
一种基于单目相机的AGV行人跟随方法.pdf

Ke****67


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于单目相机的AGV行人跟随方法.pdf
本发明涉及一种基于单目相机的AGV行人跟随方法,包括以下步骤:1)检测行人目标:根据部署在上位机的行人检测模型得到行人目标检测框;2)利用单目相机标定单应矩阵:获取三维世界坐标系到二维像素坐标系的单应矩阵H;3)行人坐标解算:计算三维世界坐标系下行人与地面接触点的坐标,即行人目标的世界坐标(x

基于领航-跟随策略的跟随AGV协同控制方法.docx
基于领航-跟随策略的跟随AGV协同控制方法基于领航-跟随策略的跟随AGV协同控制方法摘要:随着物流行业的快速发展,自主导航AGV(AutomatedGuidedVehicle)在物流场景中发挥着重要作用。在一些特殊情况下,如狭窄的通道或高流量的运输场所,单个AGV未能满足物流系统的需求。因此,本文提出了基于领航-跟随策略的跟随AGV协同控制方法,以提高物流系统的整体效率和安全性。关键词:AGV、领航-跟随策略、协同控制、物流系统、效率、安全性1.引言自主导航AGV已经广泛应用于工业自动化领域,通过自动化的

一种基于单目移动RGB相机的光照估计方法.docx
一种基于单目移动RGB相机的光照估计方法基于单目移动RGB相机的光照估计方法摘要:光照估计在计算机视觉和图形学领域中具有重要的应用,可以用于增强图像和视频质量、提取场景深度信息以及实现增强现实等方面。本文提出了一种基于单目移动RGB相机的光照估计方法,该方法通过分析图像中的色彩和亮度信息,利用相机的移动和颜色信息,实现对光照条件的估计。实验结果表明,该方法可以有效地估计光照条件,并且在光照估计的精度和稳定性上具有优势。1.引言光照估计是计算机视觉和图形学领域中的一个重要研究课题。光照条件直接影响图像和视频
一种基于单目相机进行稠密建图的方法.pdf
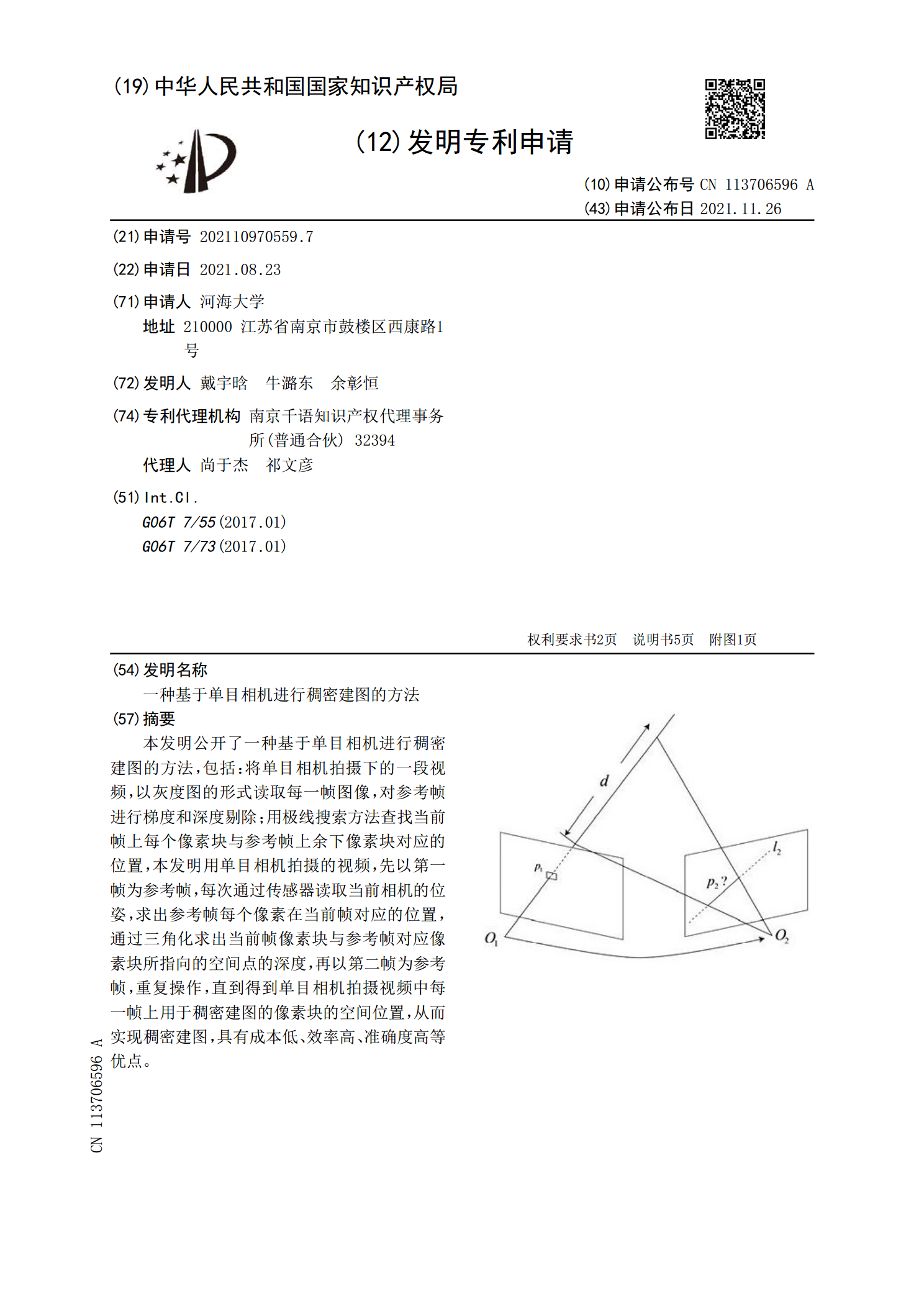
本发明公开了一种基于单目相机进行稠密建图的方法,包括:将单目相机拍摄下的一段视频,以灰度图的形式读取每一帧图像,对参考帧进行梯度和深度剔除;用极线搜索方法查找当前帧上每个像素块与参考帧上余下像素块对应的位置,本发明用单目相机拍摄的视频,先以第一帧为参考帧,每次通过传感器读取当前相机的位姿,求出参考帧每个像素在当前帧对应的位置,通过三角化求出当前帧像素块与参考帧对应像素块所指向的空间点的深度,再以第二帧为参考帧,重复操作,直到得到单目相机拍摄视频中每一帧上用于稠密建图的像素块的空间位置,从而实现稠密建图,具
一种基于单目相机的海面测距方法和系统.pdf
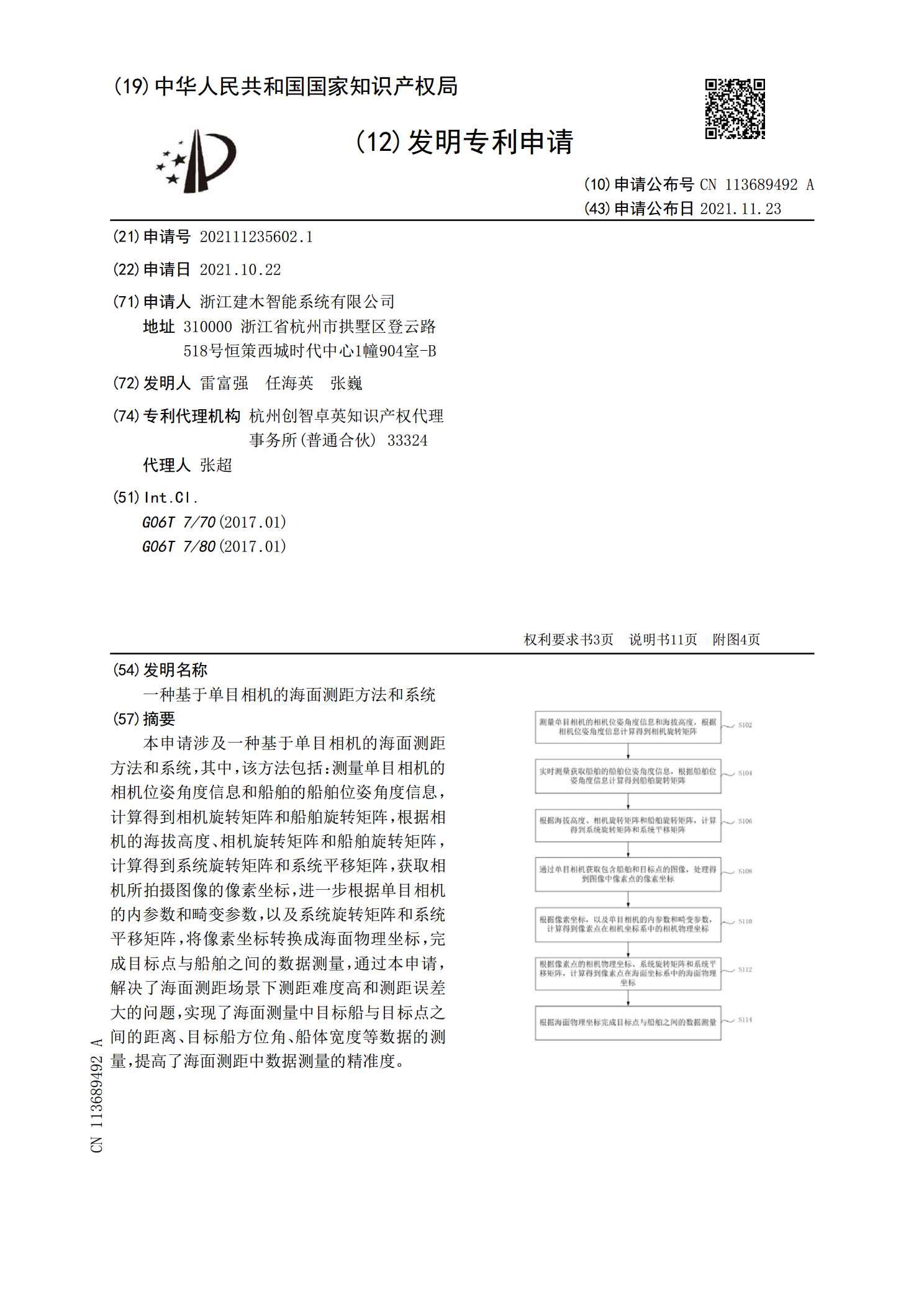
本申请涉及一种基于单目相机的海面测距方法和系统,其中,该方法包括:测量单目相机的相机位姿角度信息和船舶的船舶位姿角度信息,计算得到相机旋转矩阵和船舶旋转矩阵,根据相机的海拔高度、相机旋转矩阵和船舶旋转矩阵,计算得到系统旋转矩阵和系统平移矩阵,获取相机所拍摄图像的像素坐标,进一步根据单目相机的内参数和畸变参数,以及系统旋转矩阵和系统平移矩阵,将像素坐标转换成海面物理坐标,完成目标点与船舶之间的数据测量,通过本申请,解决了海面测距场景下测距难度高和测距误差大的问题,实现了海面测量中目标船与目标点之间的距离、目