
一种基于单目移动RGB相机的光照估计方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于单目移动RGB相机的光照估计方法.docx
一种基于单目移动RGB相机的光照估计方法基于单目移动RGB相机的光照估计方法摘要:光照估计在计算机视觉和图形学领域中具有重要的应用,可以用于增强图像和视频质量、提取场景深度信息以及实现增强现实等方面。本文提出了一种基于单目移动RGB相机的光照估计方法,该方法通过分析图像中的色彩和亮度信息,利用相机的移动和颜色信息,实现对光照条件的估计。实验结果表明,该方法可以有效地估计光照条件,并且在光照估计的精度和稳定性上具有优势。1.引言光照估计是计算机视觉和图形学领域中的一个重要研究课题。光照条件直接影响图像和视频

基于单目RGB相机的手部姿态估计技术与系统.docx
基于单目RGB相机的手部姿态估计技术与系统基于单目RGB相机的手部姿态估计技术与系统摘要:手部姿态估计是计算机视觉领域的一个重要研究方向。随着深度学习的快速发展,基于单目RGB相机的手部姿态估计技术得到了广泛的研究和应用。本文将介绍基于单目RGB相机的手部姿态估计技术的原理和方法,并设计了一个实时手部姿态估计系统,用于实时跟踪和估计手部的姿态。1.引言手部姿态估计是计算机视觉领域的一个重要研究课题,它对于许多领域具有重要的应用价值。例如,在虚拟现实、手势识别、人机交互和生物医学工程等领域,手部姿态估计技术
一种基于单目摄像机的光照估计方法.pdf
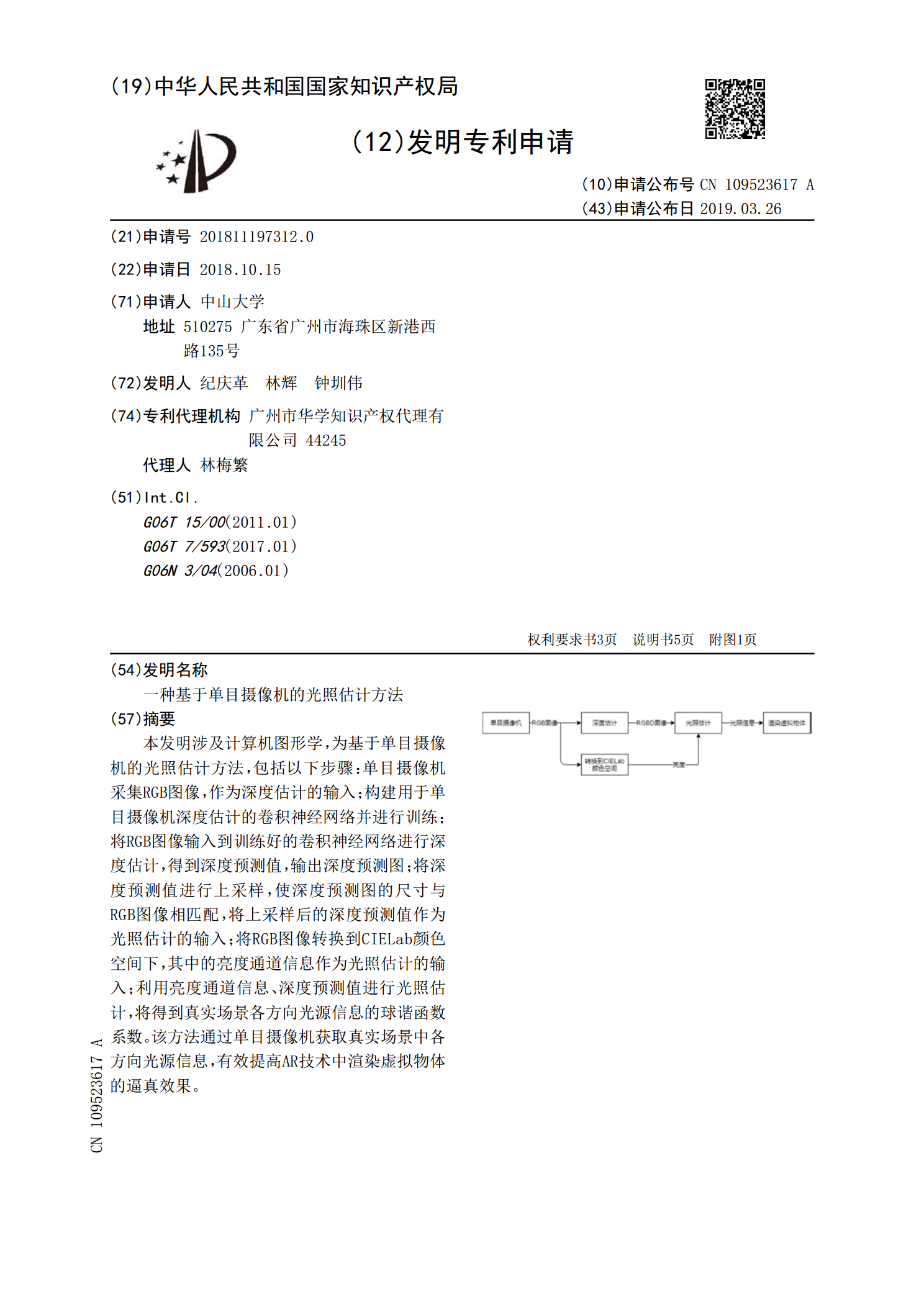
本发明涉及计算机图形学,为基于单目摄像机的光照估计方法,包括以下步骤:单目摄像机采集RGB图像,作为深度估计的输入;构建用于单目摄像机深度估计的卷积神经网络并进行训练;将RGB图像输入到训练好的卷积神经网络进行深度估计,得到深度预测值,输出深度预测图;将深度预测值进行上采样,使深度预测图的尺寸与RGB图像相匹配,将上采样后的深度预测值作为光照估计的输入;将RGB图像转换到CIELab颜色空间下,其中的亮度通道信息作为光照估计的输入;利用亮度通道信息、深度预测值进行光照估计,将得到真实场景各方向光源信息的球
基于双目RGB-D相机深度轮廓估计方法.pdf
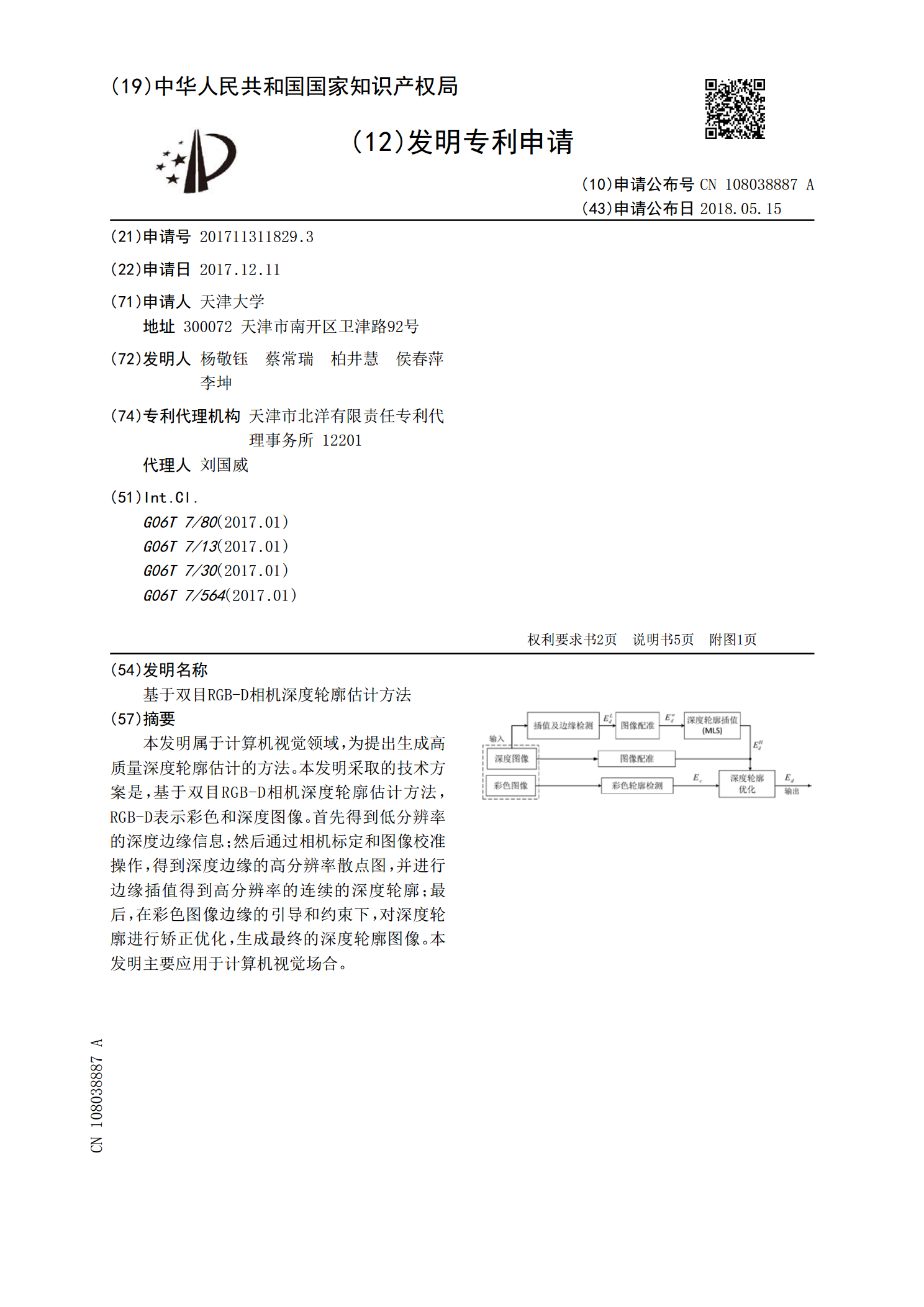
本发明属于计算机视觉领域,为提出生成高质量深度轮廓估计的方法。本发明采取的技术方案是,基于双目RGB‑D相机深度轮廓估计方法,RGB‑D表示彩色和深度图像。首先得到低分辨率的深度边缘信息;然后通过相机标定和图像校准操作,得到深度边缘的高分辨率散点图,并进行边缘插值得到高分辨率的连续的深度轮廓;最后,在彩色图像边缘的引导和约束下,对深度轮廓进行矫正优化,生成最终的深度轮廓图像。本发明主要应用于计算机视觉场合。
针对脉冲相机的单目深度估计方法及装置.pdf
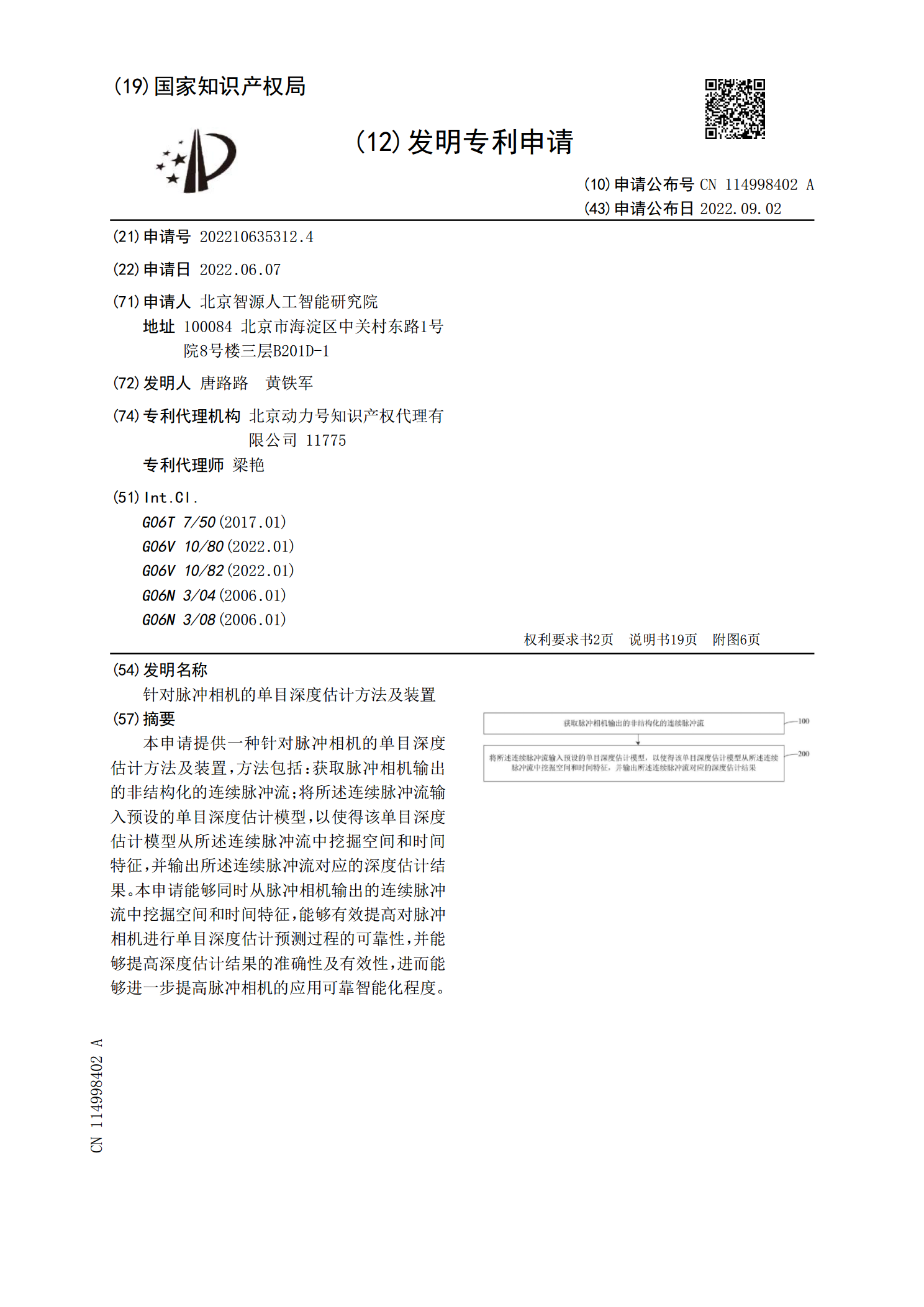
本申请提供一种针对脉冲相机的单目深度估计方法及装置,方法包括:获取脉冲相机输出的非结构化的连续脉冲流;将所述连续脉冲流输入预设的单目深度估计模型,以使得该单目深度估计模型从所述连续脉冲流中挖掘空间和时间特征,并输出所述连续脉冲流对应的深度估计结果。本申请能够同时从脉冲相机输出的连续脉冲流中挖掘空间和时间特征,能够有效提高对脉冲相机进行单目深度估计预测过程的可靠性,并能够提高深度估计结果的准确性及有效性,进而能够进一步提高脉冲相机的应用可靠智能化程度。