
一种单目相机成像半稠密建图方法、存储介质及装置.pdf

灵波****ng


1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种单目相机成像半稠密建图方法、存储介质及装置.pdf
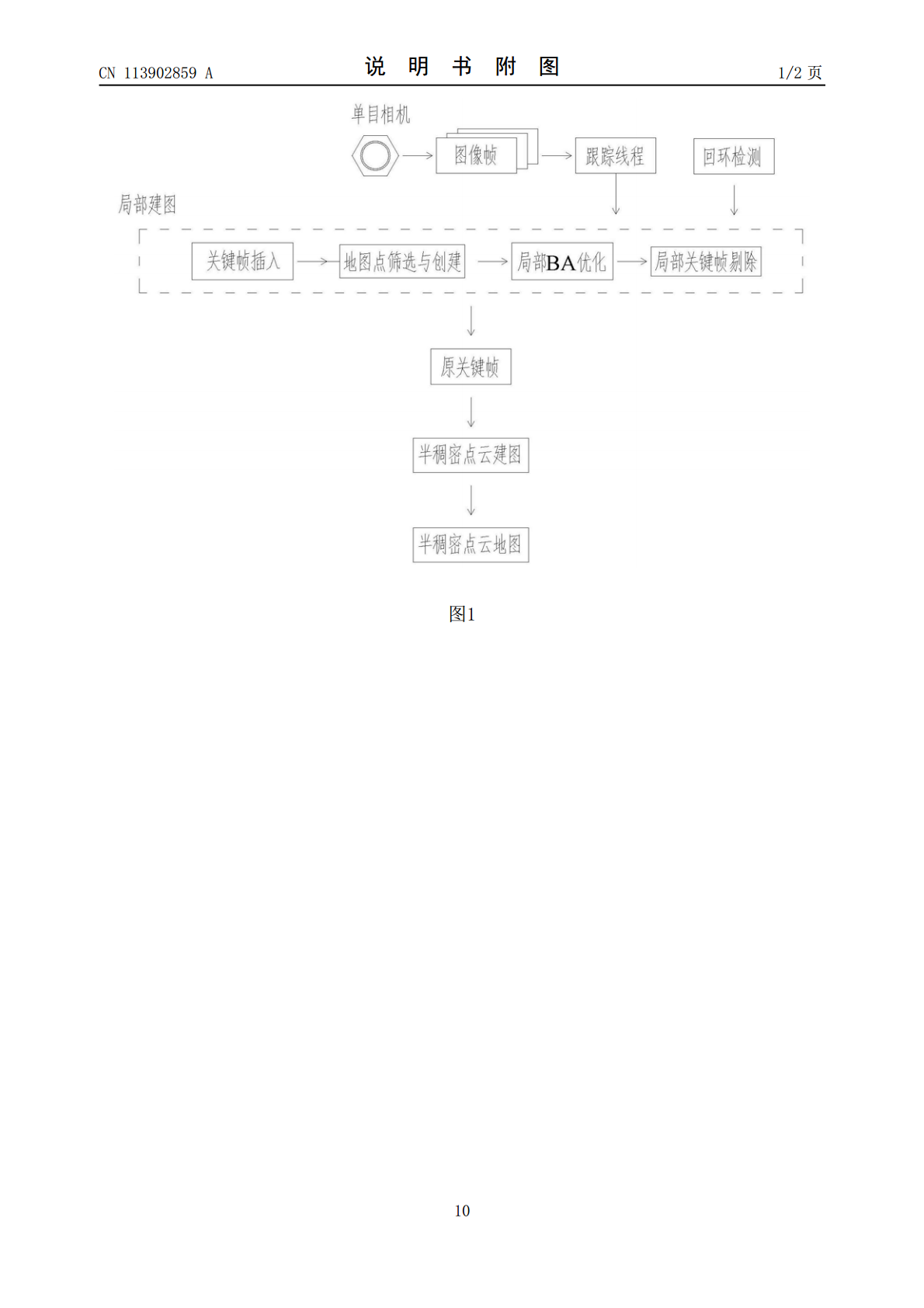
本发明公开了一种单目相机成像半稠密建图方法,该方法为:S1:筛选关键帧:从单目相机的成像中逐步筛选出关键帧,得到关键帧集合;S2:信息处理:处理关键帧集合中的图像信息,得到像素逆深度相关信息;S3:半稠密建图:结合逆深度分布的相关信息与关键帧集合,处理得到半稠密的点云地图。相比于现有技术,在本发明当中提供的单目相机成像半稠密建图方法以单目相机为前端图像采集器,对采集到的图像以设定手段筛选出关键帧后,依据关键帧集合中的图像的像素逆深度相关信息半稠密建图,相比传统视觉SLAM系统中常见的稠密建图,可方便取得更
一种基于单目相机进行稠密建图的方法.pdf
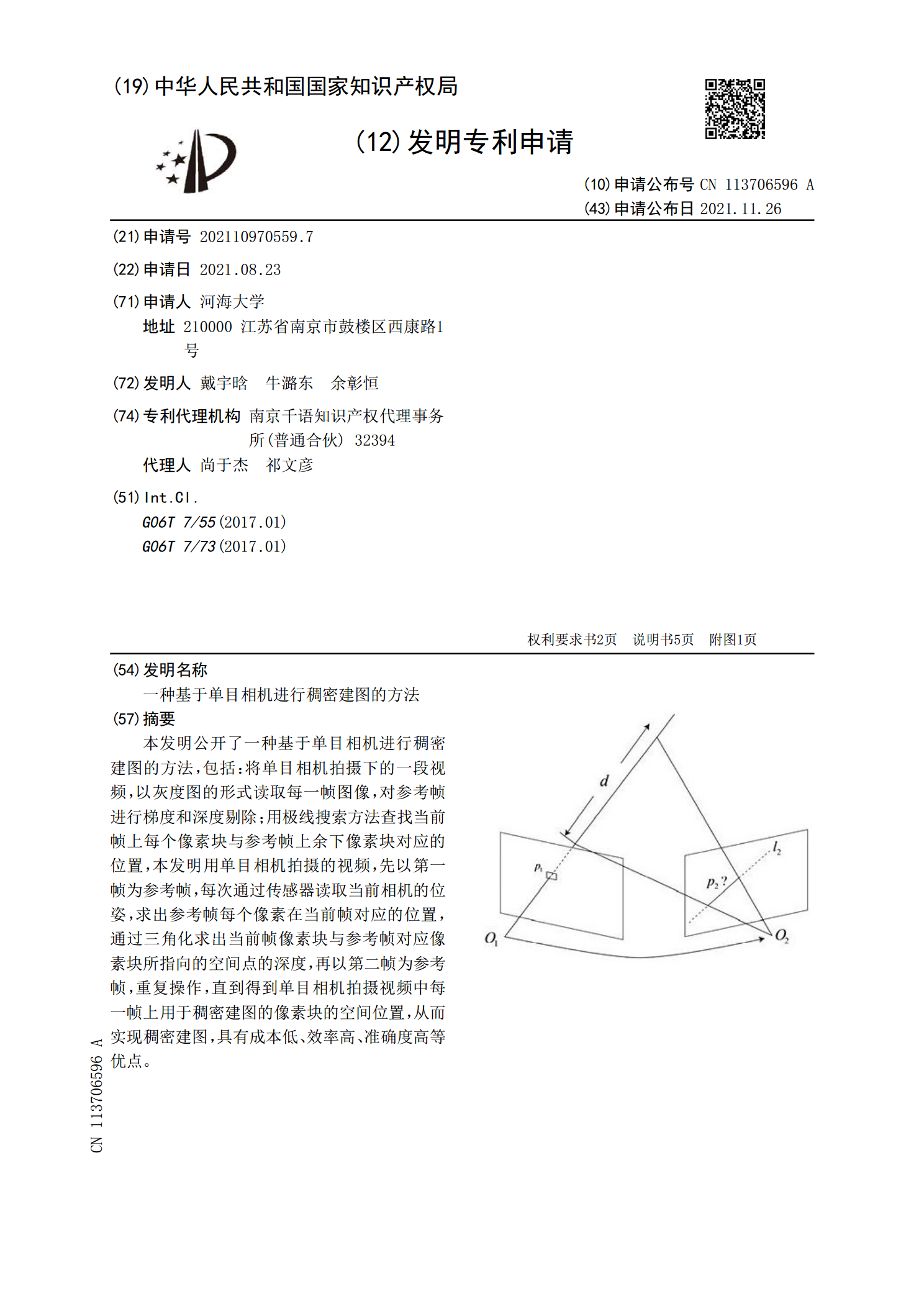
本发明公开了一种基于单目相机进行稠密建图的方法,包括:将单目相机拍摄下的一段视频,以灰度图的形式读取每一帧图像,对参考帧进行梯度和深度剔除;用极线搜索方法查找当前帧上每个像素块与参考帧上余下像素块对应的位置,本发明用单目相机拍摄的视频,先以第一帧为参考帧,每次通过传感器读取当前相机的位姿,求出参考帧每个像素在当前帧对应的位置,通过三角化求出当前帧像素块与参考帧对应像素块所指向的空间点的深度,再以第二帧为参考帧,重复操作,直到得到单目相机拍摄视频中每一帧上用于稠密建图的像素块的空间位置,从而实现稠密建图,具

基于单目相机的深度图生成装置及方法.pdf
本发明涉及基于单目相机的深度图生成装置,包含单目相机和RealSense相机;单目相机安装在第一云台上;RealSense相机安装在第二云台上;单目相机与RealSense相机紧密配合,光轴平行。本发明还涉及基于单目相机的深度图生成方法,包含步骤:采集1张单目相机RGB图像;采集1张RealSense相机RGB图像和1张RealSense相机深度图;向下采样得到向下采样单目相机RGB图像;进行超像素分割操作,得到分割单目相机RGB图像;进行特征点匹配操作,得到匹配深度图;进行区域分割,得到分区深度图;统计
一种语义建图方法、装置及存储介质.pdf
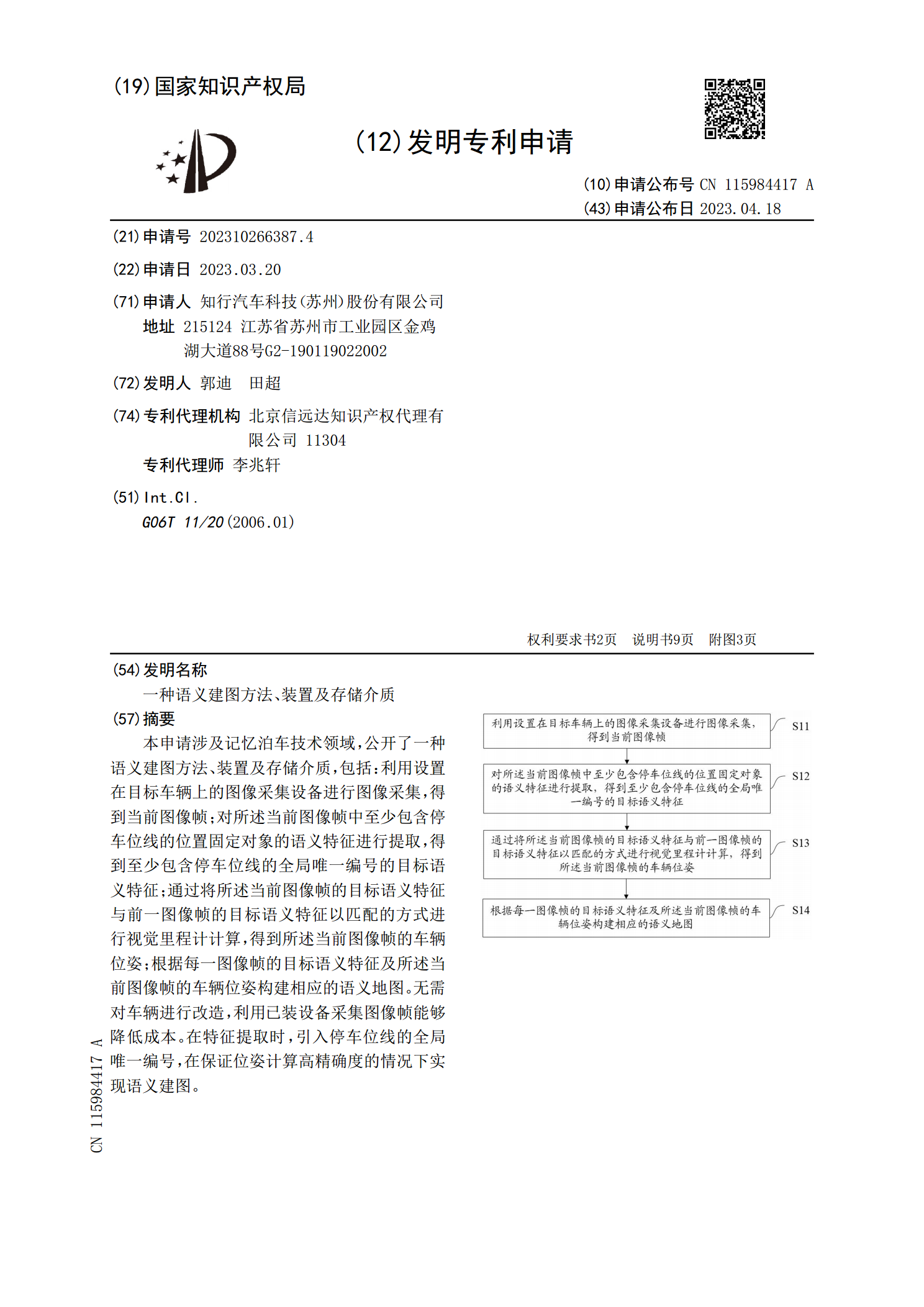
本申请涉及记忆泊车技术领域,公开了一种语义建图方法、装置及存储介质,包括:利用设置在目标车辆上的图像采集设备进行图像采集,得到当前图像帧;对所述当前图像帧中至少包含停车位线的位置固定对象的语义特征进行提取,得到至少包含停车位线的全局唯一编号的目标语义特征;通过将所述当前图像帧的目标语义特征与前一图像帧的目标语义特征以匹配的方式进行视觉里程计计算,得到所述当前图像帧的车辆位姿;根据每一图像帧的目标语义特征及所述当前图像帧的车辆位姿构建相应的语义地图。无需对车辆进行改造,利用已装设备采集图像帧能够降低成本。在

一种相机控制方法、装置以及存储介质.pdf
本申请公开了一种相机控制方法、装置以及存储介质,用于对相机进行控制,减少相机对焦时产生的拉伸感。本申请方法包括:当相机进行自动对焦时,查询预建立的映射表,所述映射表中记录有所述相机各个对焦距离与视场角FOV裁剪框坐标的映射关系;根据所述映射表确定与当前对焦距离相匹配的目标裁剪框坐标;使用所述目标裁剪框坐标对所述相机当前的预览图像进行动态调整,以使得所述相机的FOV保持不变。