
用于自动驾驶车辆的导航路线规划方法.pdf

宏硕****mo


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于自动驾驶车辆的导航路线规划方法.pdf
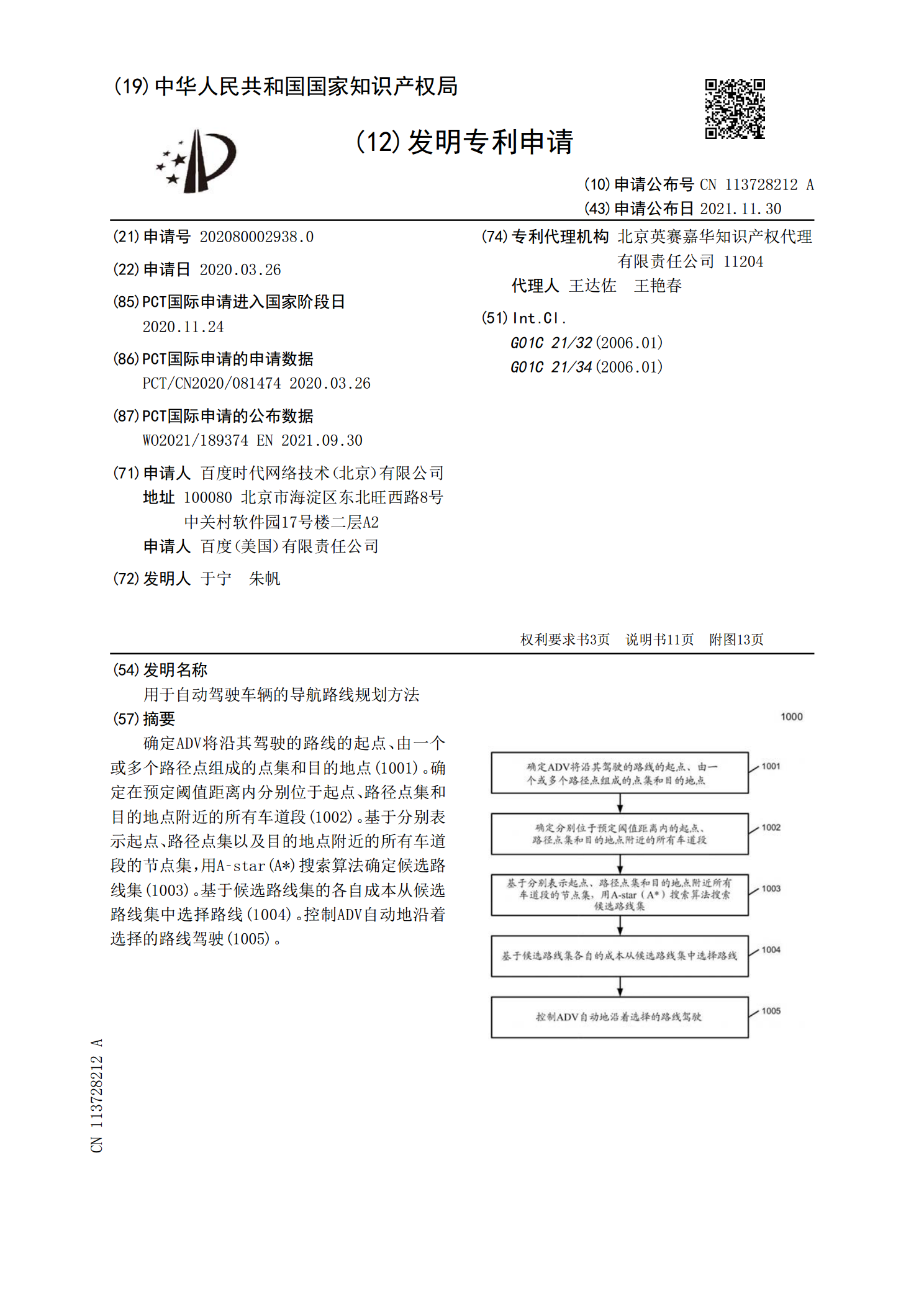
确定ADV将沿其驾驶的路线的起点、由一个或多个路径点组成的点集和目的地点(1001)。确定在预定阈值距离内分别位于起点、路径点集和目的地点附近的所有车道段(1002)。基于分别表示起点、路径点集以及目的地点附近的所有车道段的节点集,用A‑star(A*)搜索算法确定候选路线集(1003)。基于候选路线集的各自成本从候选路线集中选择路线(1004)。控制ADV自动地沿着选择的路线驾驶(1005)。

自动驾驶车辆和用于自动驾驶车辆的控制方法.pdf
本发明提供了一种自动驾驶车辆和一种用于自动驾驶车辆的控制方法。该自动驾驶车辆包括用户检测监测装置和起动控制装置。用户检测监测装置在自动驾驶车辆停在目的地之后检测离开自动驾驶车辆的用户作为下车用户并且监测下车用户。起动控制装置在检测到下车用户之后、满足起动条件之前保持自动驾驶车辆的停止状态,并且在满足起动条件的情况下允许自动驾驶车辆的起动。所述起动条件是以下条件之一:指示下车用户至少移出自动驾驶车辆周围的移动判定区域的条件;和指示下车用户存在于移动判定区域中但在同一位置停留持续特定时长或更长时间的条件。

用于自动驾驶车辆的风险提示方法、装置及自动驾驶车辆.pdf
本公开提供了一种用于自动驾驶车辆的风险提示方法、装置、设备、存储介质、计算机程序产品及自动驾驶车辆,涉及人工智能技术领域,尤其涉及自动驾驶技术领域。具体实现方案为:根据获取的行车先验信息,确定第一道路风险等级;根据获取的车端感知信息,确定第二道路风险等级;根据所述第一道路风险等级和第二道路风险等级中风险级别较高的一个,确定目标提示频率,其中,所述风险级别的高低与行车危险程度正相关;按照所述目标提示频率输出对应的提示信号,本公开能够提高驾驶的安全性,并通过动态调整提示频率,提高用户的辅助驾驶体验。

用于自动驾驶车辆的娱乐方法.pdf
本发明涉及用于自动驾驶车辆的娱乐方法。用于自动驾驶车辆的娱乐装置和方法使在乘客坐在自动驾驶车辆的座椅上的状态下乘客能够在观看安装在座椅周围的显示器的游戏执行屏幕的同时玩游戏,并基于在安装在座椅上的身体压力传感器中感测乘客的身体压力分布的信号以及在安装在座椅上的触摸板中感测乘客的触摸压力的信号来执行和进行游戏,从而允许乘客在移动他或她的身体时可享受与身体压力和/或触摸信号有关的各种游戏。

用于车辆汇流的自动驾驶控制方法.pdf
本发明涉及一种用于车辆汇流的自动驾驶控制方法,判断本车在处于汇流区域并且即将通过道路的出口或者入口的情况下,计算本车与其他车辆的相对位置、车速等参数,并计算本车保持当前车速的情况下是否会与其他车辆相撞,并基于计算结果来采取相应的措施,使车辆能够安全地通过该汇流区域。