
一种基于单目相机进行稠密建图的方法.pdf

宛菡****魔王


1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于单目相机进行稠密建图的方法.pdf
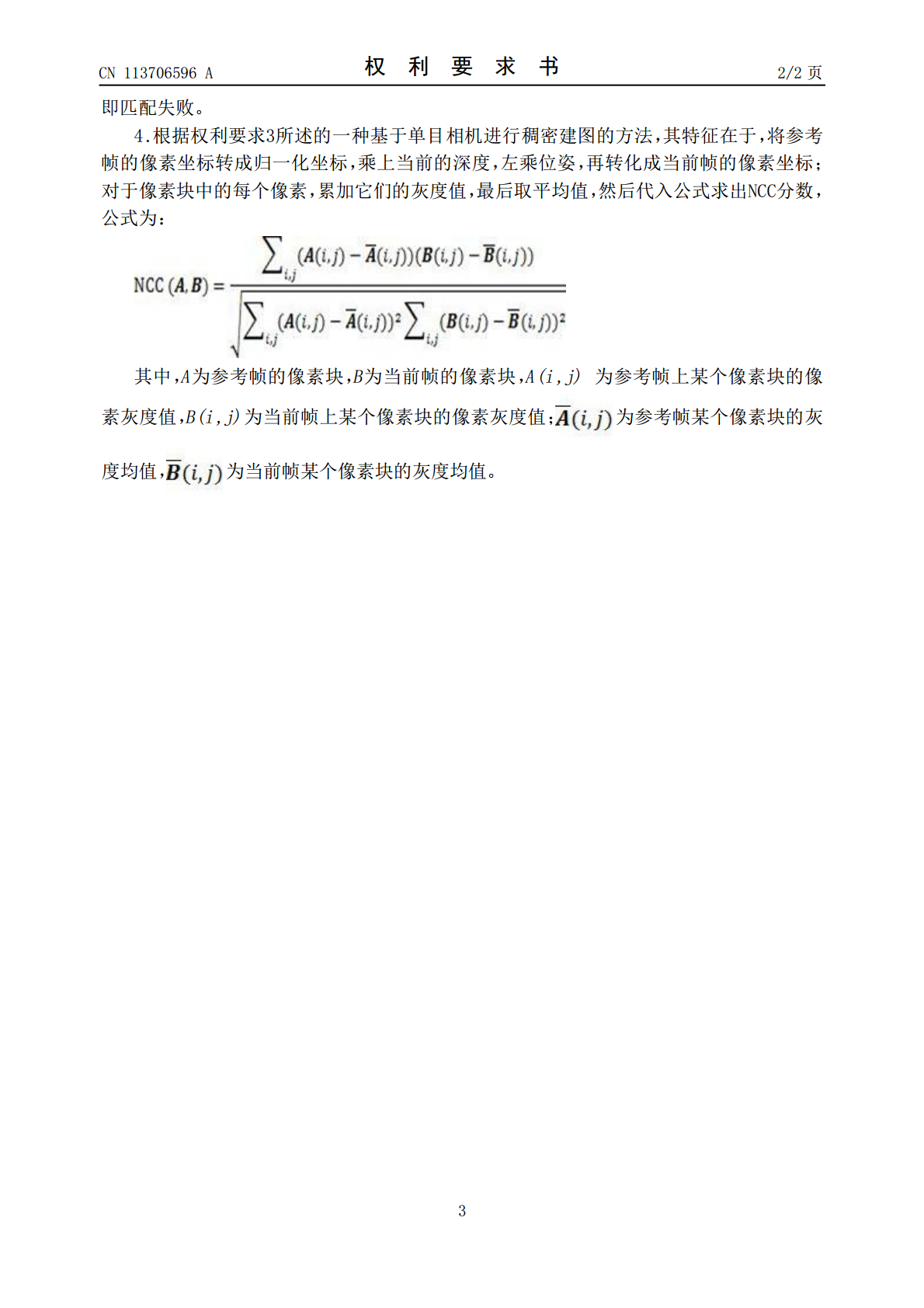
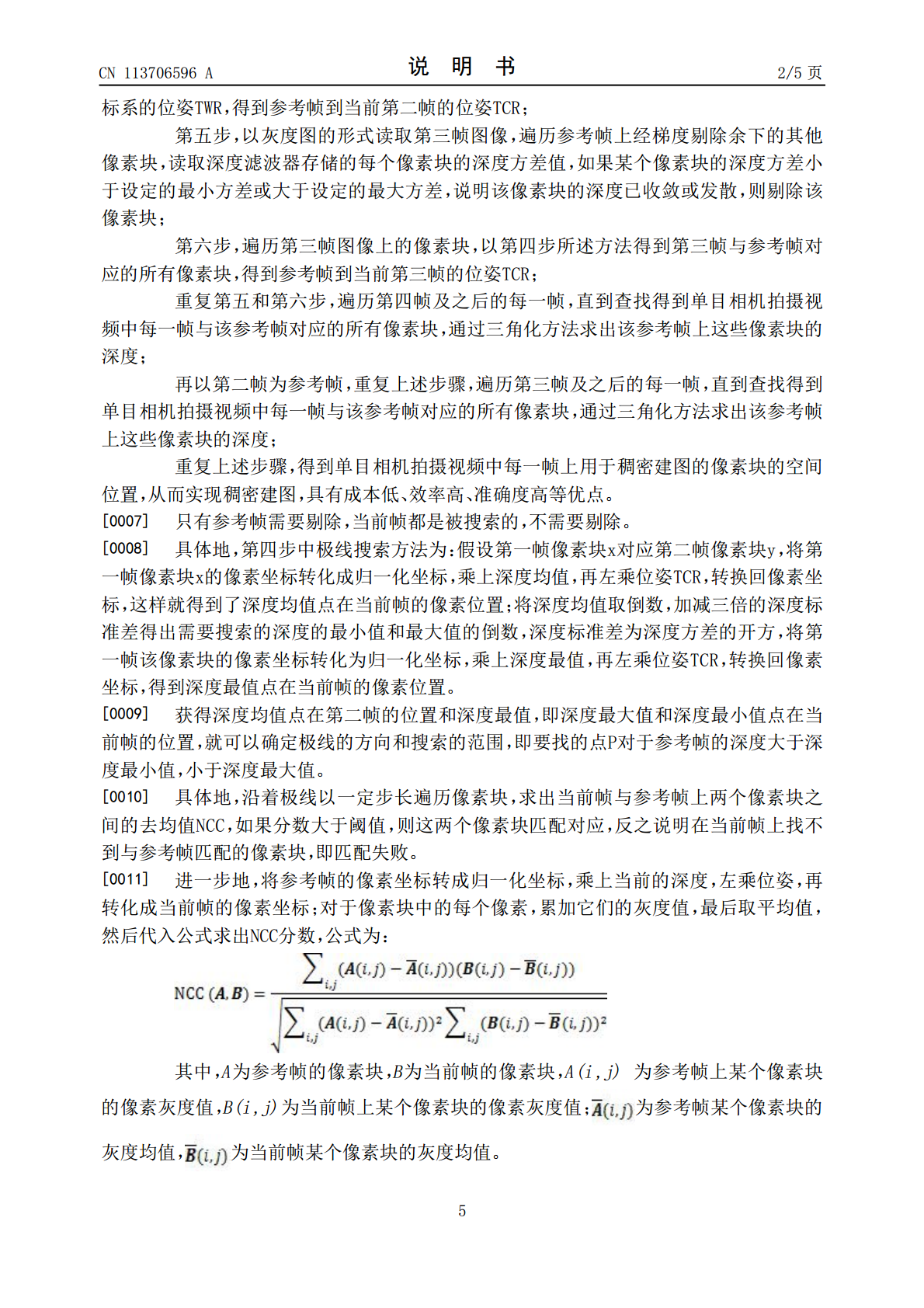
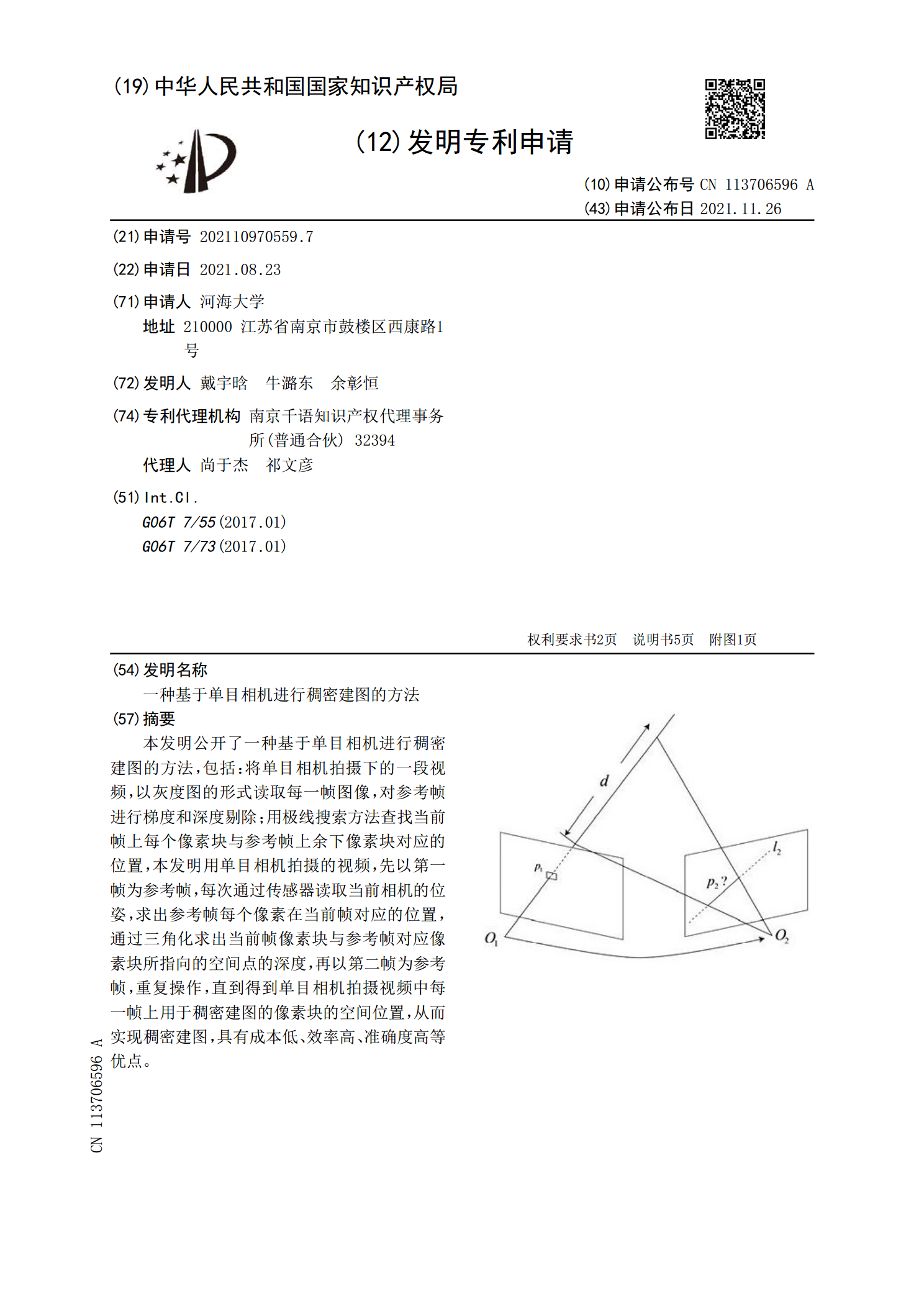
本发明公开了一种基于单目相机进行稠密建图的方法,包括:将单目相机拍摄下的一段视频,以灰度图的形式读取每一帧图像,对参考帧进行梯度和深度剔除;用极线搜索方法查找当前帧上每个像素块与参考帧上余下像素块对应的位置,本发明用单目相机拍摄的视频,先以第一帧为参考帧,每次通过传感器读取当前相机的位姿,求出参考帧每个像素在当前帧对应的位置,通过三角化求出当前帧像素块与参考帧对应像素块所指向的空间点的深度,再以第二帧为参考帧,重复操作,直到得到单目相机拍摄视频中每一帧上用于稠密建图的像素块的空间位置,从而实现稠密建图,具

一种单目相机成像半稠密建图方法、存储介质及装置.pdf
本发明公开了一种单目相机成像半稠密建图方法,该方法为:S1:筛选关键帧:从单目相机的成像中逐步筛选出关键帧,得到关键帧集合;S2:信息处理:处理关键帧集合中的图像信息,得到像素逆深度相关信息;S3:半稠密建图:结合逆深度分布的相关信息与关键帧集合,处理得到半稠密的点云地图。相比于现有技术,在本发明当中提供的单目相机成像半稠密建图方法以单目相机为前端图像采集器,对采集到的图像以设定手段筛选出关键帧后,依据关键帧集合中的图像的像素逆深度相关信息半稠密建图,相比传统视觉SLAM系统中常见的稠密建图,可方便取得更

基于单目相机的深度图生成装置及方法.pdf
本发明涉及基于单目相机的深度图生成装置,包含单目相机和RealSense相机;单目相机安装在第一云台上;RealSense相机安装在第二云台上;单目相机与RealSense相机紧密配合,光轴平行。本发明还涉及基于单目相机的深度图生成方法,包含步骤:采集1张单目相机RGB图像;采集1张RealSense相机RGB图像和1张RealSense相机深度图;向下采样得到向下采样单目相机RGB图像;进行超像素分割操作,得到分割单目相机RGB图像;进行特征点匹配操作,得到匹配深度图;进行区域分割,得到分区深度图;统计

一种基于单目相机的AGV行人跟随方法.pdf
本发明涉及一种基于单目相机的AGV行人跟随方法,包括以下步骤:1)检测行人目标:根据部署在上位机的行人检测模型得到行人目标检测框;2)利用单目相机标定单应矩阵:获取三维世界坐标系到二维像素坐标系的单应矩阵H;3)行人坐标解算:计算三维世界坐标系下行人与地面接触点的坐标,即行人目标的世界坐标(x

一种基于单目移动RGB相机的光照估计方法.docx
一种基于单目移动RGB相机的光照估计方法基于单目移动RGB相机的光照估计方法摘要:光照估计在计算机视觉和图形学领域中具有重要的应用,可以用于增强图像和视频质量、提取场景深度信息以及实现增强现实等方面。本文提出了一种基于单目移动RGB相机的光照估计方法,该方法通过分析图像中的色彩和亮度信息,利用相机的移动和颜色信息,实现对光照条件的估计。实验结果表明,该方法可以有效地估计光照条件,并且在光照估计的精度和稳定性上具有优势。1.引言光照估计是计算机视觉和图形学领域中的一个重要研究课题。光照条件直接影响图像和视频