
机器人控制方法、系统、电子设备和存储介质.pdf

斌斌****公主

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人控制方法、系统、电子设备和存储介质.pdf
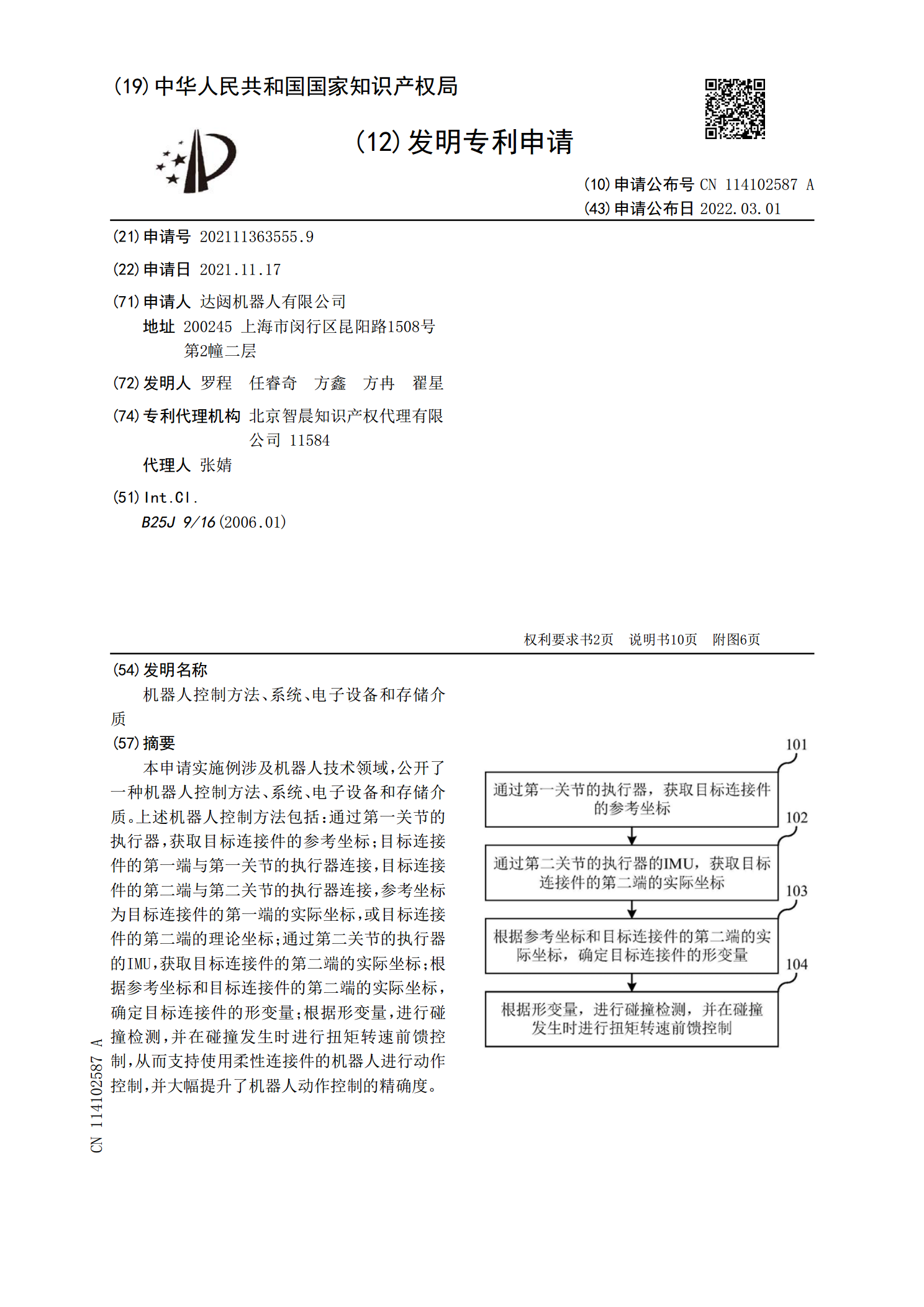
本申请实施例涉及机器人技术领域,公开了一种机器人控制方法、系统、电子设备和存储介质。上述机器人控制方法包括:通过第一关节的执行器,获取目标连接件的参考坐标;目标连接件的第一端与第一关节的执行器连接,目标连接件的第二端与第二关节的执行器连接,参考坐标为目标连接件的第一端的实际坐标,或目标连接件的第二端的理论坐标;通过第二关节的执行器的IMU,获取目标连接件的第二端的实际坐标;根据参考坐标和目标连接件的第二端的实际坐标,确定目标连接件的形变量;根据形变量,进行碰撞检测,并在碰撞发生时进行扭矩转速前馈控制,从而

门禁控制方法、系统、电子设备和存储介质.pdf
本公开提供了一种门禁控制方法,可以应用于门禁控制技术领域或金融科技领域。该门禁控制方法包括:响应于门禁通行请求,采集目标人体的步态影像,得到步态影像数据序列;将步态影像数据序列输入至卷积神经网络模型中,输出目标人体的步态特征,其中,在卷积神经网络模型中设置偏离值校正目标人体的步态特征;在目标人体的步态特征与标准人体步态特征相匹配的情况下,利用深度学习算法追踪目标人体的位置信息;当感应到目标人体的位置信息靠近门禁时,且门禁在空闲状态下,发出允许目标人体通行的控制信号。本公开还提供了一种门禁控制系统、电子设备
机器人调度方法、装置、系统、电子设备和存储介质.pdf
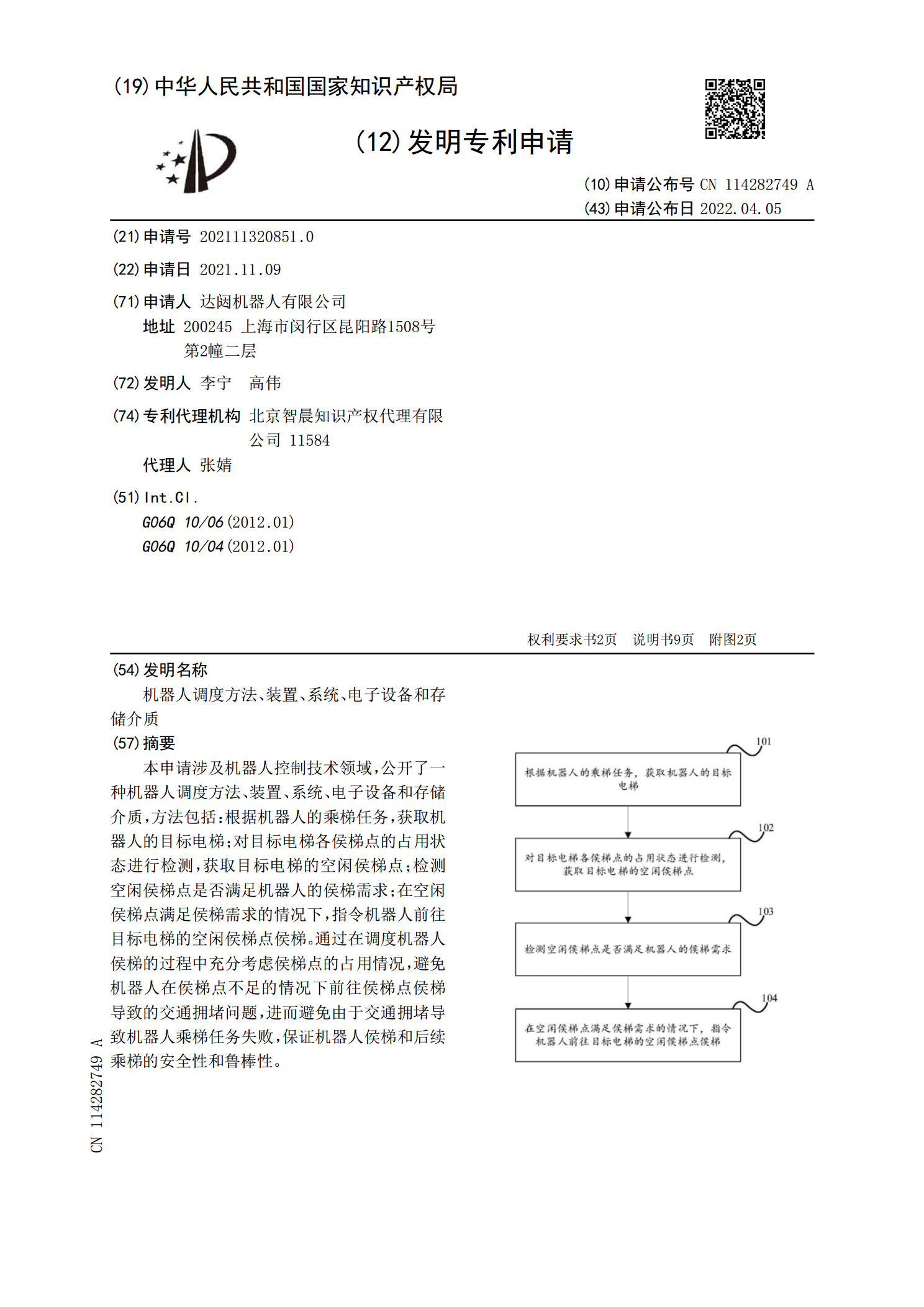
本申请涉及机器人控制技术领域,公开了一种机器人调度方法、装置、系统、电子设备和存储介质,方法包括:根据机器人的乘梯任务,获取机器人的目标电梯;对目标电梯各侯梯点的占用状态进行检测,获取目标电梯的空闲侯梯点;检测空闲侯梯点是否满足机器人的侯梯需求;在空闲侯梯点满足侯梯需求的情况下,指令机器人前往目标电梯的空闲侯梯点侯梯。通过在调度机器人侯梯的过程中充分考虑侯梯点的占用情况,避免机器人在侯梯点不足的情况下前往侯梯点侯梯导致的交通拥堵问题,进而避免由于交通拥堵导致机器人乘梯任务失败,保证机器人侯梯和后续乘梯的安
空调的控制方法、控制系统、电子设备和存储介质.pdf
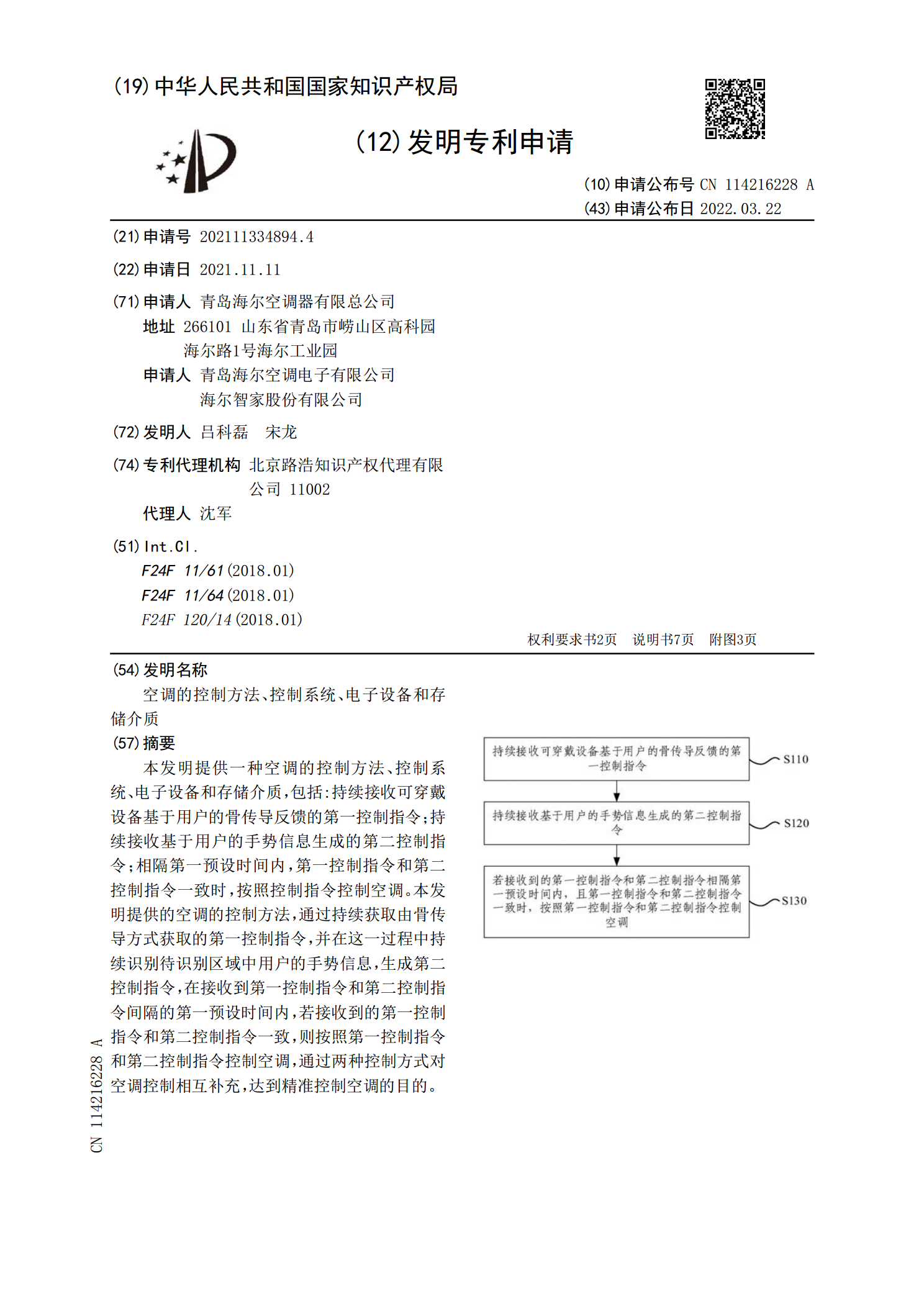
本发明提供一种空调的控制方法、控制系统、电子设备和存储介质,包括:持续接收可穿戴设备基于用户的骨传导反馈的第一控制指令;持续接收基于用户的手势信息生成的第二控制指令;相隔第一预设时间内,第一控制指令和第二控制指令一致时,按照控制指令控制空调。本发明提供的空调的控制方法,通过持续获取由骨传导方式获取的第一控制指令,并在这一过程中持续识别待识别区域中用户的手势信息,生成第二控制指令,在接收到第一控制指令和第二控制指令间隔的第一预设时间内,若接收到的第一控制指令和第二控制指令一致,则按照第一控制指令和第二控制指

设备控制方法、系统、装置、电子设备和存储介质.pdf
本申请涉及一种设备控制方法、系统、装置、电子设备和存储介质,应用于设备控制技术领域,其中,方法包括:获取控制端发送的对被控端的控制指令;在确定控制端已订阅被控端的目标主题信息后,根据目标主题信息向被控端发送控制指令,以使被控端获取控制指令后,执行控制指令对应的操作。以解决现有技术中,不同家庭设备间错误控制,造成智能家居设备的指令混乱的问题。