
无人驾驶扫地车的避障方法、装置、系统及存储介质.pdf

St****36

1/9
2/9
3/9

4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人驾驶扫地车的避障方法、装置、系统及存储介质.pdf
本发明公开了一种无人驾驶扫地车的避障方法、装置、系统及存储介质,包括如下步骤:采集无人驾驶扫地车固定位置处多线激光雷达的三维点云数据作为第一种数据;采集无人驾驶扫地车固定位置处的红外传感器的数据信息作为第二种数据;采集无人驾驶扫地车固定位置处的超声波雷达的距离信息作为第三种数据;采集无人驾驶扫地车固定位置处的深度摄像头点云信息作为第四种数据;以第一幅点云数据为参考点云数据,将其他点云数据统一转换到第一幅点云数据的坐标系下;对避障点云进行若干区域分割,根据分割后的区域是否检测到障碍物控制无人驾驶清扫车加减速

无人驾驶扫地车自动导航控制方法、装置及存储介质.pdf
本发明公开了一种无人驾驶扫地车自动导航控制方法、装置及存储介质,包括如下步骤:获取扫地车的预设全局路径,确定扫地车在当前路径的跟踪模式;获取扫地车当前在全局地图中位置信息与障碍物信息,计算其与障碍物的相对位姿并获取临时目标路径点集;采用预瞄准算法,计算出扫地车当前位置与当前路径的横向距离和偏航角误差,利用改进型纯追踪模型跟踪当前路径;不停的判定是否到达路径的目标终点,直到到达目标终点。所述方法流程简单,计算量小,保证一定程序的稳定性和安全性,其满足了清扫车自动清扫作业的需要。
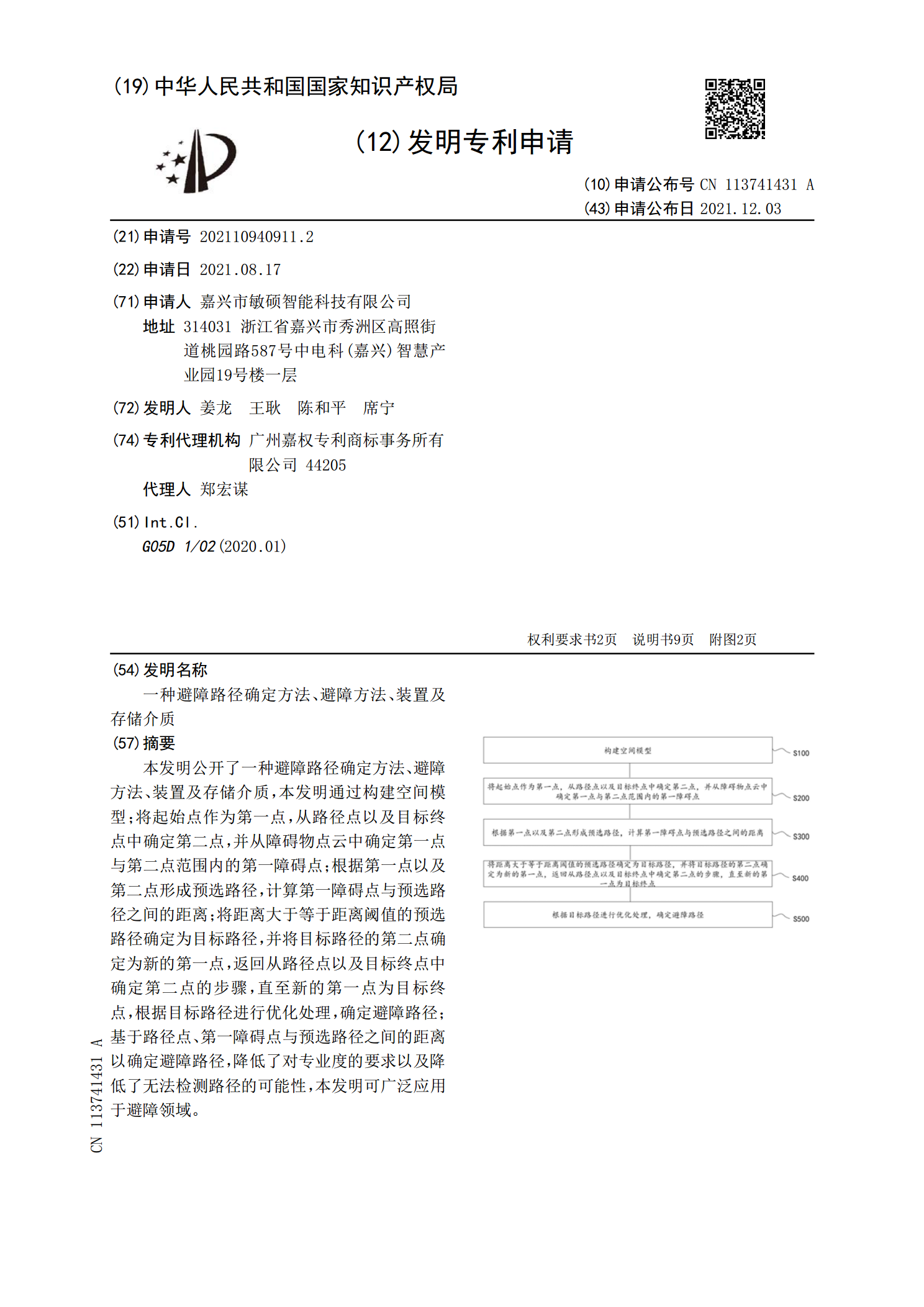
一种避障路径确定方法、避障方法、装置及存储介质.pdf
本发明公开了一种避障路径确定方法、避障方法、装置及存储介质,本发明通过构建空间模型;将起始点作为第一点,从路径点以及目标终点中确定第二点,并从障碍物点云中确定第一点与第二点范围内的第一障碍点;根据第一点以及第二点形成预选路径,计算第一障碍点与预选路径之间的距离;将距离大于等于距离阈值的预选路径确定为目标路径,并将目标路径的第二点确定为新的第一点,返回从路径点以及目标终点中确定第二点的步骤,直至新的第一点为目标终点,根据目标路径进行优化处理,确定避障路径;基于路径点、第一障碍点与预选路径之间的距离以确定避障

叉车避障方法、装置、叉车及存储介质.pdf
本发明属于叉车避障技术领域,公开了一种叉车避障方法、装置、叉车及存储介质,所述方法包括:在通过单目相机获取图像数据之后,将所述图像数据通过目标网络模型进行目标检测,得到检测结果;通过智能深度相机获取点云信息;基于所述检测结果和所述点云信息进行融合匹配,得到障碍物信息;根据所述障碍物信息中的障碍物类别以及位置信息确定避障策略,并基于所述避障策略进行避障。本申请能够基于障碍物信息和点云信息的融合匹配结果实现针对性避障,减少盲目避障,降低叉车上货物发生倾倒的可能性。
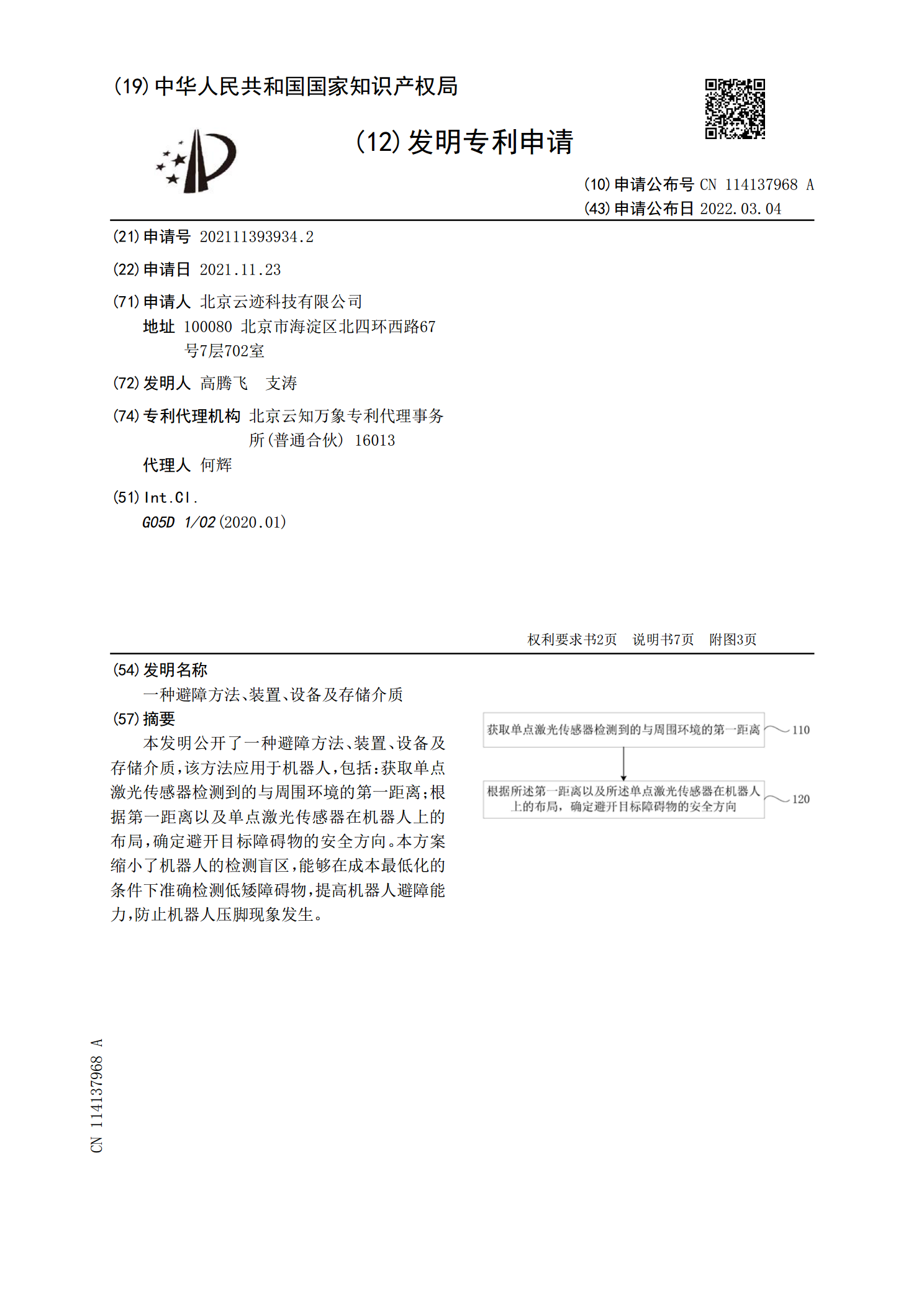
一种避障方法、装置、设备及存储介质.pdf
本发明公开了一种避障方法、装置、设备及存储介质,该方法应用于机器人,包括:获取单点激光传感器检测到的与周围环境的第一距离;根据第一距离以及单点激光传感器在机器人上的布局,确定避开目标障碍物的安全方向。本方案缩小了机器人的检测盲区,能够在成本最低化的条件下准确检测低矮障碍物,提高机器人避障能力,防止机器人压脚现象发生。