
一种宽速度范围两自由度大尺度压电平台及其激励方法.pdf

听云****君哇

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种宽速度范围两自由度大尺度压电平台及其激励方法.pdf
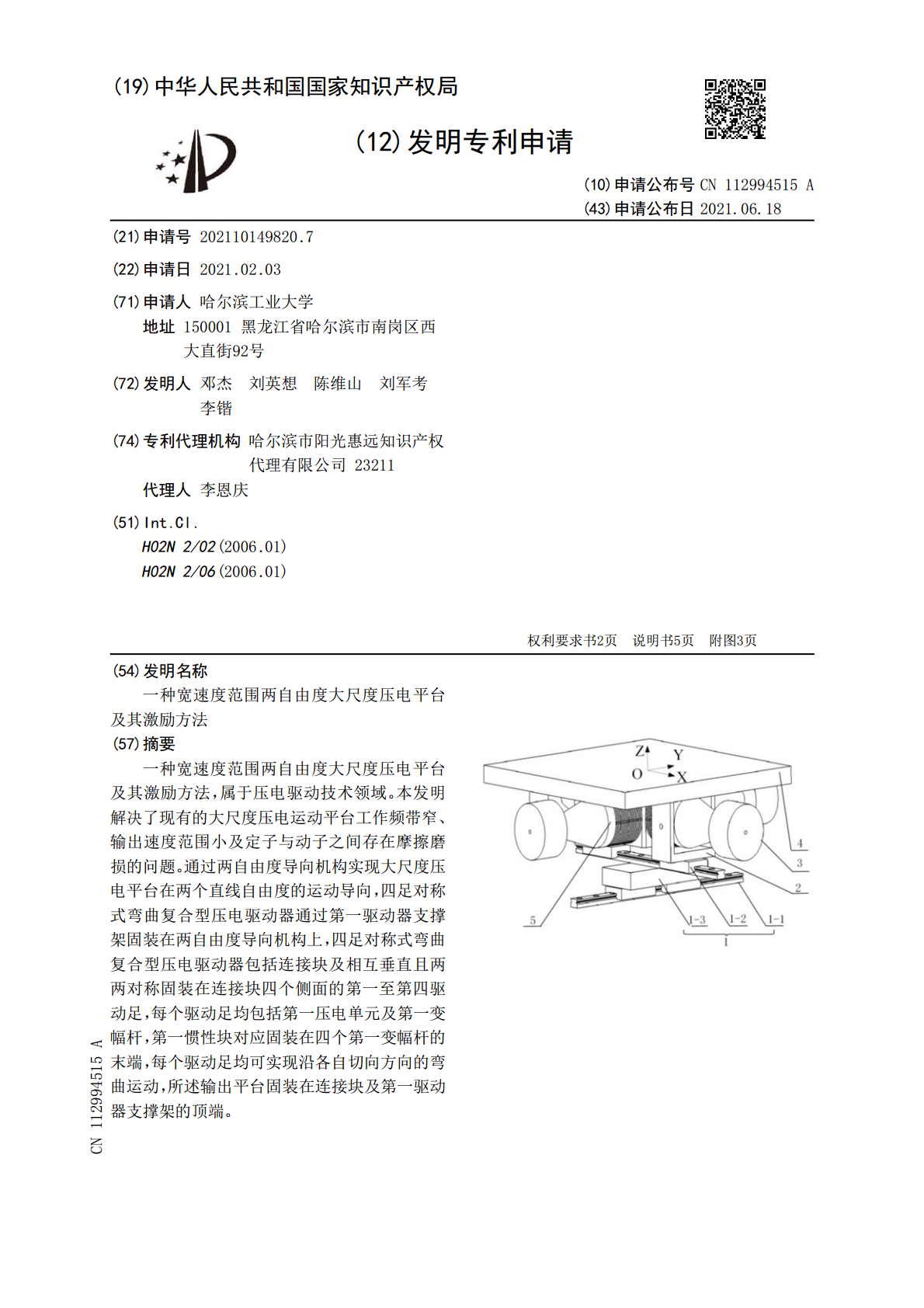
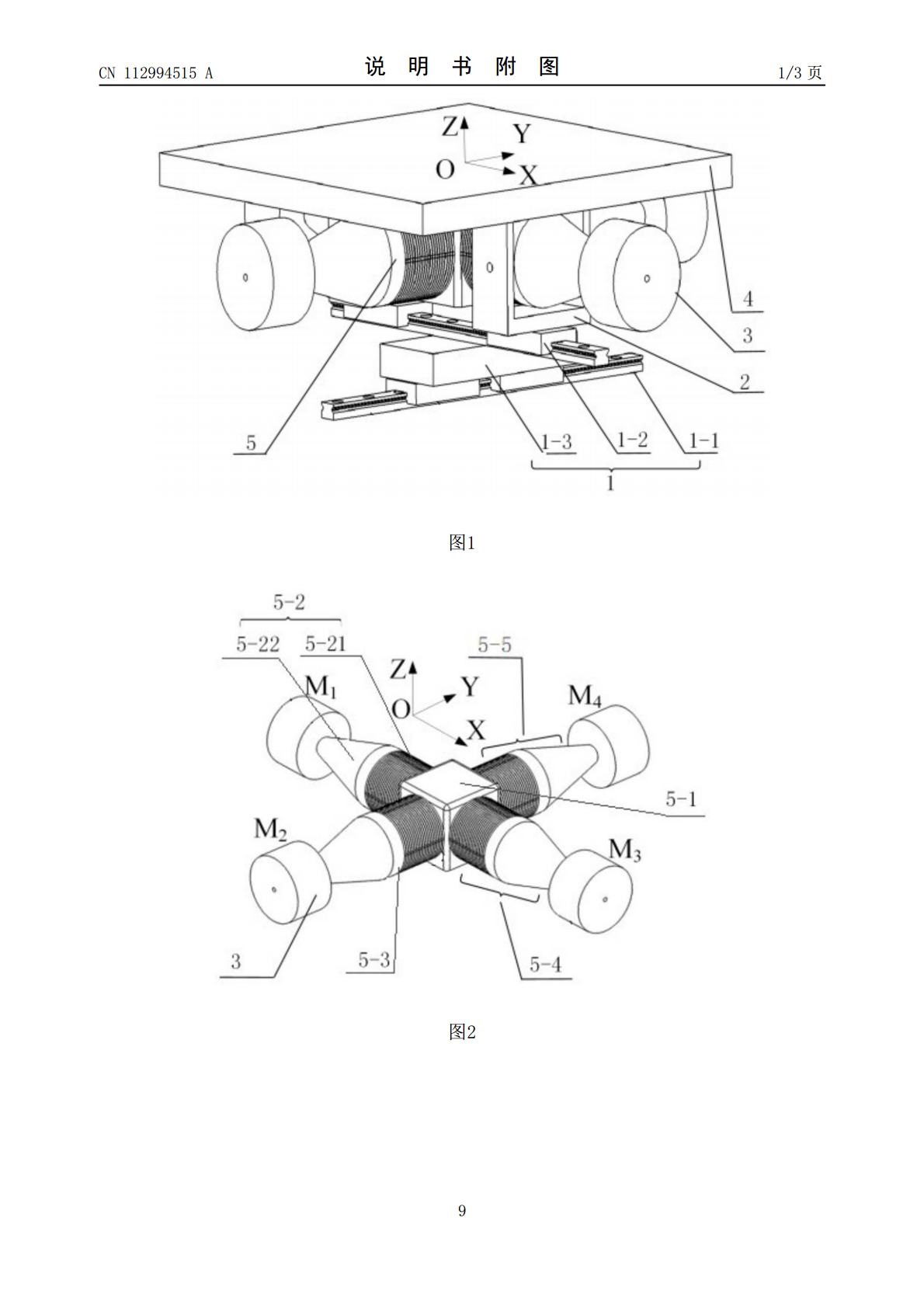
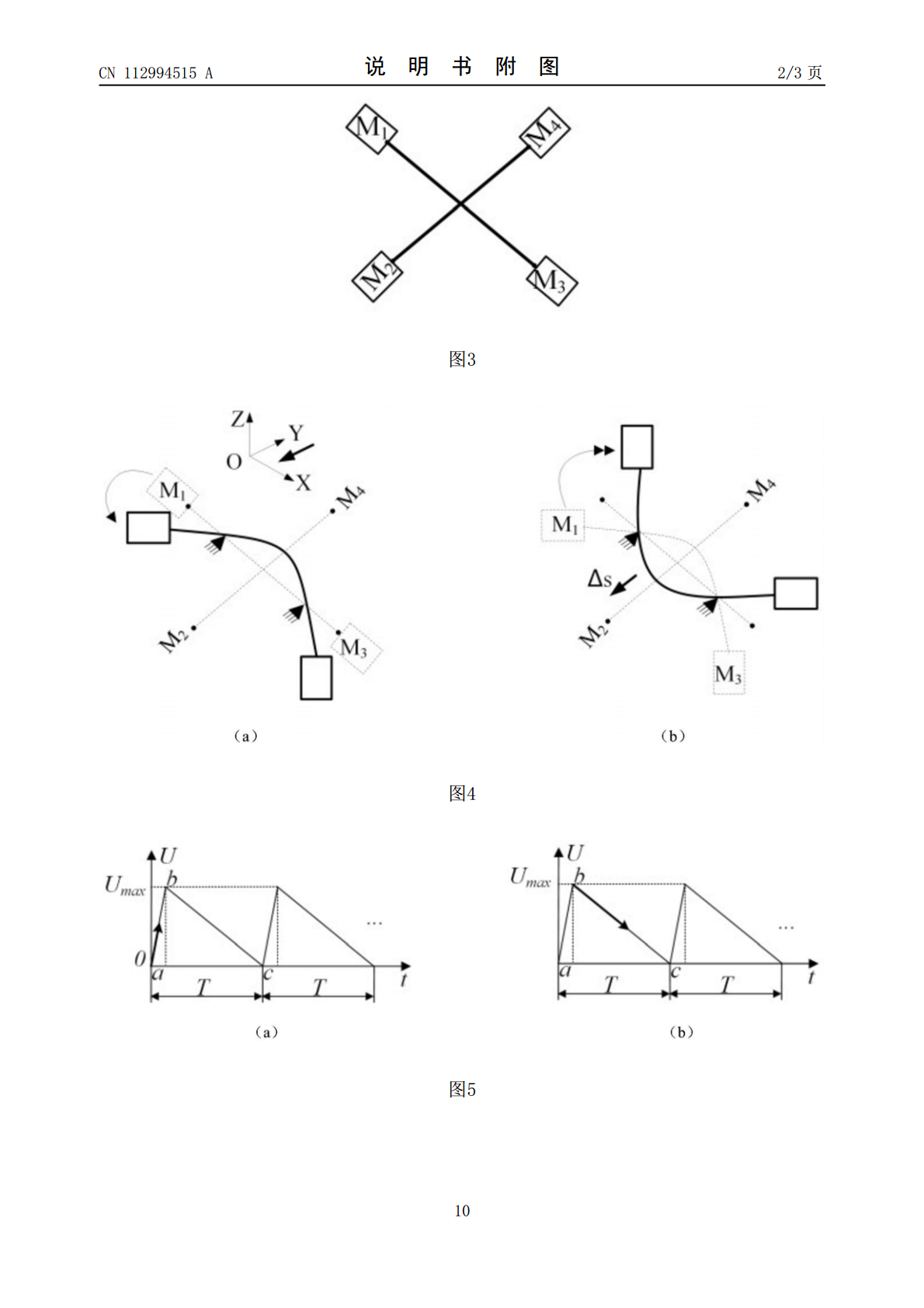
一种宽速度范围两自由度大尺度压电平台及其激励方法,属于压电驱动技术领域。本发明解决了现有的大尺度压电运动平台工作频带窄、输出速度范围小及定子与动子之间存在摩擦磨损的问题。通过两自由度导向机构实现大尺度压电平台在两个直线自由度的运动导向,四足对称式弯曲复合型压电驱动器通过第一驱动器支撑架固装在两自由度导向机构上,四足对称式弯曲复合型压电驱动器包括连接块及相互垂直且两两对称固装在连接块四个侧面的第一至第四驱动足,每个驱动足均包括第一压电单元及第一变幅杆,第一惯性块对应固装在四个第一变幅杆的末端,每个驱动足均可
一种两自由度压电驱动平台及其设计方法.pdf
本发明公开了一种两自由度压电驱动平台及其设计方法。所述两自由度压电驱动平台包括支链l1、支链l2和支链l3,所述支链l1的A1处与定平台(1)固定连接,所述支链l1的B1处通过球副S1与动平台(2)相连接,所述支链l2的A2处通过虎克铰U与定平台(1)相连,所述支链l2的B2处通过球副S2与动平台(2)相连,所述支链l3的A3处通过转动副R与定平台(1)连接,所述支链l3的B3处通过球副S3与动平台(2)相连接,所述支链l3的中间套接移动副P。本发明解决了传统电磁式电机、液压驱动的弊端以及目前并联机构定位
一种压电驱动六自由度柔顺定位系统及其控制方法.pdf
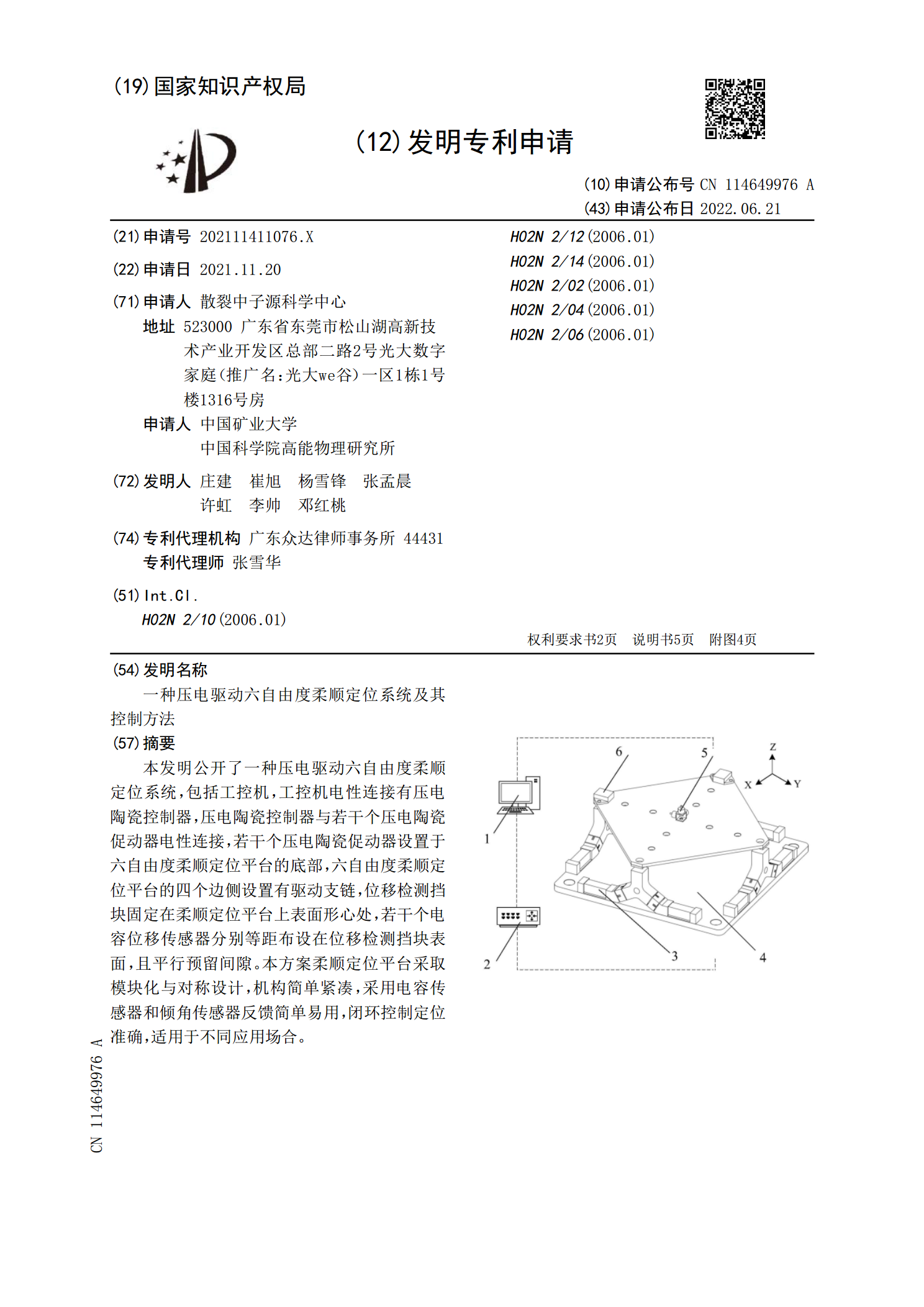
本发明公开了一种压电驱动六自由度柔顺定位系统,包括工控机,工控机电性连接有压电陶瓷控制器,压电陶瓷控制器与若干个压电陶瓷促动器电性连接,若干个压电陶瓷促动器设置于六自由度柔顺定位平台的底部,六自由度柔顺定位平台的四个边侧设置有驱动支链,位移检测挡块固定在柔顺定位平台上表面形心处,若干个电容位移传感器分别等距布设在位移检测挡块表面,且平行预留间隙。本方案柔顺定位平台采取模块化与对称设计,机构简单紧凑,采用电容传感器和倾角传感器反馈简单易用,闭环控制定位准确,适用于不同应用场合。

一种应用于LDO的宽范围稳压电路.docx
一种应用于LDO的宽范围稳压电路一、引言随着移动终端设备等电子产品的广泛应用,对电源系统的质量要求也越来越高,其中关键的一环就是电源系统的稳压性能。在电源系统中,低压差稳压器(LDO)是一种常见的稳压电路,具有高效、低噪声、低漂移等优点,被广泛应用于各种移动设备、计算机、通讯等领域。为了满足不同的应用需求,需要设计出一些宽范围稳压电路,本文将对这方面的研究进行综述。二、LDO的基本原理LDO是一种单芯片稳压器件,其基本原理是将输入电压经过比较器比较后,控制驱动器的驱动,使其输出稳定电压。一般情况下,LDO

一种大负载宽范围的夹持器.pdf
本发明公开了一种采用连杆传动的宽范围、大负载夹持器,其包括有一个传动箱体、多个用于抓持物件的指部和一个用于与机器人连接的法兰;所述每一指部均包括有两个指杆,第一指杆采用齿轮驱动,第二指杆采用连杆驱动,通过所有指部及其指杆的联动,可以对不同直径大小的物体实现圆包络夹持。该夹持器仅由一个电机驱动,传动箱体内从电机到指杆的传动采用了同步带和齿轮组,且都布放于箱体内部。该夹持器具有与被抓取物接触点数多、负载大、抓持稳定性和可靠性高等特点。