
一种辅助泊车装置、系统及辅助泊车方法.pdf

骊蓉****23


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种辅助泊车装置、系统及辅助泊车方法.pdf
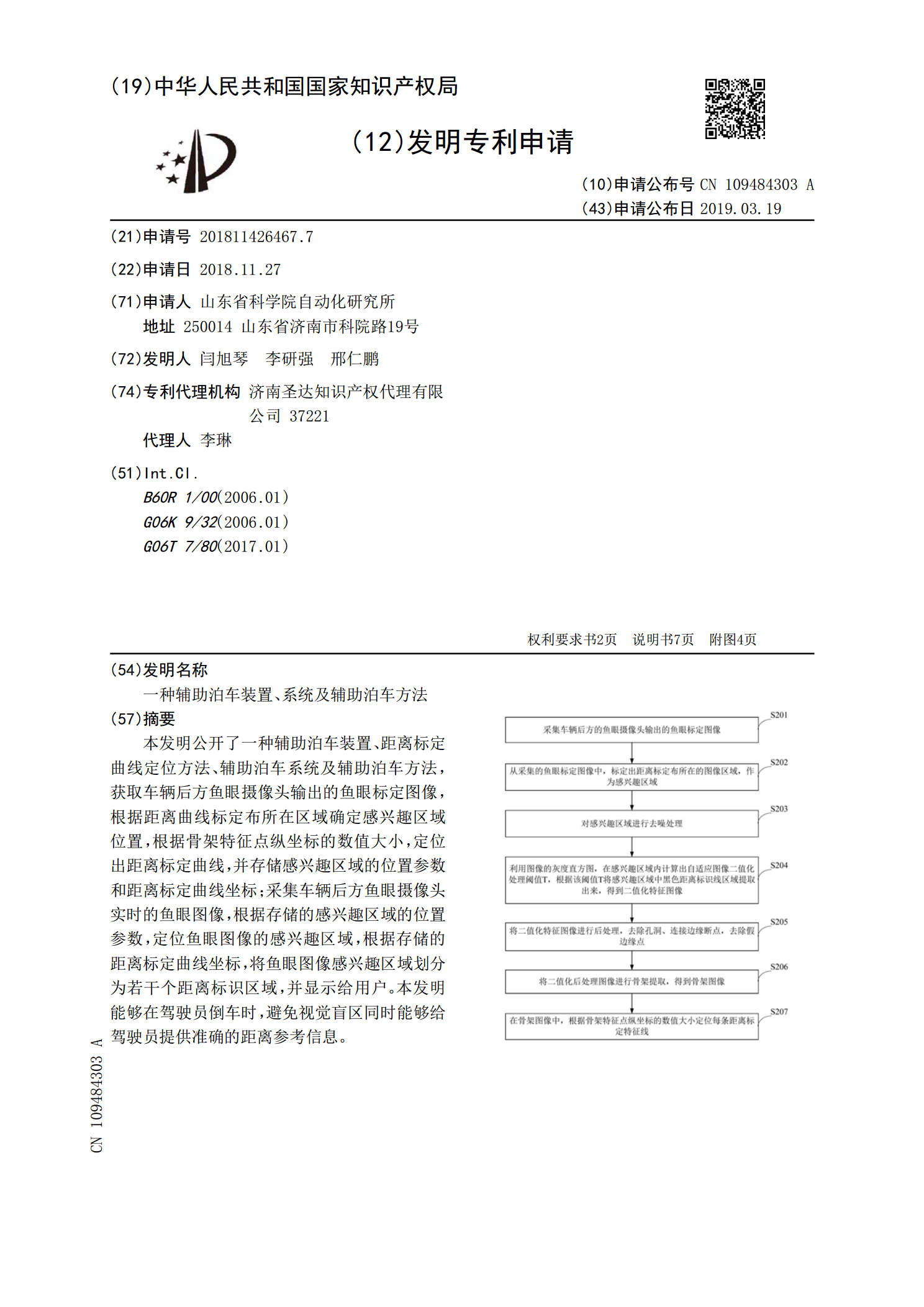
本发明公开了一种辅助泊车装置、距离标定曲线定位方法、辅助泊车系统及辅助泊车方法,获取车辆后方鱼眼摄像头输出的鱼眼标定图像,根据距离曲线标定布所在区域确定感兴趣区域位置,根据骨架特征点纵坐标的数值大小,定位出距离标定曲线,并存储感兴趣区域的位置参数和距离标定曲线坐标;采集车辆后方鱼眼摄像头实时的鱼眼图像,根据存储的感兴趣区域的位置参数,定位鱼眼图像的感兴趣区域,根据存储的距离标定曲线坐标,将鱼眼图像感兴趣区域划分为若干个距离标识区域,并显示给用户。本发明能够在驾驶员倒车时,避免视觉盲区同时能够给驾驶员提供准
泊车辅助方法和泊车辅助装置.pdf
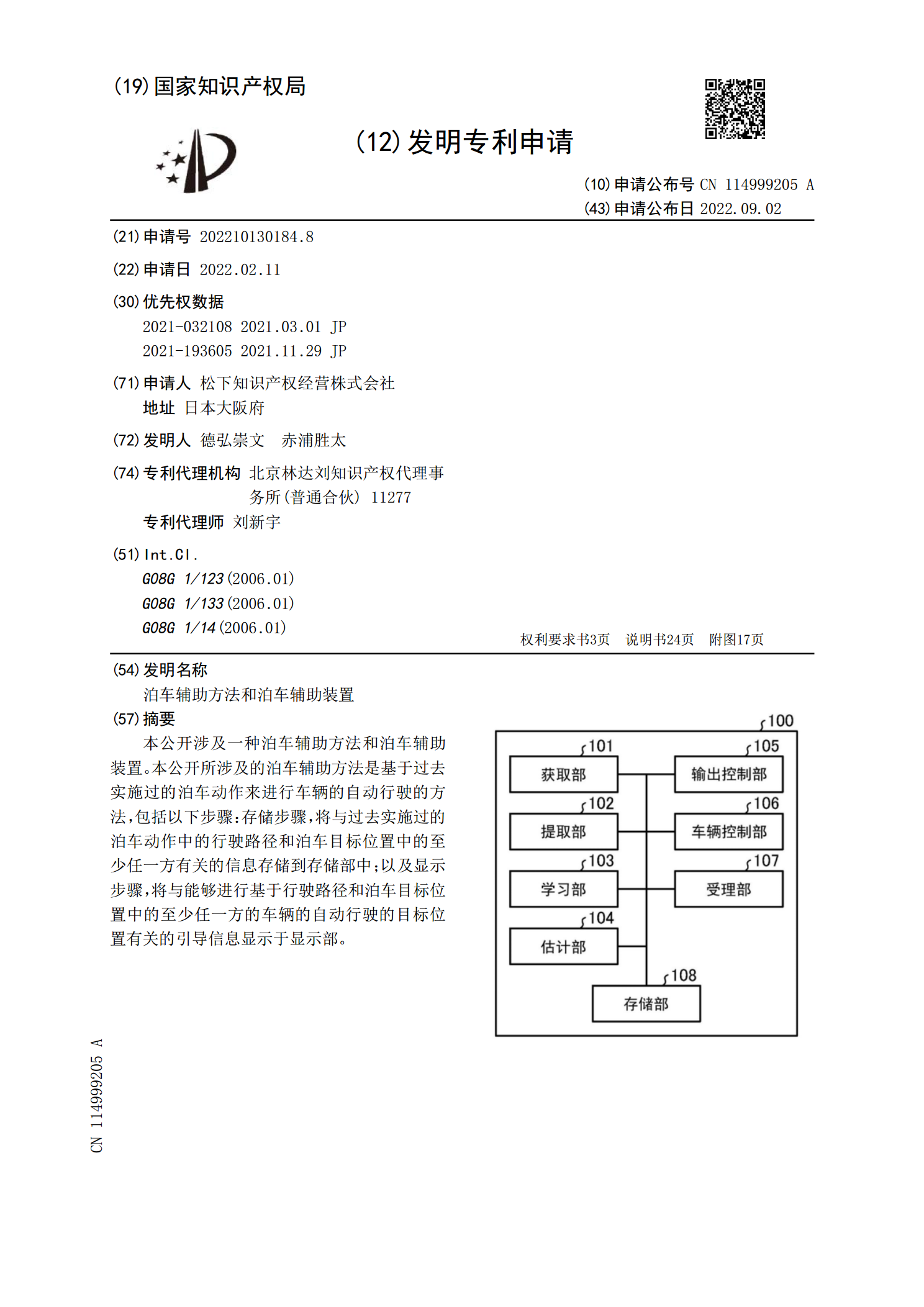
本公开涉及一种泊车辅助方法和泊车辅助装置。本公开所涉及的泊车辅助方法是基于过去实施过的泊车动作来进行车辆的自动行驶的方法,包括以下步骤:存储步骤,将与过去实施过的泊车动作中的行驶路径和泊车目标位置中的至少任一方有关的信息存储到存储部中;以及显示步骤,将与能够进行基于行驶路径和泊车目标位置中的至少任一方的车辆的自动行驶的目标位置有关的引导信息显示于显示部。

泊车辅助系统及泊车方法.pdf
本发明公开了一种泊车辅助系统及泊车方法。其中,系统包括:通讯模块、图像采集模块和图像处理模块;通讯模块,用于接收车辆发送的短消息集,根据短消息集向图像采集模块发送启动信号;接收图像处理模块传输的处理后的图像,将处理后的图像发送至车辆,以供车辆根据处理后的图像进行泊车;图像采集模块,用于根据启动信号进行车辆驶入车库的图像采集,将图像传输至图像处理模块;图像处理模块,用于对图像进行校正和压缩处理,将处理后的图像传输至通讯模块。本发明实现了实时传输图像,使驾驶员根据传输的图像进行泊车,而且无需进行图像拼接,成本
一种车辆泊车辅助方法及其泊车辅助系统.pdf
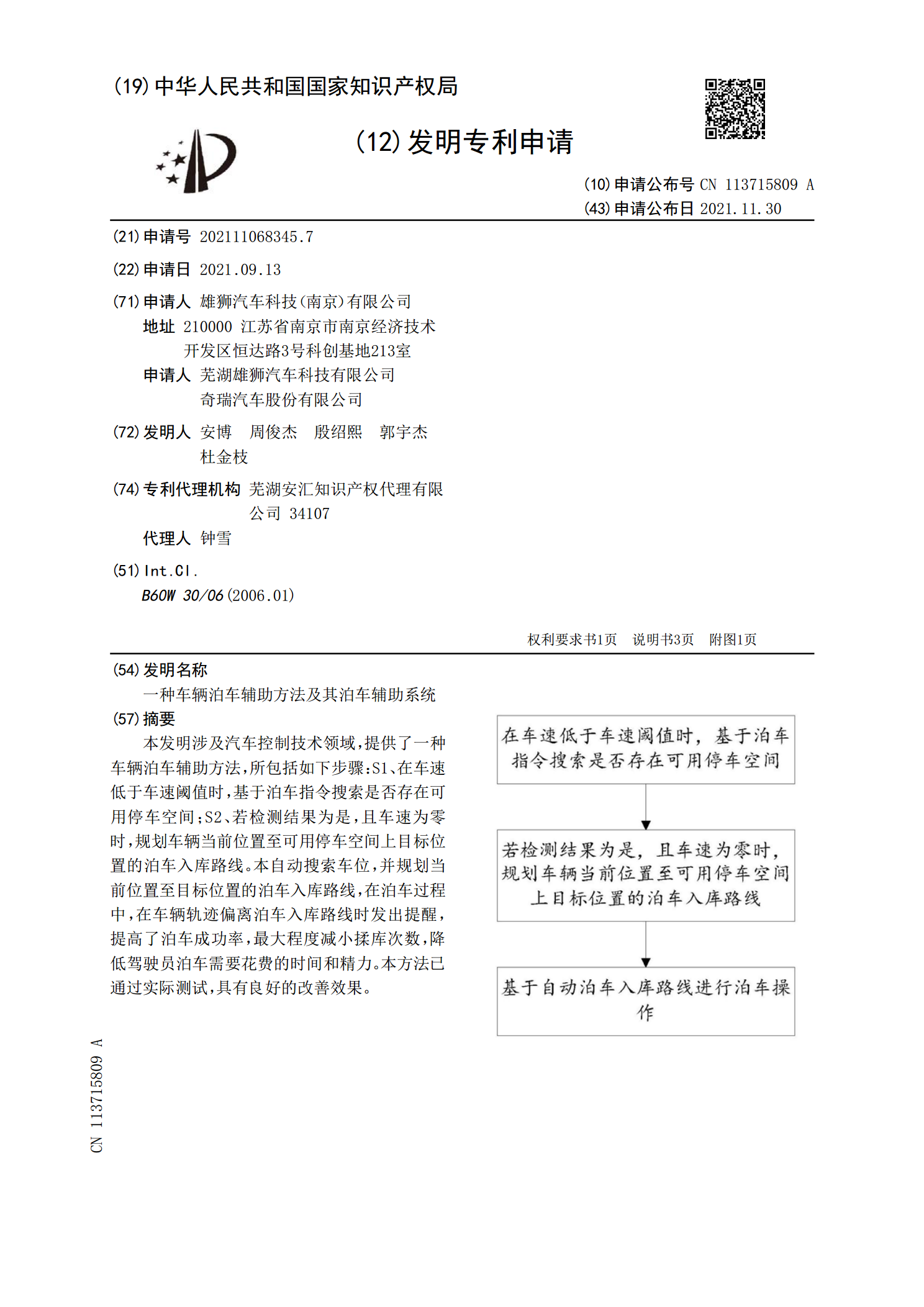
本发明涉及汽车控制技术领域,提供了一种车辆泊车辅助方法,所包括如下步骤:S1、在车速低于车速阈值时,基于泊车指令搜索是否存在可用停车空间;S2、若检测结果为是,且车速为零时,规划车辆当前位置至可用停车空间上目标位置的泊车入库路线。本自动搜索车位,并规划当前位置至目标位置的泊车入库路线,在泊车过程中,在车辆轨迹偏离泊车入库路线时发出提醒,提高了泊车成功率,最大程度减小揉库次数,降低驾驶员泊车需要花费的时间和精力。本方法已通过实际测试,具有良好的改善效果。

汽车辅助轮泊车装置及泊车方法.pdf
本发明公开了一种汽车辅助轮泊车装置,包括设置在汽车辅助轮舱内的辅助轮和辅助轮升降机构,辅助轮升降机构包括液压油缸和辅助轮轮架,辅助轮支撑在辅助轮轮架下端内,位于两个汽车后轮的外侧,辅助轮轴线垂直于汽车后轮轴线,且位于汽车纵向对称平面内;液压油缸后端与液压油缸支座铰接,液压油缸活塞杆前端与辅助轮轮架中部铰接,辅助轮轮架上端与轮架支座铰接。使用汽车辅助轮泊车装置的泊车方法,包括以下步骤:1)汽车斜向驶入泊车空位,2)放下辅助轮,汽车由两个前轮和辅助轮三点支撑;3)辅助轮带动汽车回转进入泊车位置;4)汽车四轮着