
一种新能源汽车的主动制动系统及其方法.pdf

Ch****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种新能源汽车的主动制动系统及其方法.pdf
本发明实施例提供一种新能源汽车的主动制动系统及其方法,主动制动系统包括:速度传感器,用于时实检测新能源汽车的车速,产生车速信号;红外距离传感器,用于时实检测新能源汽车与其行进方向前方的目标的距离,产生目标距离信号;摄像识别装置,用于识别目标的类型,产生目标类型信号,处理器接收目标距离信号且目标距离信号的值小于预设的阀值距离时,触发摄像识别装置工作并反馈目标类型信号至处理器,且处理器根据目标距离信号、目标类型信号及车速信号,按预设规则生成主动制动信号输出至驱动控制器和制动系统,以触发驱动控制器和制动系统共同

一种新能源汽车制动系统及其使用方法.pdf
本发明提供一种新能源汽车制动系统及其使用方法,包括汽车框架和踏板以及转轴,踏板的底端设置有传动轴,传动轴的表面设置有固定轴,固定轴的一侧设置有固定座,汽车框架的表面设置有控制台,汽车框架的底端设置有弹簧,弹簧的一侧设置有插杆,插杆的一侧设置有传动杆,传动杆的外侧设置有油缸,传动杆的表面设置有第一固定杆,第一固定杆的外侧设置有L型杆,L型杆的表面设置有第二固定杆,L型杆的一端设置有固定盘。通过设置悬挂轮、L型杆、第一固定杆和第二固定杆,使悬挂轮可以通过L型杆的拉伸实现上下移动,从而在使用时着地摩擦,不使用时

一种汽车线控制动系统及其制动方法.pdf
本发明公开了一种汽车线控制动系统及其制动方法,属于电动汽车制动技术领域,包括液压制动单元,用于四个轮缸液压管路的油压进行分配,实现四个车轮轮缸的制动;踏板模拟单元,分别与液压制动单元、建压单元、油壶、车辆控制器相连,用于识别驾驶员制动意图,并将信号传送至车辆控制器进行车辆制动。建压单元,分别与液压制动单元、踏板模拟单元、油壶、车辆控制器相连,用于在车辆制动过程中进行制动助力,并将液压力传送至液压制动单元,完成线控制动。本发明既具备传统线控制动系统的压力容易控制,可模拟踏板感觉的功能;又具备自动驾驶的主动制
一种新能源汽车制动系统.pdf
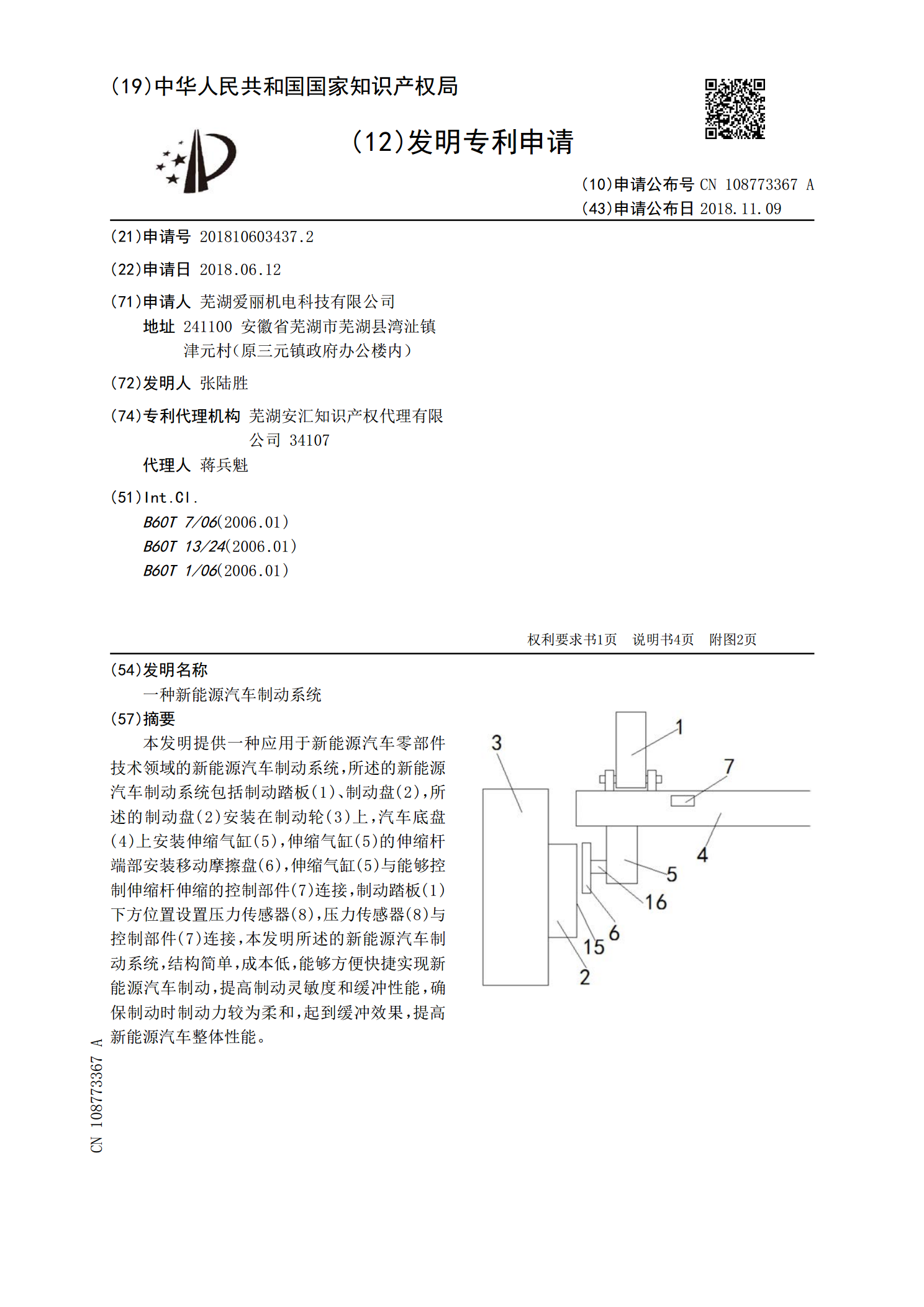
本发明提供一种应用于新能源汽车零部件技术领域的新能源汽车制动系统,所述的新能源汽车制动系统包括制动踏板(1)、制动盘(2),所述的制动盘(2)安装在制动轮(3)上,汽车底盘(4)上安装伸缩气缸(5),伸缩气缸(5)的伸缩杆端部安装移动摩擦盘(6),伸缩气缸(5)与能够控制伸缩杆伸缩的控制部件(7)连接,制动踏板(1)下方位置设置压力传感器(8),压力传感器(8)与控制部件(7)连接,本发明所述的新能源汽车制动系统,结构简单,成本低,能够方便快捷实现新能源汽车制动,提高制动灵敏度和缓冲性能,确保制动时制动力

一种汽车制动试验系统及其方法.pdf
本发明提出了一种汽车制动试验系统,包括数采模块,数采模块速度采集端连接速度计速度输出端,数采模块陀螺仪信号输入端连接陀螺仪信号输出端,数采模块位置信号输入端连接GPS模块位置信号输出端,数采模块轮胎压力数据采集端连接轮胎压力检测模块数据采集输出端,数采模块储气筒压力数据采集端连接储气筒压力检测模块数据采集输出端,数采模块轮胎温度输入端连接轮胎温度检测模块输出端,数采模块制动鼓温度输入端连接制动鼓温度检测模块输出端,数采模块车辆CAN总线信号输入端连接车辆CAN总线数据输出端,数采模块刹车踏板力度信号输入端