
一种无人机栖停装置及栖停方法.pdf

闪闪****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机栖停装置及栖停方法.pdf
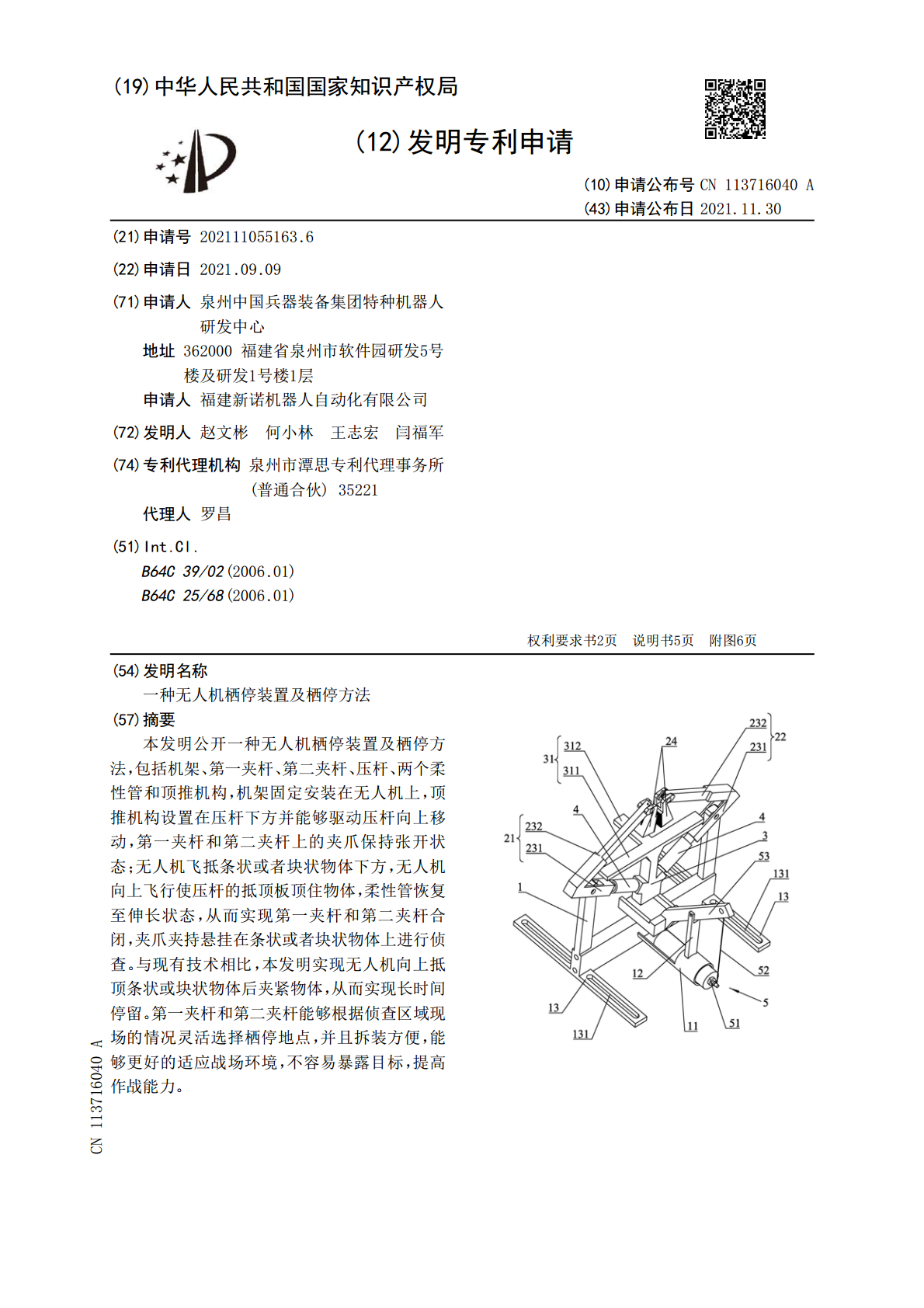
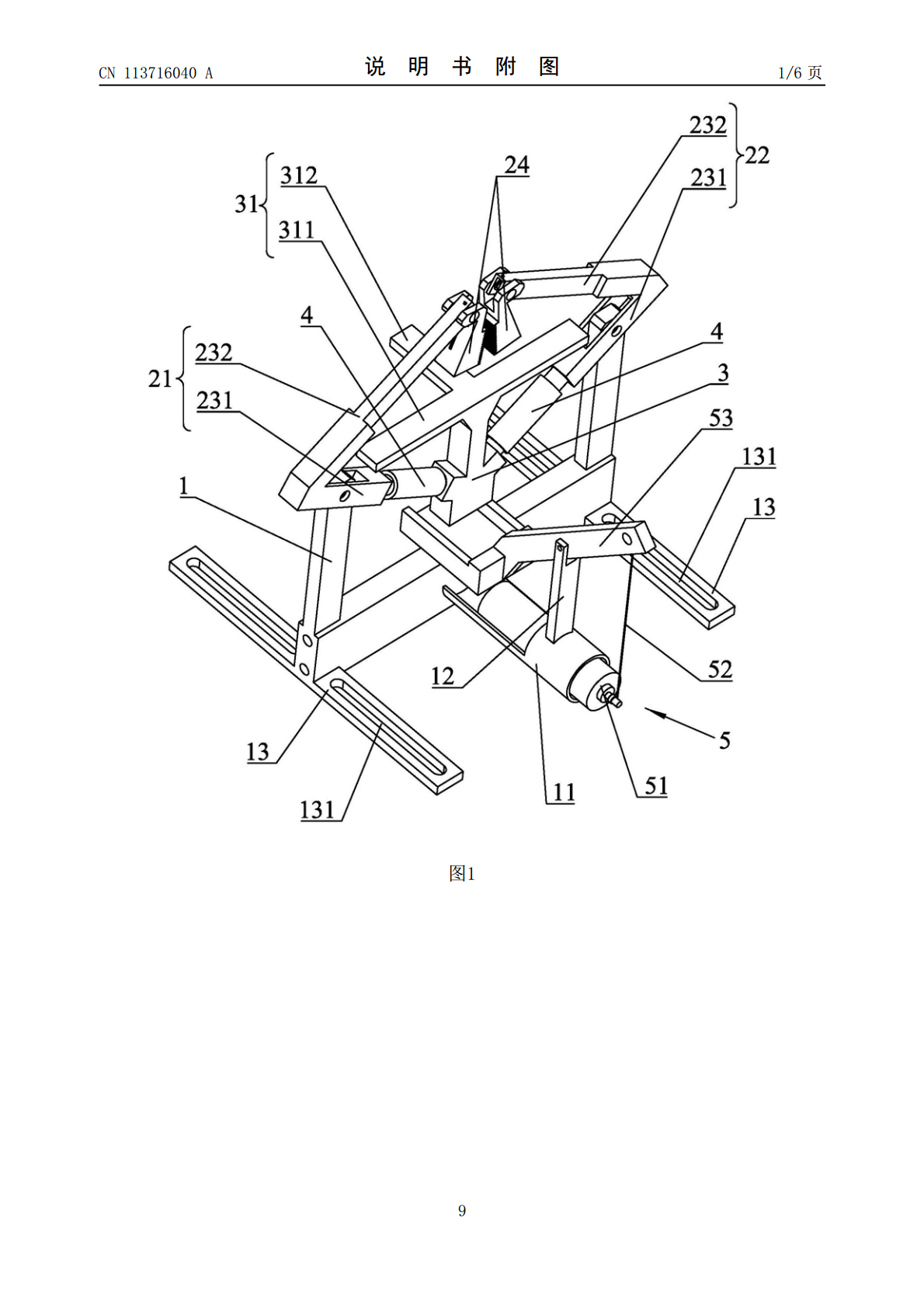
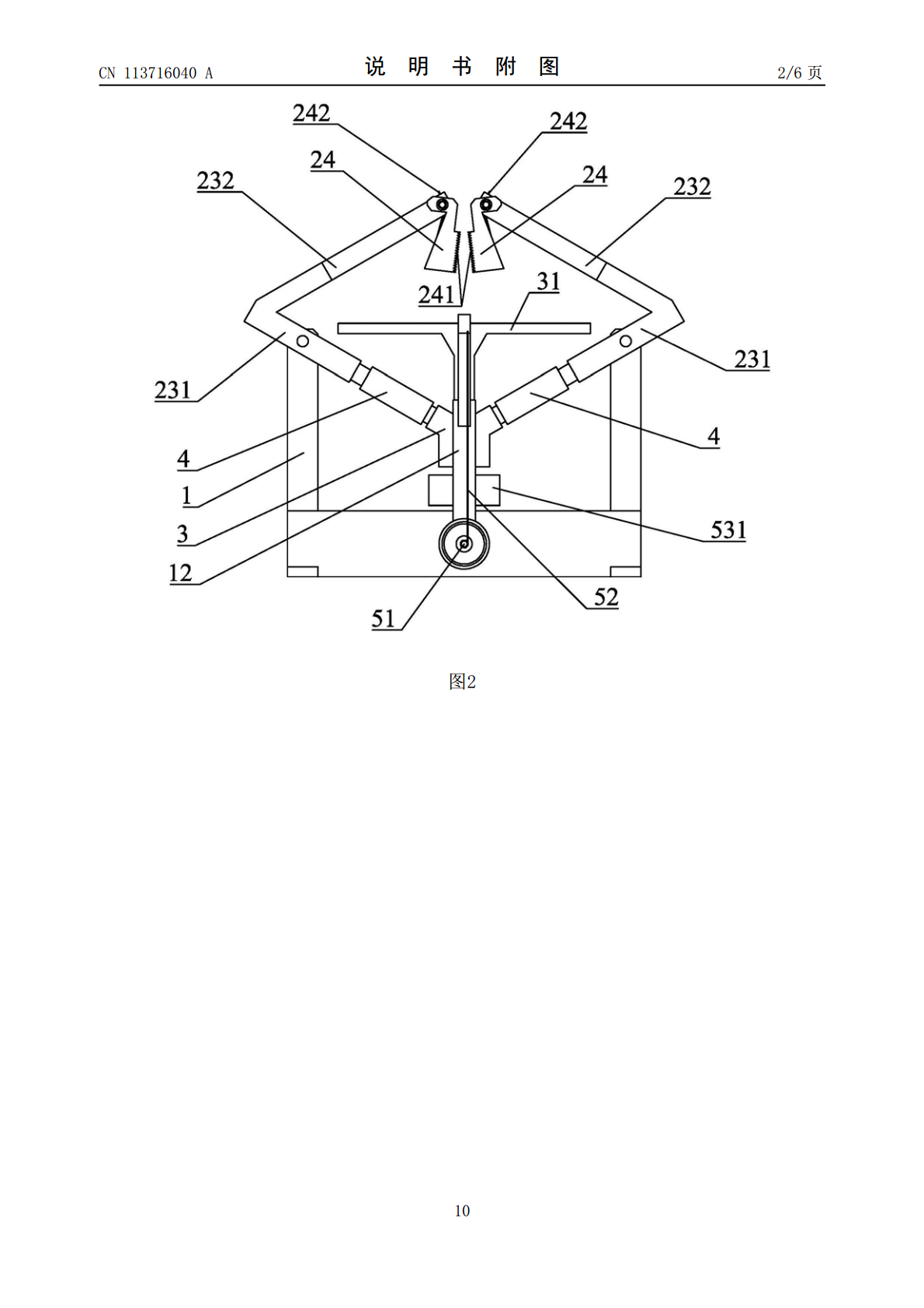
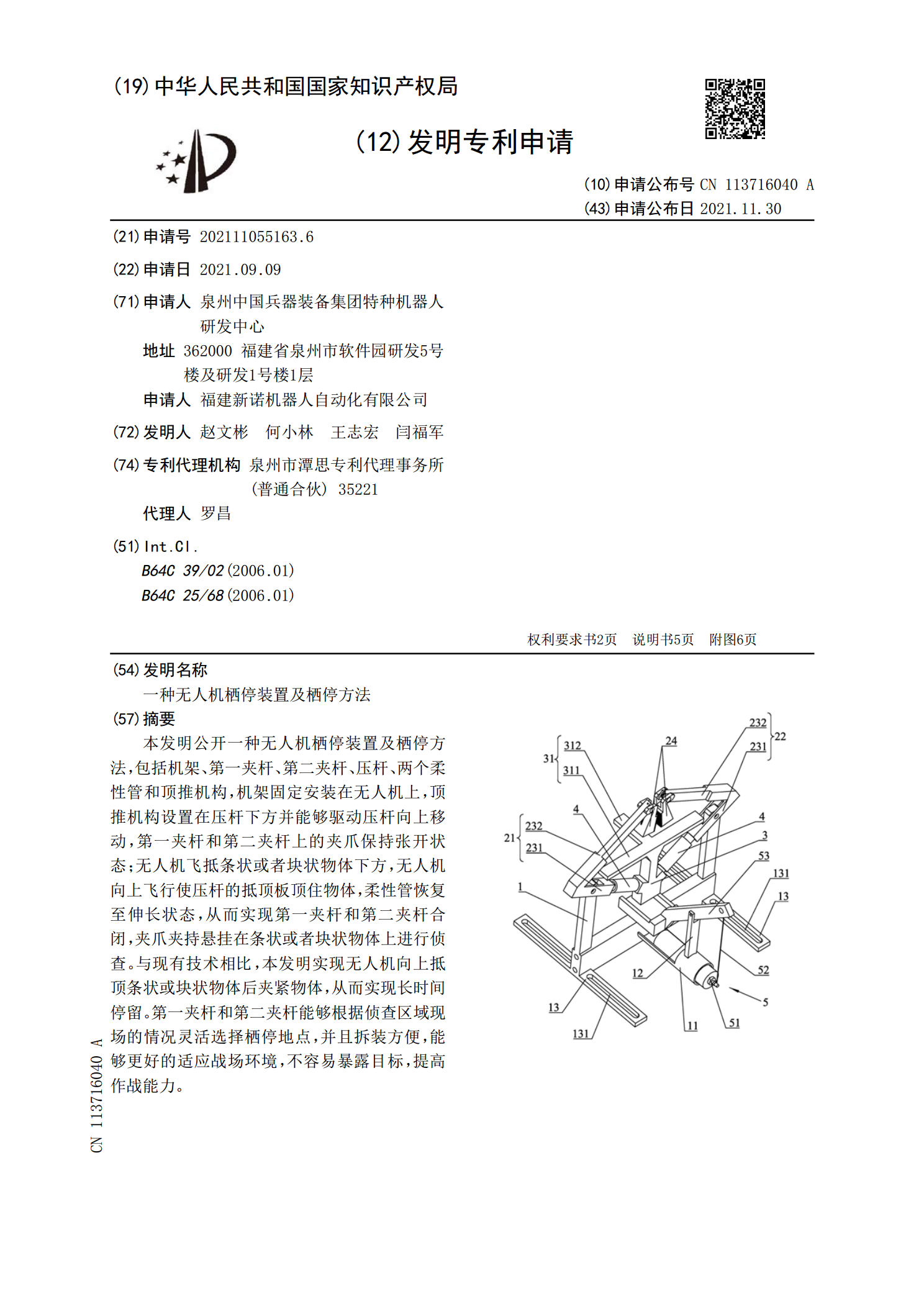
本发明公开一种无人机栖停装置及栖停方法,包括机架、第一夹杆、第二夹杆、压杆、两个柔性管和顶推机构,机架固定安装在无人机上,顶推机构设置在压杆下方并能够驱动压杆向上移动,第一夹杆和第二夹杆上的夹爪保持张开状态;无人机飞抵条状或者块状物体下方,无人机向上飞行使压杆的抵顶板顶住物体,柔性管恢复至伸长状态,从而实现第一夹杆和第二夹杆合闭,夹爪夹持悬挂在条状或者块状物体上进行侦查。与现有技术相比,本发明实现无人机向上抵顶条状或块状物体后夹紧物体,从而实现长时间停留。第一夹杆和第二夹杆能够根据侦查区域现场的情况灵活选
无人机驻停装置.pdf
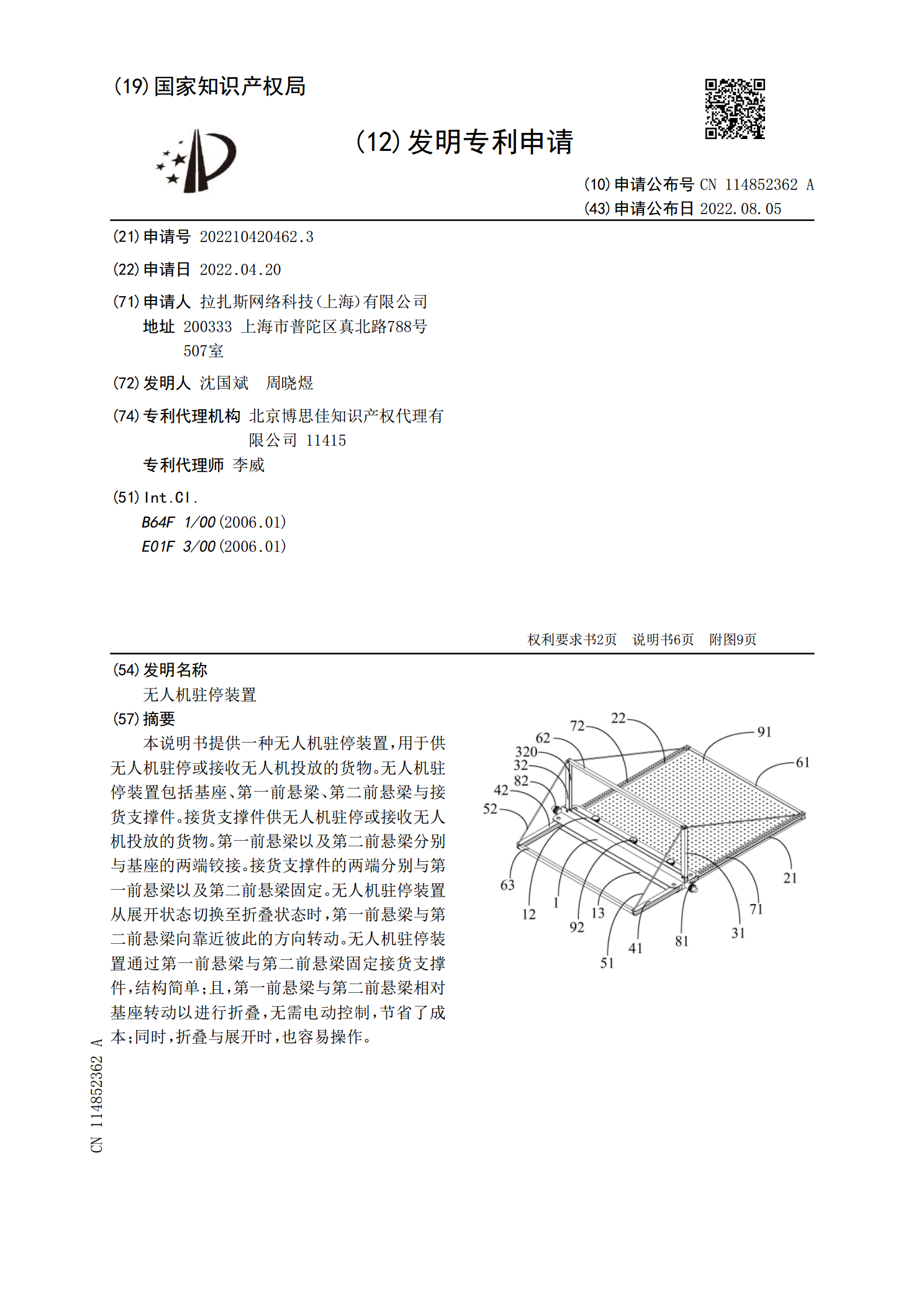
本说明书提供一种无人机驻停装置,用于供无人机驻停或接收无人机投放的货物。无人机驻停装置包括基座、第一前悬梁、第二前悬梁与接货支撑件。接货支撑件供无人机驻停或接收无人机投放的货物。第一前悬梁以及第二前悬梁分别与基座的两端铰接。接货支撑件的两端分别与第一前悬梁以及第二前悬梁固定。无人机驻停装置从展开状态切换至折叠状态时,第一前悬梁与第二前悬梁向靠近彼此的方向转动。无人机驻停装置通过第一前悬梁与第二前悬梁固定接货支撑件,结构简单;且,第一前悬梁与第二前悬梁相对基座转动以进行折叠,无需电动控制,节省了成本;同时,
一种无人机载迫停装置.pdf
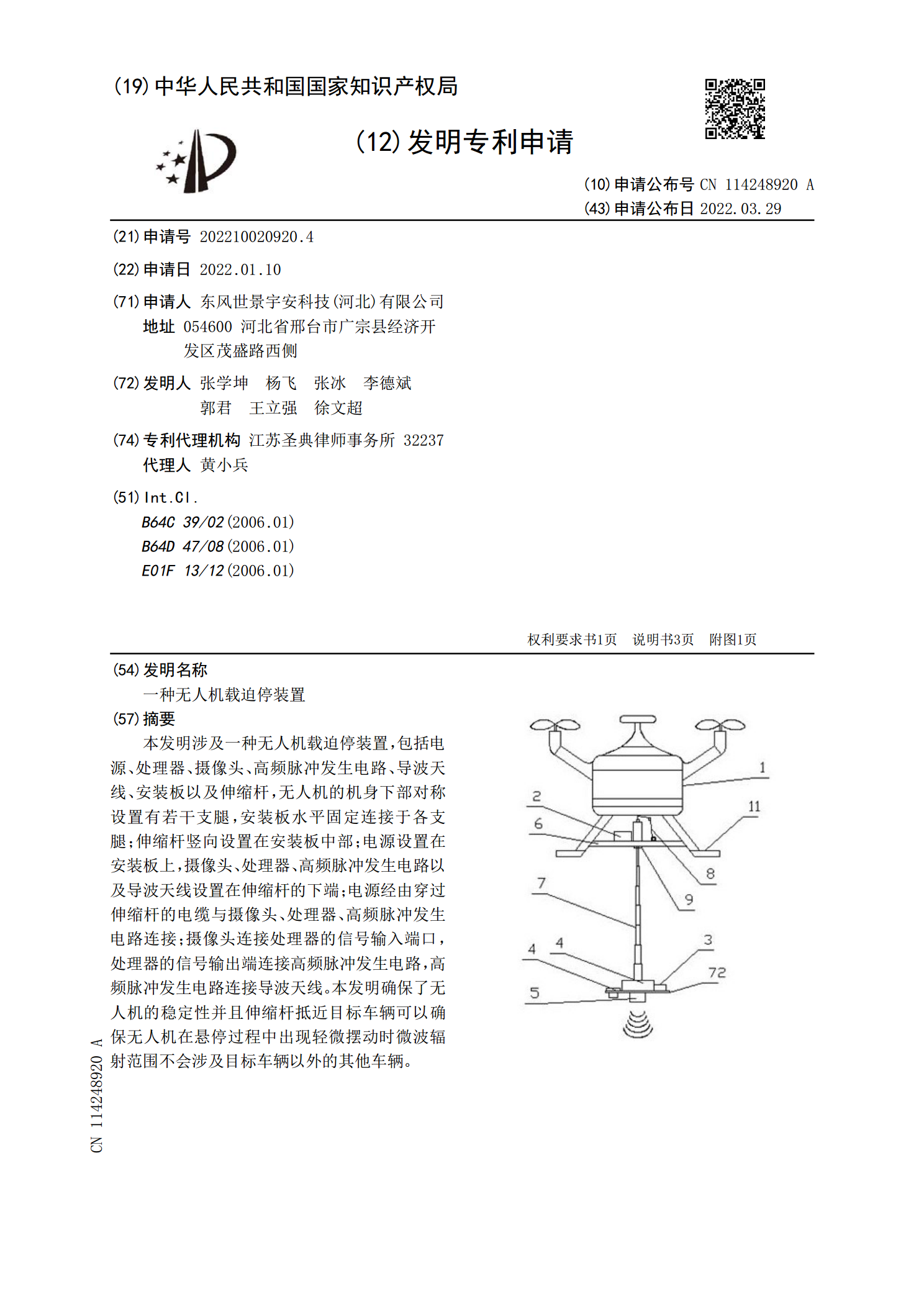
本发明涉及一种无人机载迫停装置,包括电源、处理器、摄像头、高频脉冲发生电路、导波天线、安装板以及伸缩杆,无人机的机身下部对称设置有若干支腿,安装板水平固定连接于各支腿;伸缩杆竖向设置在安装板中部;电源设置在安装板上,摄像头、处理器、高频脉冲发生电路以及导波天线设置在伸缩杆的下端;电源经由穿过伸缩杆的电缆与摄像头、处理器、高频脉冲发生电路连接;摄像头连接处理器的信号输入端口,处理器的信号输出端连接高频脉冲发生电路,高频脉冲发生电路连接导波天线。本发明确保了无人机的稳定性并且伸缩杆抵近目标车辆可以确保无人机在

一种三栖无人机.pdf
本发明公开一种三栖无人机,包括密封的机身、基于开源的Arduino平台利用遥控器实现控制的MWC飞行控制固件、四旋翼,所述的四旋翼包括对称分布在机身两侧各两个第一防水无刷电机,每个第一防水无刷电机的电机轴固设一个三叶螺旋桨,所述的三叶螺旋桨的端部固接圆形轮圈,所述的第一防水无刷电机的轴向可在垂直于水平面和平行于水平面之间转换;还包括对称固设在机身两侧的螺旋桨推进器。与现有技术相比,本发明应用领域广泛,涵盖空中、陆地和海洋,能够高精度完成三栖作业,便于携带,易于操作,配以各种传感器模块,能够实现对灾害救援现

一种三栖无人机.pdf
本发明公开一种三栖无人机,本发明通过在机身内部设置第一丝杆步进电机拉动或推移滑块以调整机翼后掠角度;在两机翼一端设置用于垂直升降的第一舵机、第一无刷电机和第一螺旋桨,在机身尾部设置用于无人机向前推进的第二舵机、第二无刷电机以及第二螺旋桨;在机身底部一前一后设置车轮起落架孔,通过第三舵机驱动车轮起落架穿过车轮起落架孔以使无人机能够可靠进行平稳着落;通过电机对车轮进行驱动,使得无人机能够在陆地进行行走。无人机通过设置于机身内的水泵将水吸入储水器内,使无人机重量增加,以适应不同水位深度。本发明相对于现有技术的无