
区域自动划分、机器人行走控制方法、系统、设备和介质.pdf

宁馨****找我

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
区域自动划分、机器人行走控制方法、系统、设备和介质.pdf
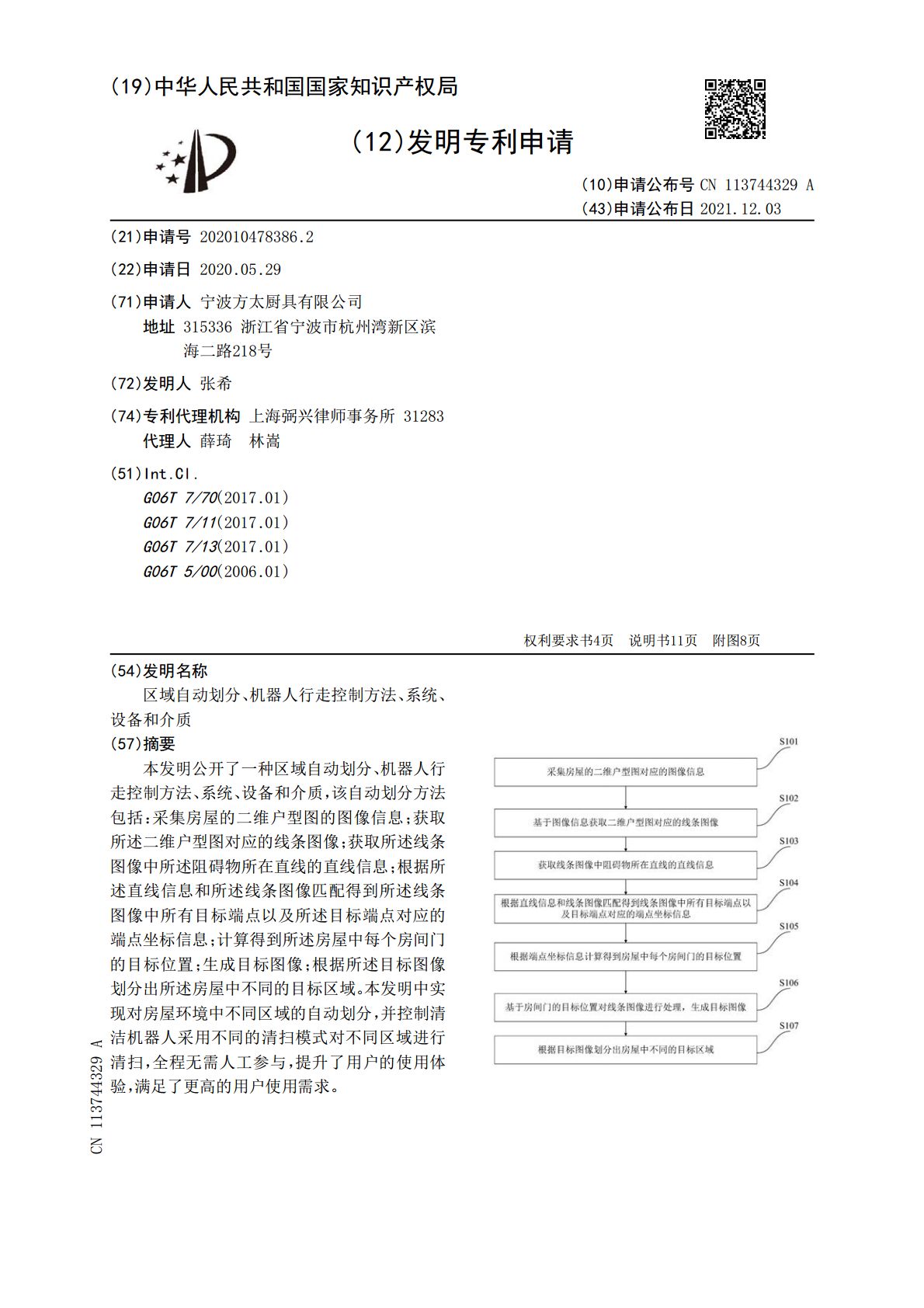
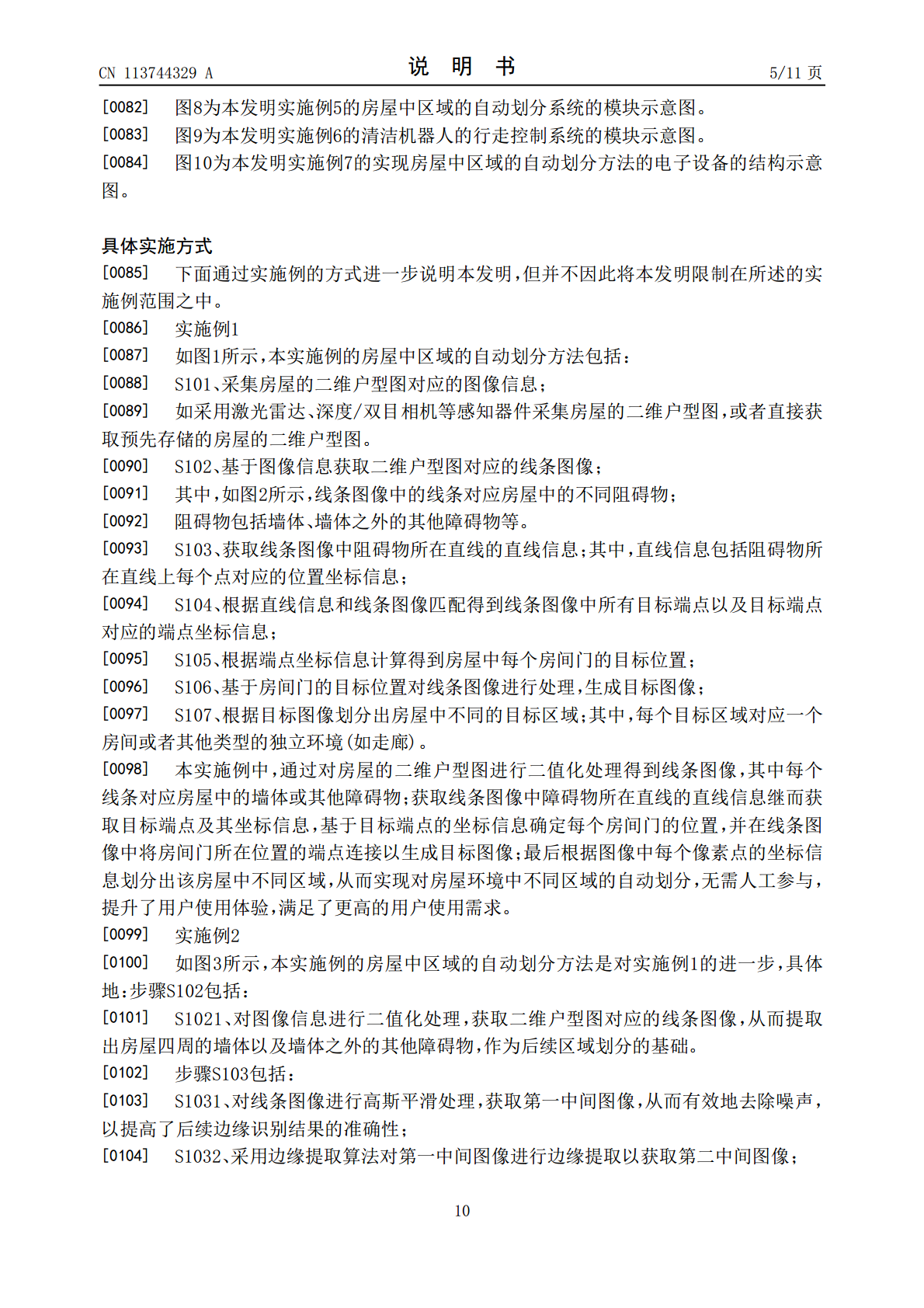
本发明公开了一种区域自动划分、机器人行走控制方法、系统、设备和介质,该自动划分方法包括:采集房屋的二维户型图的图像信息;获取所述二维户型图对应的线条图像;获取所述线条图像中所述阻碍物所在直线的直线信息;根据所述直线信息和所述线条图像匹配得到所述线条图像中所有目标端点以及所述目标端点对应的端点坐标信息;计算得到所述房屋中每个房间门的目标位置;生成目标图像;根据所述目标图像划分出所述房屋中不同的目标区域。本发明中实现对房屋环境中不同区域的自动划分,并控制清洁机器人采用不同的清扫模式对不同区域进行清扫,全程无需
行走控制方法、行走控制设备和计算机可读存储介质.pdf
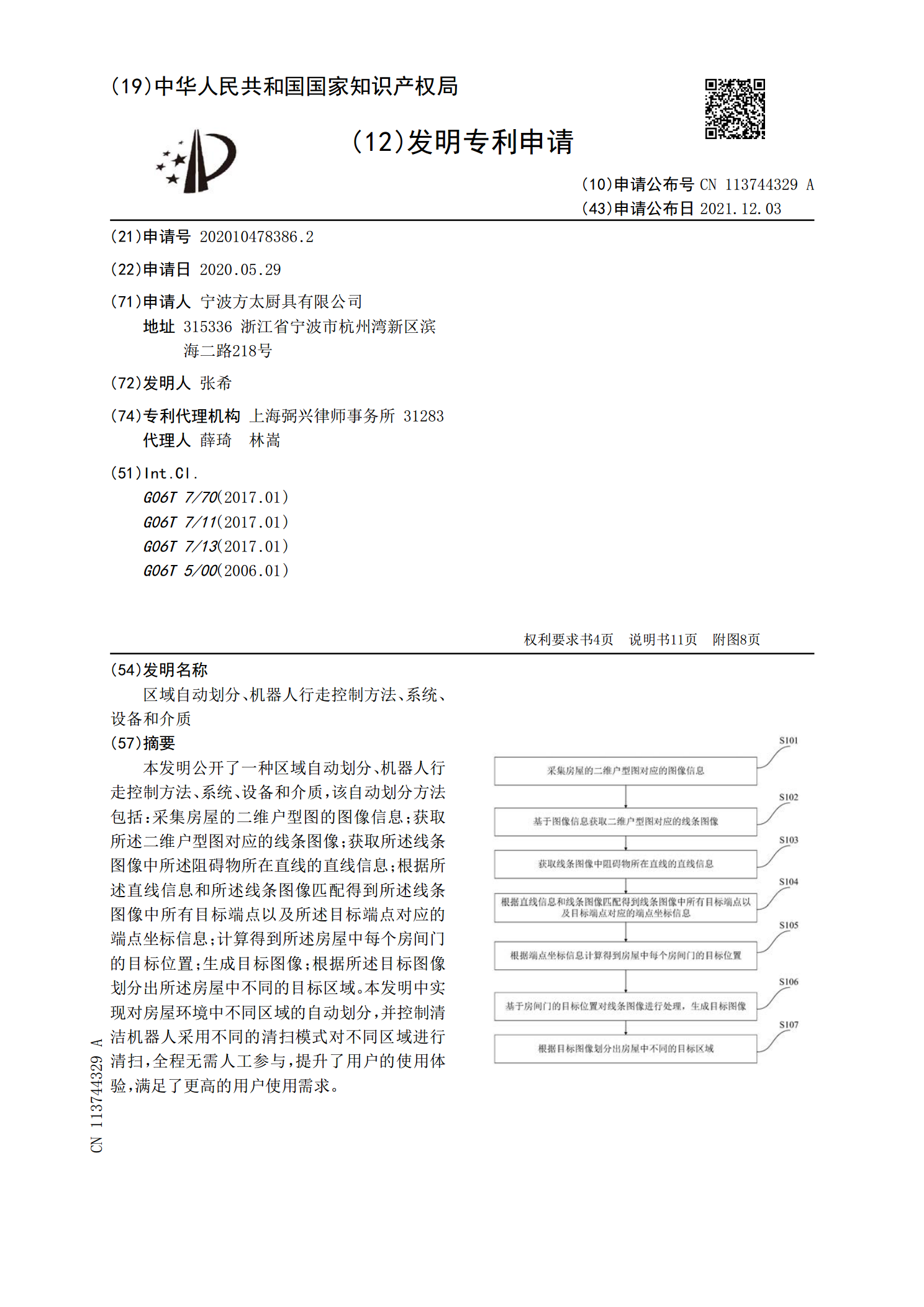
本发明提供了一种行走控制方法、行走控制设备和计算机可读存储介质,其中,行走控制方法包括:在一次前进行程或后退行程过程中,采集轮式自行走设备的行走轨迹;根据行走轨迹确定一次前进行程或后退行程完成后相对预设轨道的行走偏差;根据行走偏差确定补偿速度,以将补偿速度补偿至下一次同向行程中的双侧轮胎中的一侧轮胎中,直至补偿结果满足轮式自行走设备行走在预设轨道上。通过本发明的技术方案,实现了针对大结构、大重量的轮胎吊等设备存在的滞后性进行滞后补偿,以保证满足轮式自行走设备行走在预设轨道上。
自动行走机器人床及控制方法.pdf
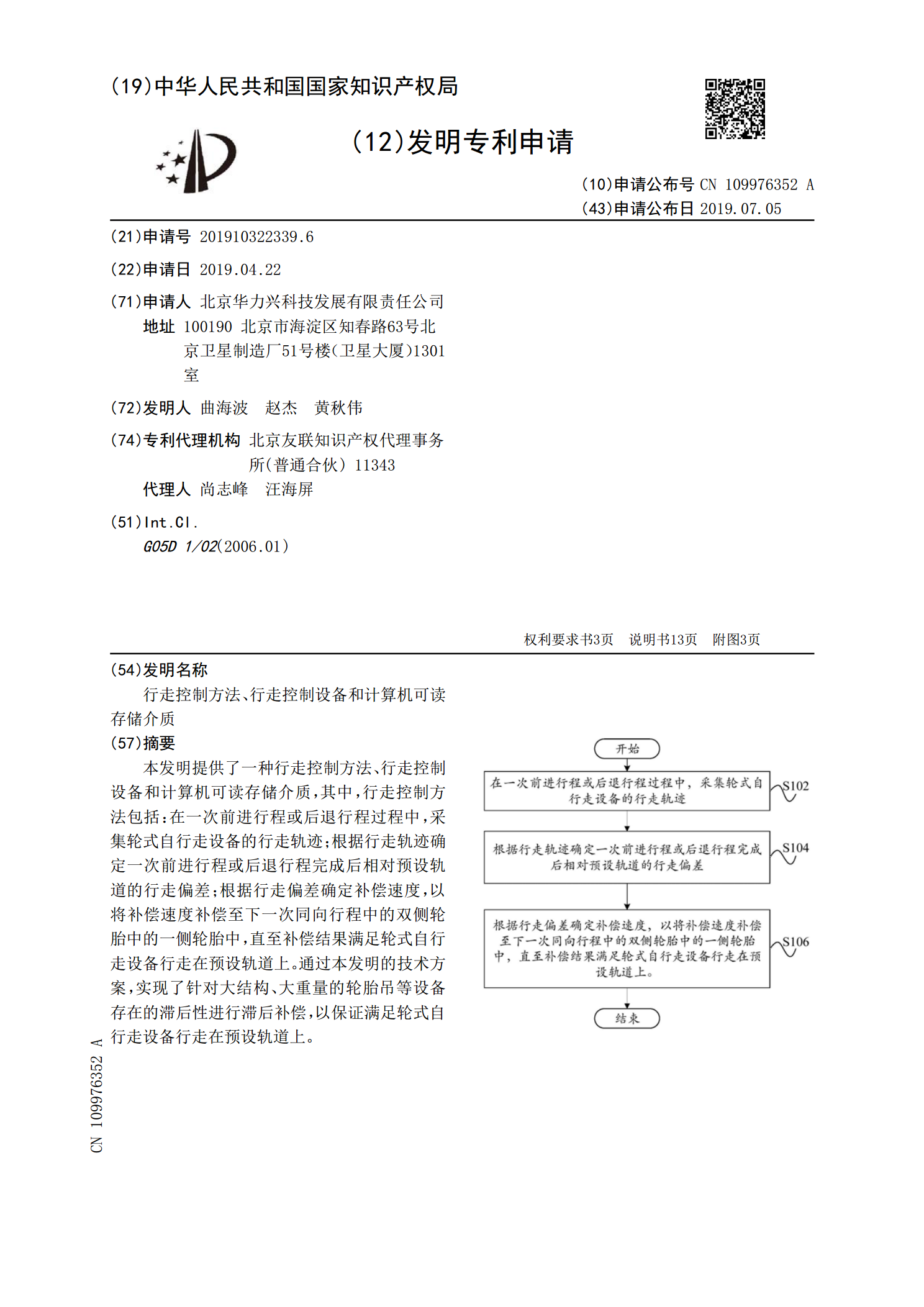
本发明涉及一种自动行走机器人床及控制方法。目前瘫痪在床的病人想要对手脚进行适当的运动需要靠人来帮忙,十分麻烦。本发明组成包括:机架(1),机架与副机架(48)通过合页(47)连接,机架与副机架的下端都安装有底轮(45),机架的前后两端分别安装有固定板(9),两个固定板分别与转轴A(13)、转轴B(16)、转轴C(21)的端部通过轴承固定连接,转轴A上安装有链轮A(24),转轴B上分别安装有链轮B(41)、链轮C(42)、链轮D(43),转轴C上安装有链轮E(44),转轴A上安装有滚筒A(12),转轴B上分

机器人控制方法、系统、终端设备和存储介质.pdf
本发明公开了一种机器人控制方法、系统、终端设备和存储介质,其方法包括:在机器人行驶过程中获取机器人的状态信息和周围的环境信息,并获取所述机器人的当前位置;根据所述环境信息和状态信息,确定所述机器人具有停止行驶需求时,控制所述机器人在所述当前位置停留,并识别所述机器人的停驻类型;根据所述停驻类型采用对应的提示机制进行报警,以提示对应人员解除所述机器人的停驻状态。本发明根据机器人当前的环境信息和状态信息进行有效的停驻控制和报警,以使得机器人安全、及时、高效移动以完成待执行任务。
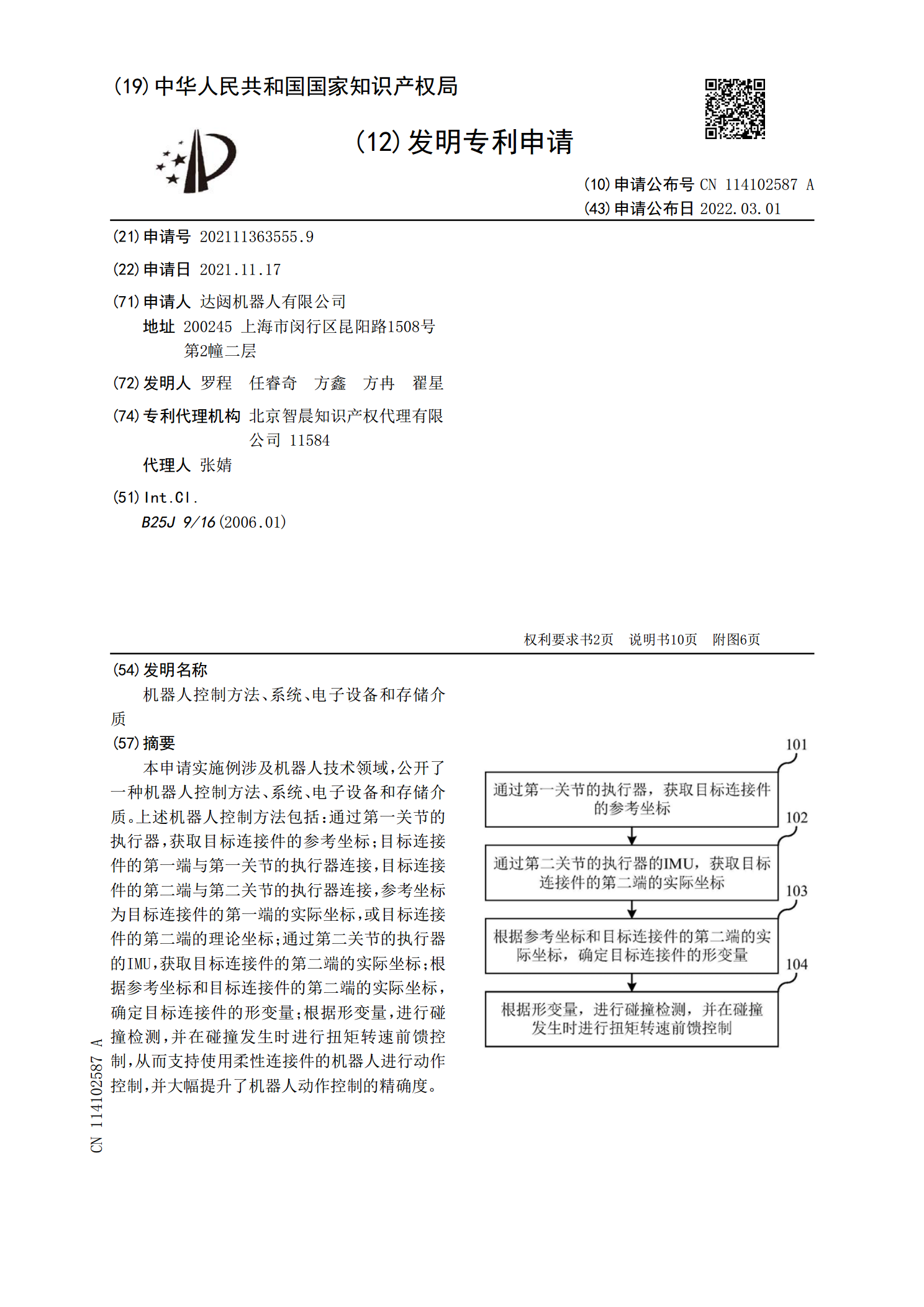
机器人控制方法、系统、电子设备和存储介质.pdf
本申请实施例涉及机器人技术领域,公开了一种机器人控制方法、系统、电子设备和存储介质。上述机器人控制方法包括:通过第一关节的执行器,获取目标连接件的参考坐标;目标连接件的第一端与第一关节的执行器连接,目标连接件的第二端与第二关节的执行器连接,参考坐标为目标连接件的第一端的实际坐标,或目标连接件的第二端的理论坐标;通过第二关节的执行器的IMU,获取目标连接件的第二端的实际坐标;根据参考坐标和目标连接件的第二端的实际坐标,确定目标连接件的形变量;根据形变量,进行碰撞检测,并在碰撞发生时进行扭矩转速前馈控制,从而