
一种两自由度压电驱动平台及其设计方法.pdf

一吃****海逸

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种两自由度压电驱动平台及其设计方法.pdf
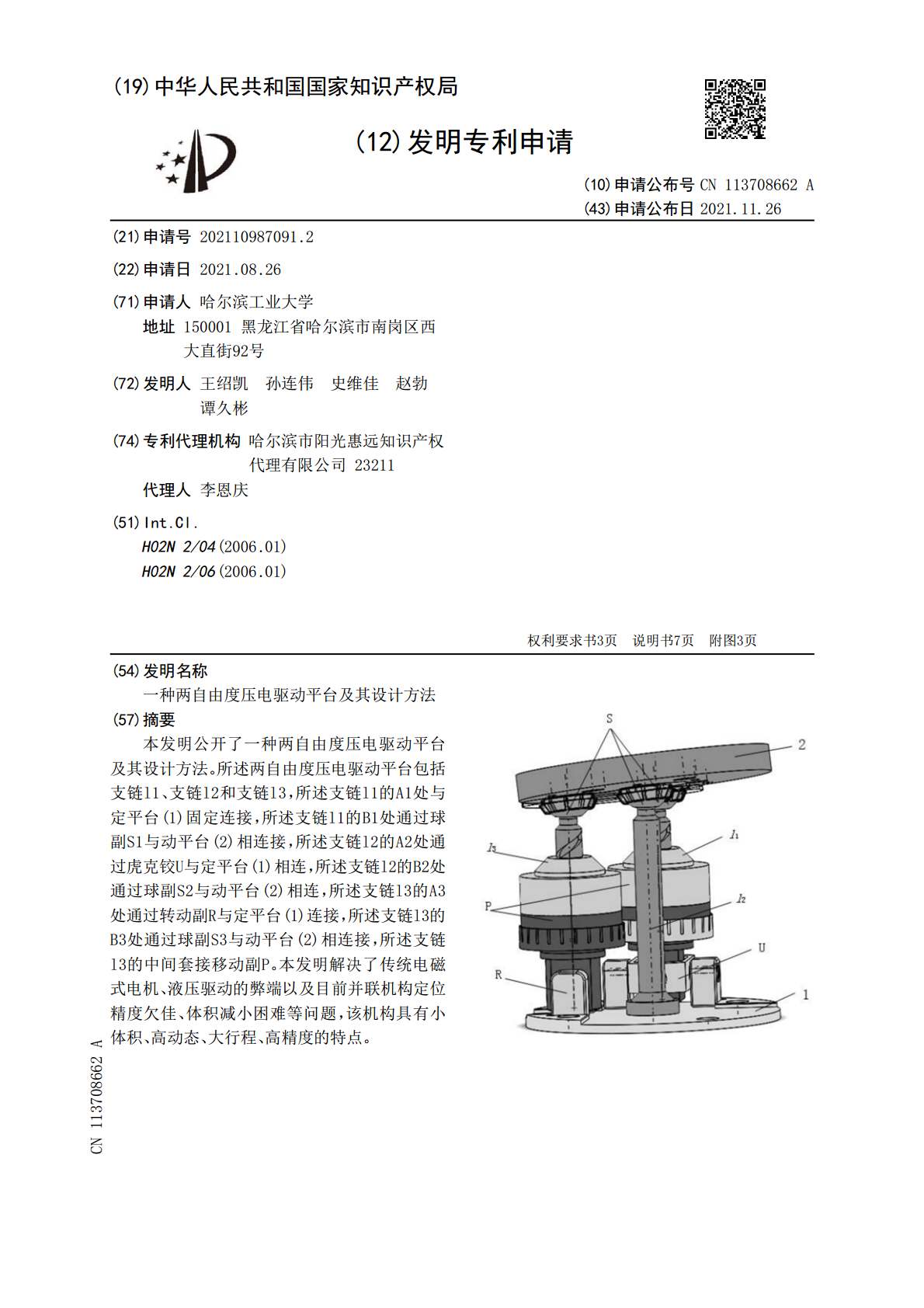
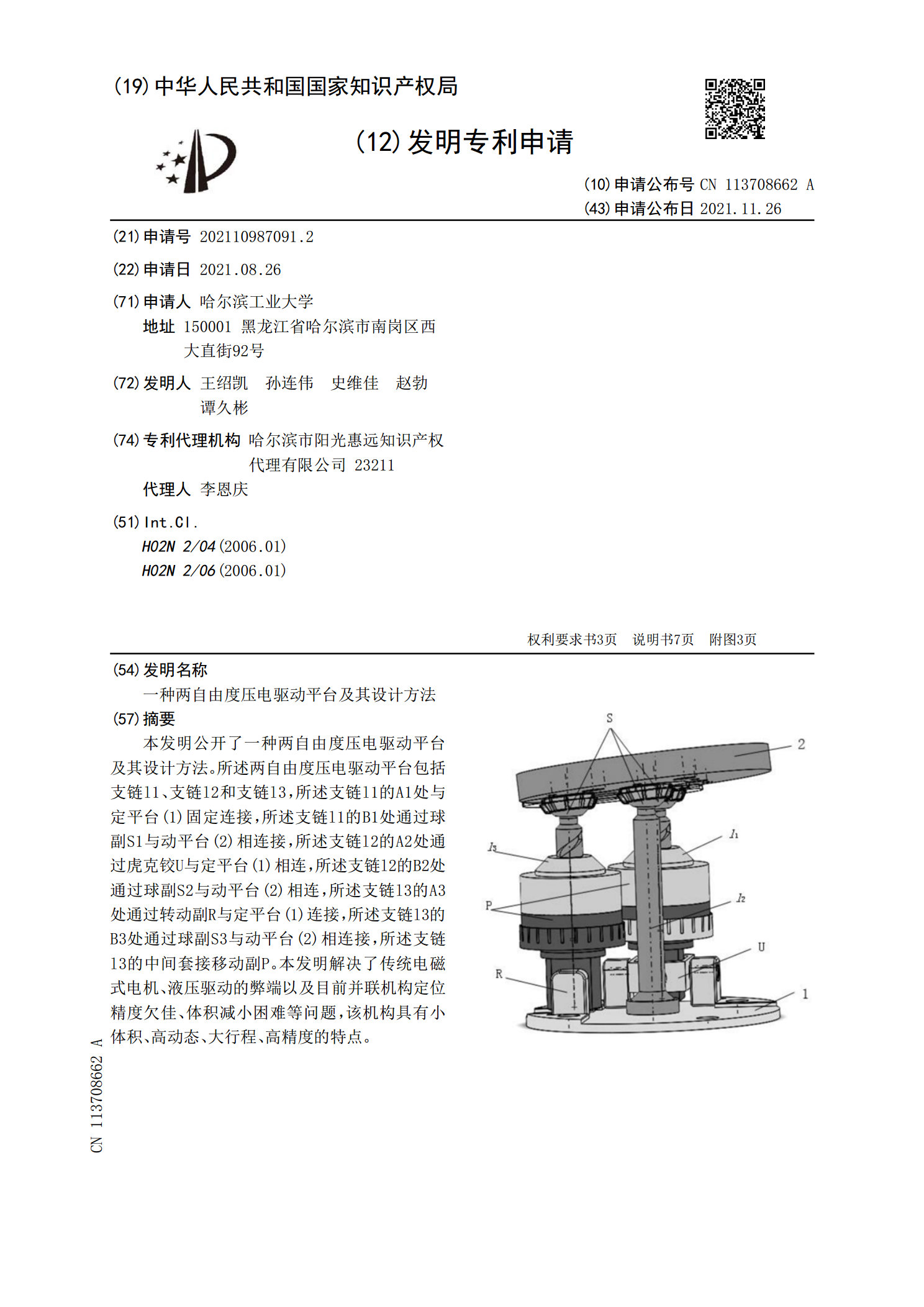
本发明公开了一种两自由度压电驱动平台及其设计方法。所述两自由度压电驱动平台包括支链l1、支链l2和支链l3,所述支链l1的A1处与定平台(1)固定连接,所述支链l1的B1处通过球副S1与动平台(2)相连接,所述支链l2的A2处通过虎克铰U与定平台(1)相连,所述支链l2的B2处通过球副S2与动平台(2)相连,所述支链l3的A3处通过转动副R与定平台(1)连接,所述支链l3的B3处通过球副S3与动平台(2)相连接,所述支链l3的中间套接移动副P。本发明解决了传统电磁式电机、液压驱动的弊端以及目前并联机构定位
一种宽速度范围两自由度大尺度压电平台及其激励方法.pdf
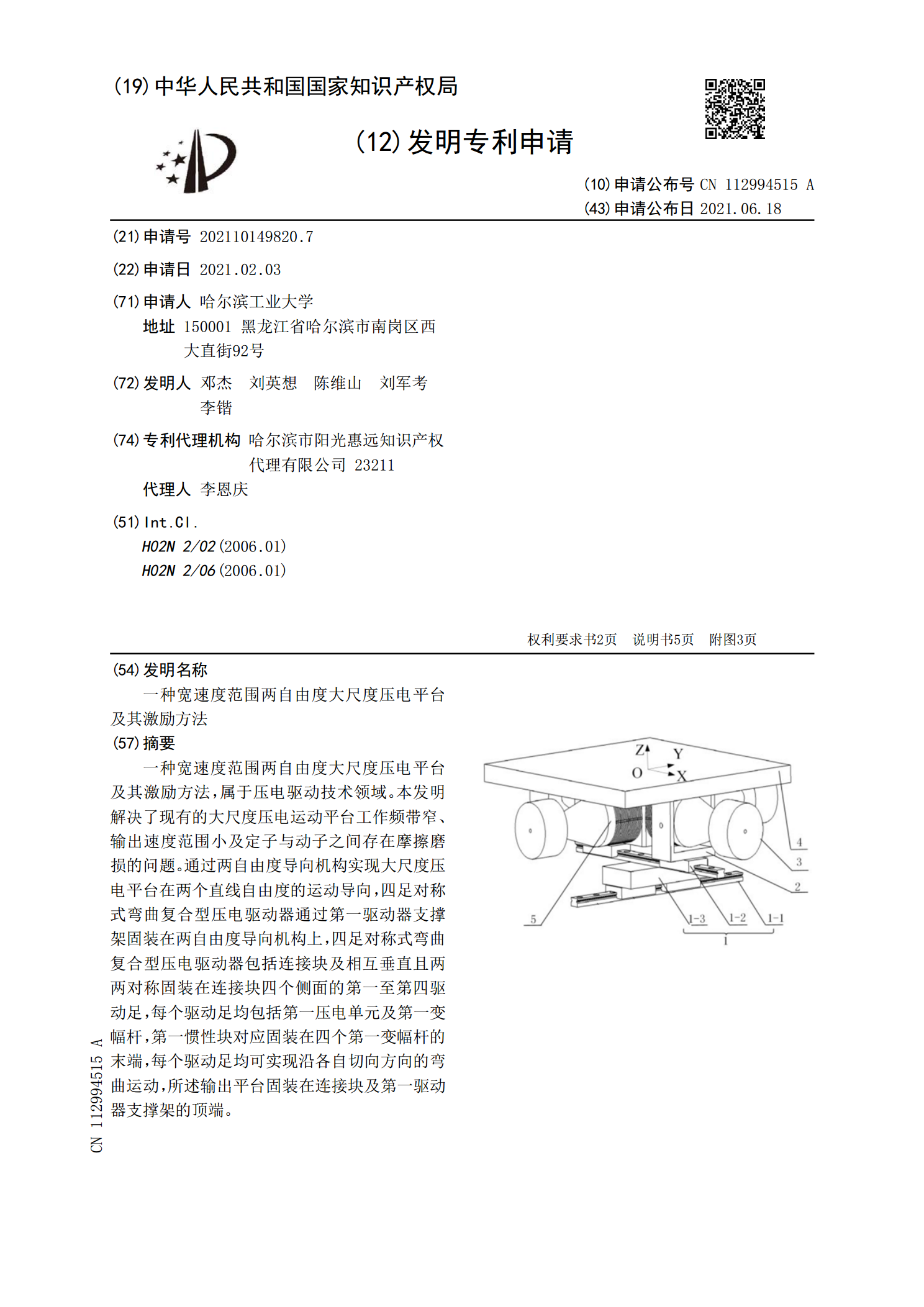
一种宽速度范围两自由度大尺度压电平台及其激励方法,属于压电驱动技术领域。本发明解决了现有的大尺度压电运动平台工作频带窄、输出速度范围小及定子与动子之间存在摩擦磨损的问题。通过两自由度导向机构实现大尺度压电平台在两个直线自由度的运动导向,四足对称式弯曲复合型压电驱动器通过第一驱动器支撑架固装在两自由度导向机构上,四足对称式弯曲复合型压电驱动器包括连接块及相互垂直且两两对称固装在连接块四个侧面的第一至第四驱动足,每个驱动足均包括第一压电单元及第一变幅杆,第一惯性块对应固装在四个第一变幅杆的末端,每个驱动足均可
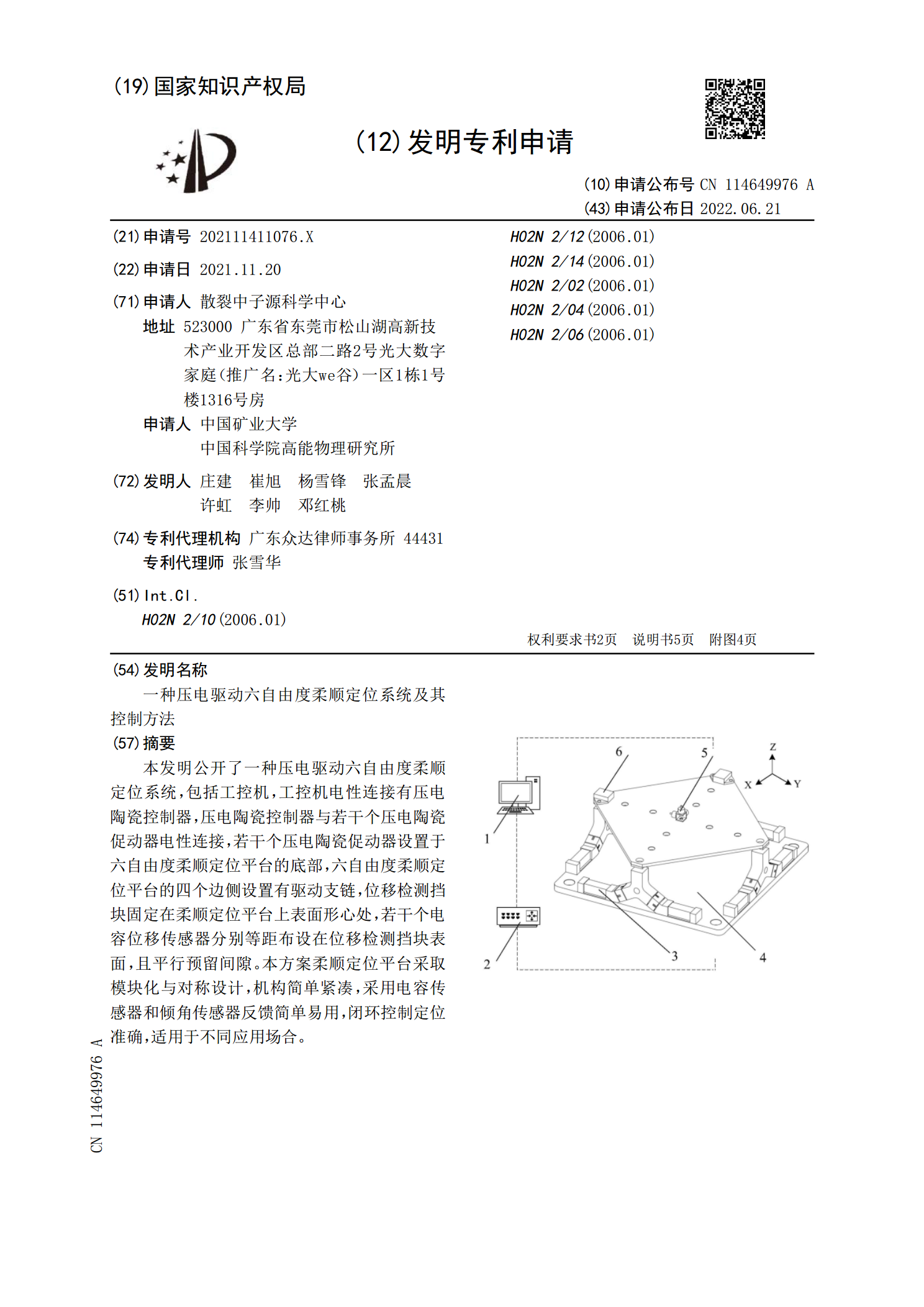
一种压电驱动六自由度柔顺定位系统及其控制方法.pdf
本发明公开了一种压电驱动六自由度柔顺定位系统,包括工控机,工控机电性连接有压电陶瓷控制器,压电陶瓷控制器与若干个压电陶瓷促动器电性连接,若干个压电陶瓷促动器设置于六自由度柔顺定位平台的底部,六自由度柔顺定位平台的四个边侧设置有驱动支链,位移检测挡块固定在柔顺定位平台上表面形心处,若干个电容位移传感器分别等距布设在位移检测挡块表面,且平行预留间隙。本方案柔顺定位平台采取模块化与对称设计,机构简单紧凑,采用电容传感器和倾角传感器反馈简单易用,闭环控制定位准确,适用于不同应用场合。
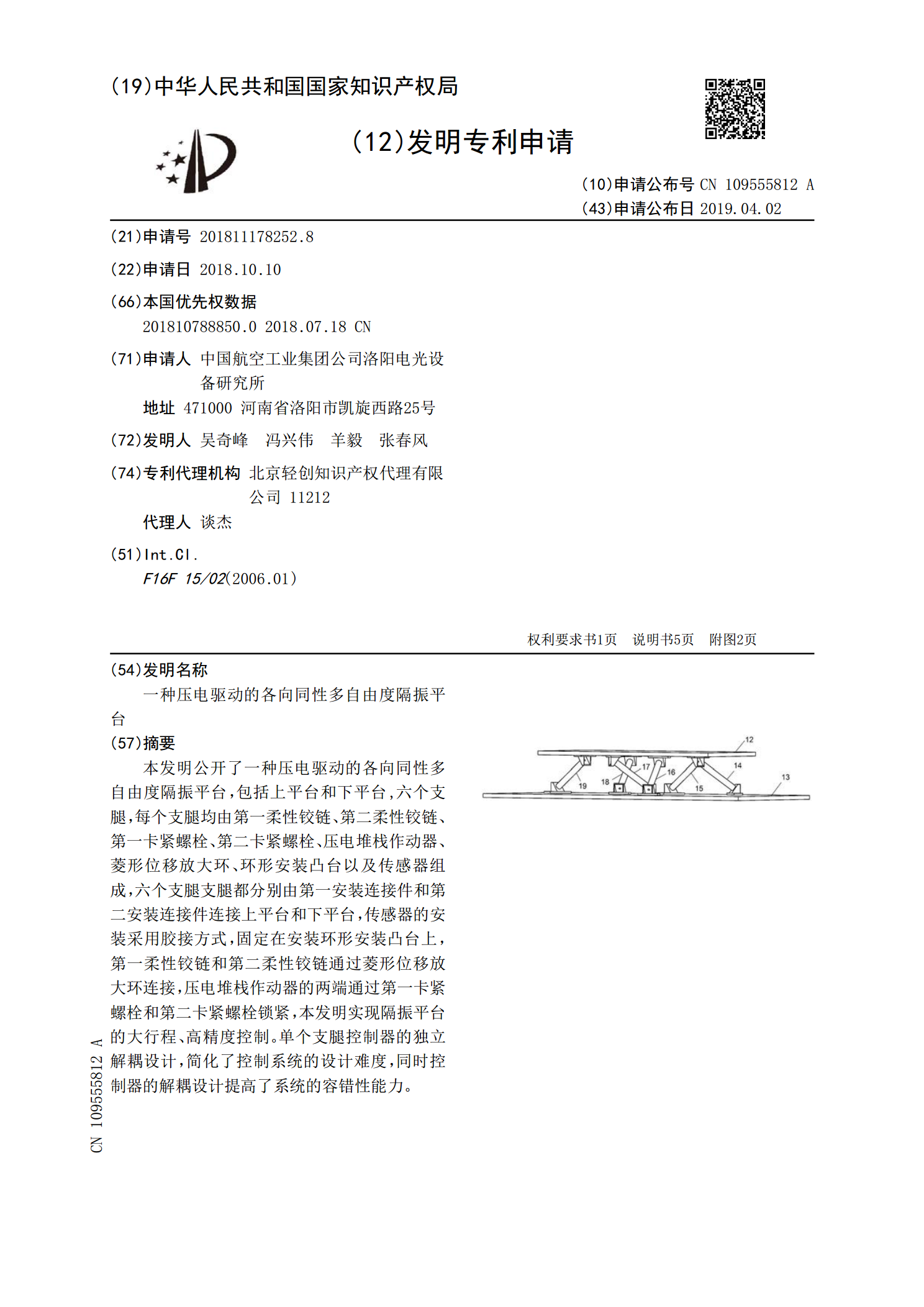
一种压电驱动的各向同性多自由度隔振平台.pdf
本发明公开了一种压电驱动的各向同性多自由度隔振平台,包括上平台和下平台,六个支腿,每个支腿均由第一柔性铰链、第二柔性铰链、第一卡紧螺栓、第二卡紧螺栓、压电堆栈作动器、菱形位移放大环、环形安装凸台以及传感器组成,六个支腿支腿都分别由第一安装连接件和第二安装连接件连接上平台和下平台,传感器的安装采用胶接方式,固定在安装环形安装凸台上,第一柔性铰链和第二柔性铰链通过菱形位移放大环连接,压电堆栈作动器的两端通过第一卡紧螺栓和第二卡紧螺栓锁紧,本发明实现隔振平台的大行程、高精度控制。单个支腿控制器的独立解耦设计,简

两自由度压电惯性驱动管道机器人.pdf
本发明涉及一种两自由度压电惯性驱动管道机器人,其包括第一主体、第二主体、柔性连接板、板簧片、压电堆、支撑足、压电振子组件和压电微型注射器,柔性连接板的第一端与第一主体连接,且其第二端通过调节螺栓与板簧片的第一端固定连接,板簧片的第二端上部设有摩擦球,压电堆的第一端和第二端分别与第二主体和柔性连接板连接,支撑足的第一端和第二端分别通过第一螺栓和第二螺栓与第一主体以及第二主体连接,且压电振子设于第一主体上,压电微型注射器设于第二主体上。本发明的管道机器人结构简单,可以在管道内实现多自由度运动,并且第一主体和第