
一种压电驱动六自由度柔顺定位系统及其控制方法.pdf

一吃****福乾


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种压电驱动六自由度柔顺定位系统及其控制方法.pdf
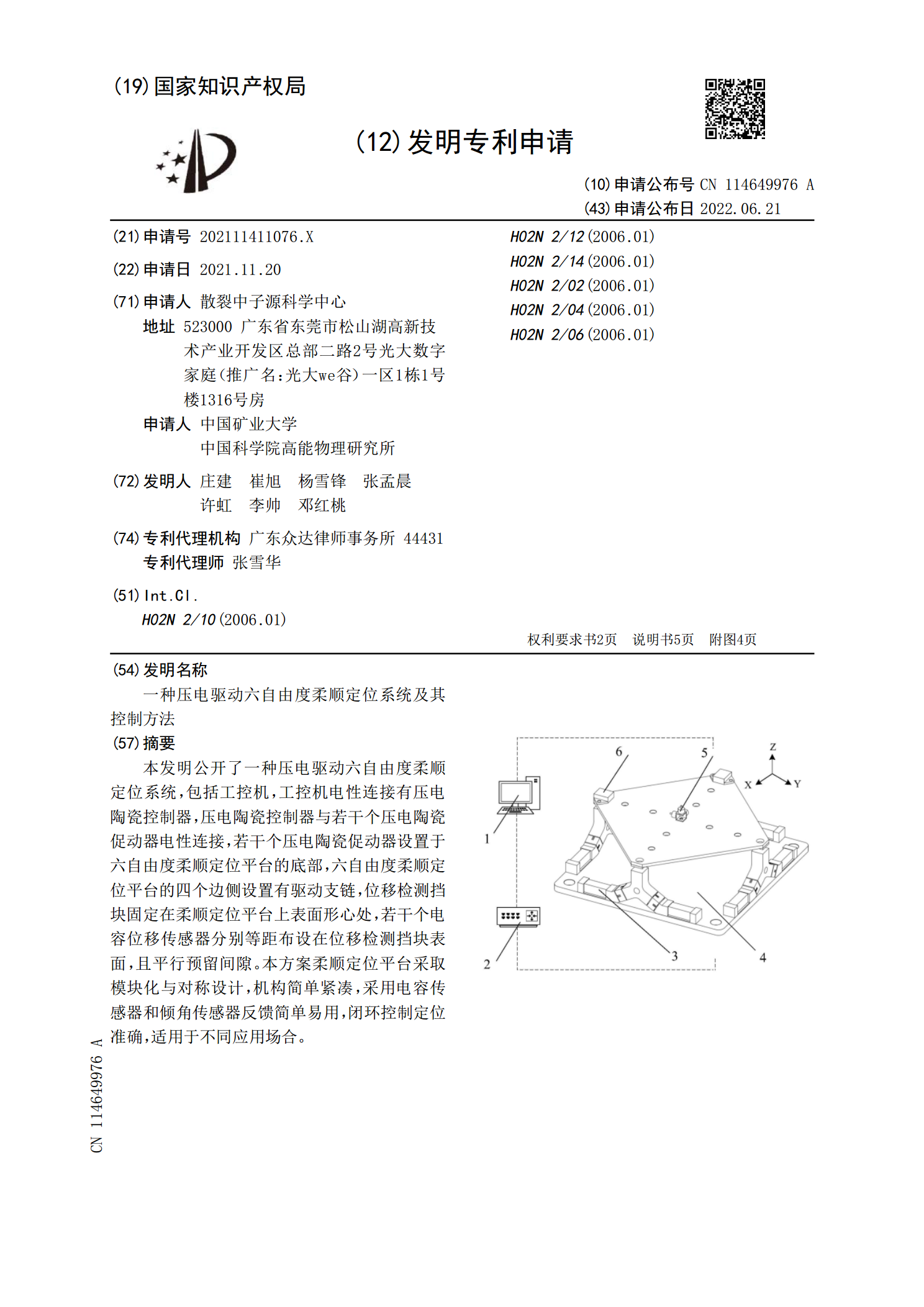
本发明公开了一种压电驱动六自由度柔顺定位系统,包括工控机,工控机电性连接有压电陶瓷控制器,压电陶瓷控制器与若干个压电陶瓷促动器电性连接,若干个压电陶瓷促动器设置于六自由度柔顺定位平台的底部,六自由度柔顺定位平台的四个边侧设置有驱动支链,位移检测挡块固定在柔顺定位平台上表面形心处,若干个电容位移传感器分别等距布设在位移检测挡块表面,且平行预留间隙。本方案柔顺定位平台采取模块化与对称设计,机构简单紧凑,采用电容传感器和倾角传感器反馈简单易用,闭环控制定位准确,适用于不同应用场合。

压电驱动三自由度柔顺精密定位平台研究.docx
压电驱动三自由度柔顺精密定位平台研究摘要:本文研究了一种压电驱动的三自由度柔顺精密定位平台。该平台采用了三种不同的压电陶瓷作为驱动元件,并结合三组不同的反馈控制设计了包括位置、速度和加速度等伺服控制系统。通过对平台进行系统测试和实验,证明了该平台具有精密、快速、准确的定位能力和柔顺性,可以满足工业和科研领域的精密控制需求。关键词:压电陶瓷;精密定位;柔顺性;伺服控制;工业和科研引言:随着现代制造技术和工业生产的日益发展,对薄而小的精密元件的定位和调节要求日益高。因此,高精度、高速度和柔顺性是现代定位平台的
一种两自由度压电驱动平台及其设计方法.pdf
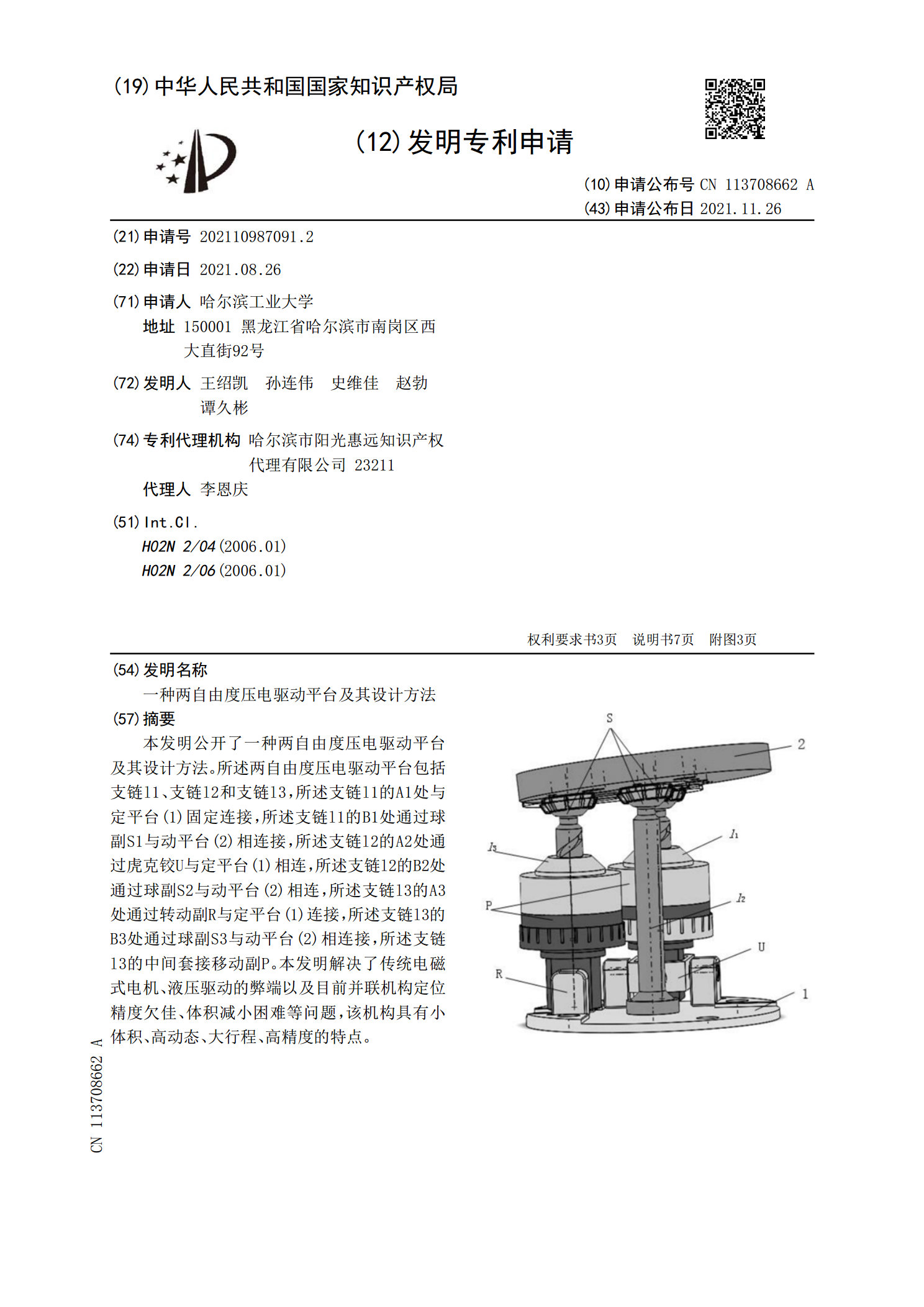
本发明公开了一种两自由度压电驱动平台及其设计方法。所述两自由度压电驱动平台包括支链l1、支链l2和支链l3,所述支链l1的A1处与定平台(1)固定连接,所述支链l1的B1处通过球副S1与动平台(2)相连接,所述支链l2的A2处通过虎克铰U与定平台(1)相连,所述支链l2的B2处通过球副S2与动平台(2)相连,所述支链l3的A3处通过转动副R与定平台(1)连接,所述支链l3的B3处通过球副S3与动平台(2)相连接,所述支链l3的中间套接移动副P。本发明解决了传统电磁式电机、液压驱动的弊端以及目前并联机构定位

一种电动客车的驱动系统及其驱动控制方法.pdf
本发明提出一种电动客车的驱动系统及其驱动控制方法,该系统包括:动力电池;与动力电池相连的多个第一轮边电机;控制多个第一轮边电机的多个第一电机控制器;与动力电池相连的多个第二轮边电机;控制多个第二轮边电机的多个第二电机控制器;整车控制器,整车控制器分别与多个第一电机控制器和多个第二电机控制器相连,整车控制器在电动客车运行过程中通过多个第一电机控制器和多个第二电机控制器控制多个第一轮边电机和多个第二轮边电机启动和切换工作。本发明可有效解决双层或加长纯电动客车的动力不足问题,提高驱动效率,改善横向摆动,更有效地

一种汽车、驱动系统及其控制方法.pdf
本发明公开一种汽车、驱动系统及其控制方法,其中,该驱动系统应用于汽车,包括第一驱动单元、第二驱动单元和减速单元;减速单元包括同轴设置的第一太阳轮和第二太阳轮,第一太阳轮啮合有第一行星轮,第二太阳轮啮合有第二行星轮,第一太阳轮和第一行星轮的中心距与第二太阳轮和第二行星轮的中心距相等,第一行星轮和第二行星轮连接于同一行星架,第二行星轮还啮合有内齿圈,内齿圈固定;第一驱动单元的第一驱动轴与第一太阳轮相连,第二驱动单元的第二驱动轴与第二太阳轮相连,行星架用于输出。本发明所提供驱动系统的结构更为紧凑,可方便整车布置