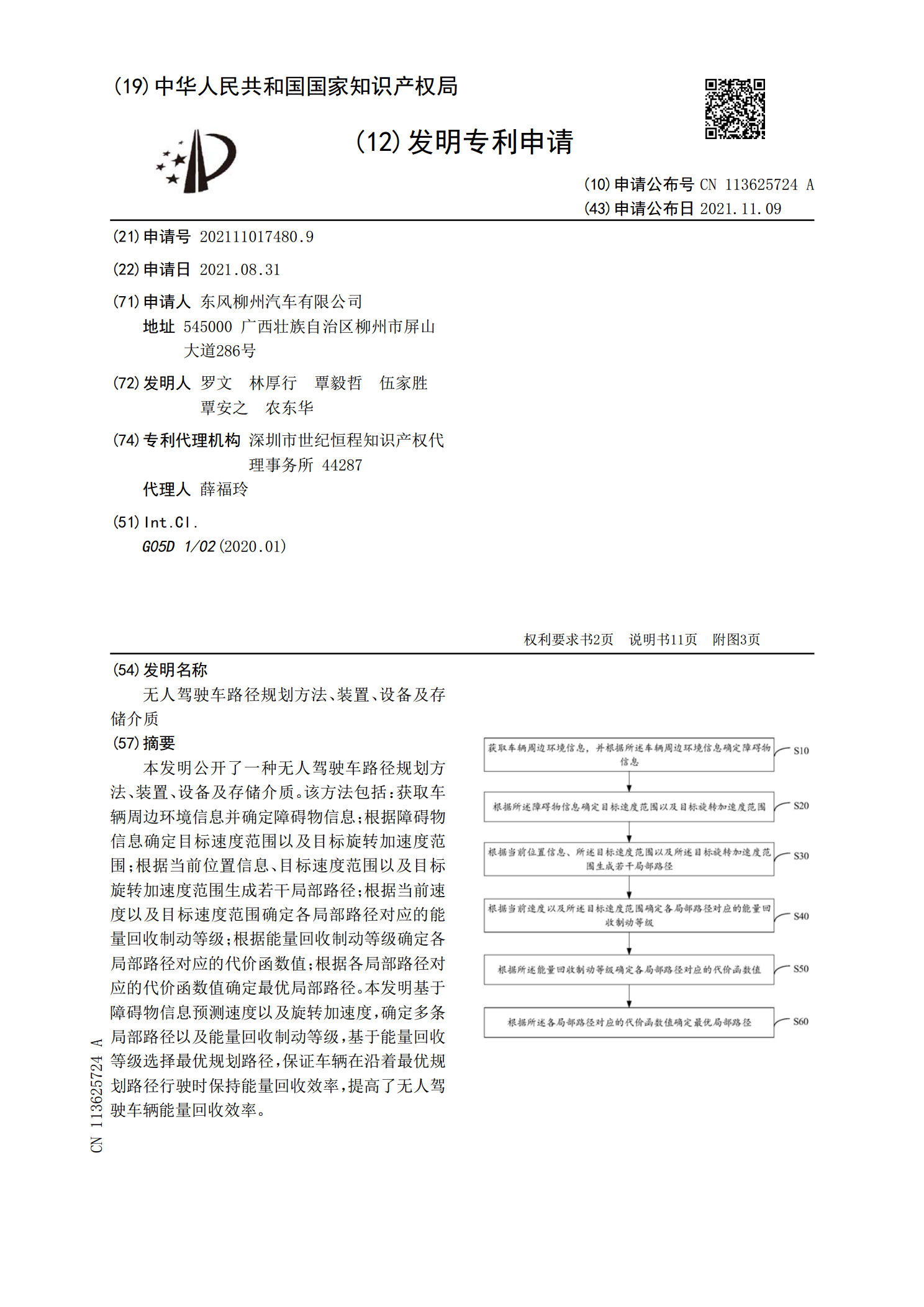
无人驾驶车路径规划方法、装置、设备及存储介质.pdf
本发明公开了一种无人驾驶车路径规划方法、装置、设备及存储介质。该方法包括:获取车辆周边环境信息并确定障碍物信息;根据障碍物信息确定目标速度范围以及目标旋转加速度范围;根据当前位置信息、目标速度范围以及目标旋转加速度范围生成若干局部路径;根据当前速度以及目标速度范围确定各局部路径对应的能量回收制动等级;根据能量回收制动等级确定各局部路径对应的代价函数值;根据各局部路径对应的代价函数值确定最优局部路径。本发明基于障碍物信息预测速度以及旋转加速度,确定多条局部路径以及能量回收制动等级,基于能量回收等级选择最优规

车辆控制方法、装置、设备、无人驾驶车辆及存储介质.pdf
本发明实施例提供一种车辆控制方法、装置、设备、无人驾驶车辆及存储介质。本发明实施例的方法,通过根据用户的辆召唤指令获取召唤车辆的用户的身份标识信息和位置,控制车辆前往所述用户所在的位置,使得用户无需步行前往固定乘车地点乘车,在游乐场所内的任何位置均可以自主地召唤车辆;车载终端根据所述用户的身份标识信息,智能地识别出所述用户选定的行驶路线,并在接收到所述用户的发车指令后,自动控制所述车辆沿所述行驶路线行驶,车辆更加智能地为用户提供服务,改善用户体验。