
自动行走机器人床及控制方法.pdf

春景****23

1/8
2/8
3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动行走机器人床及控制方法.pdf
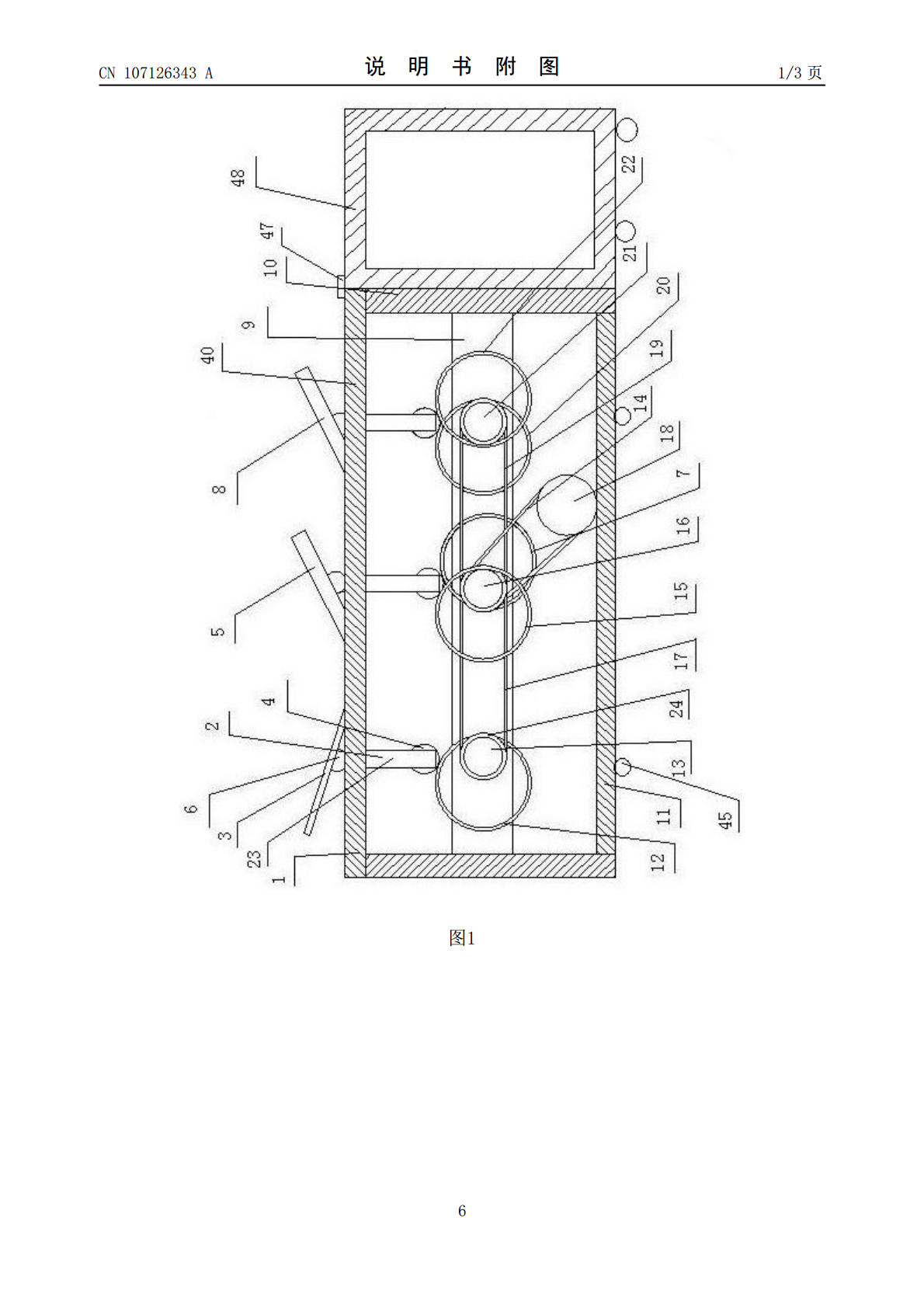
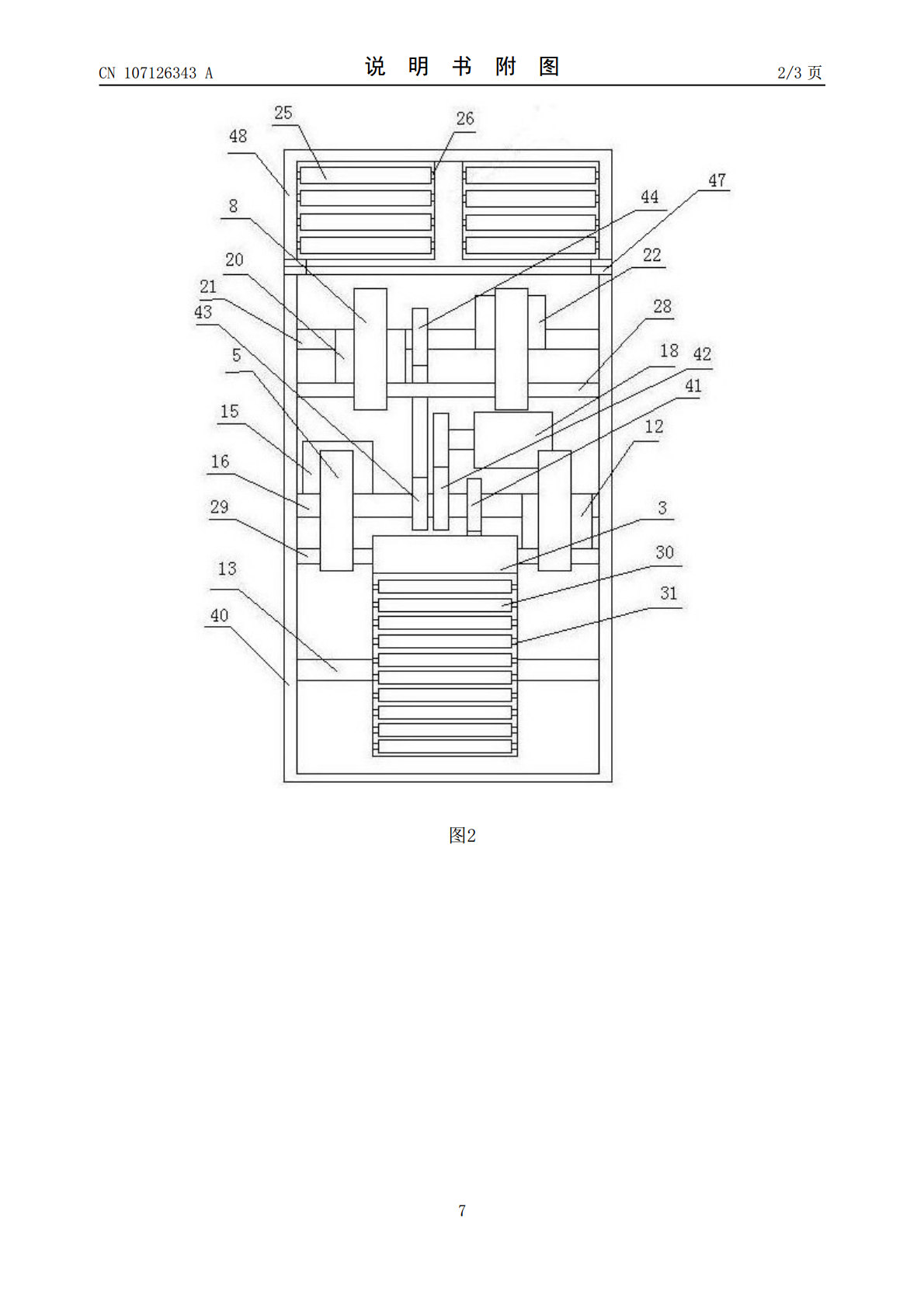
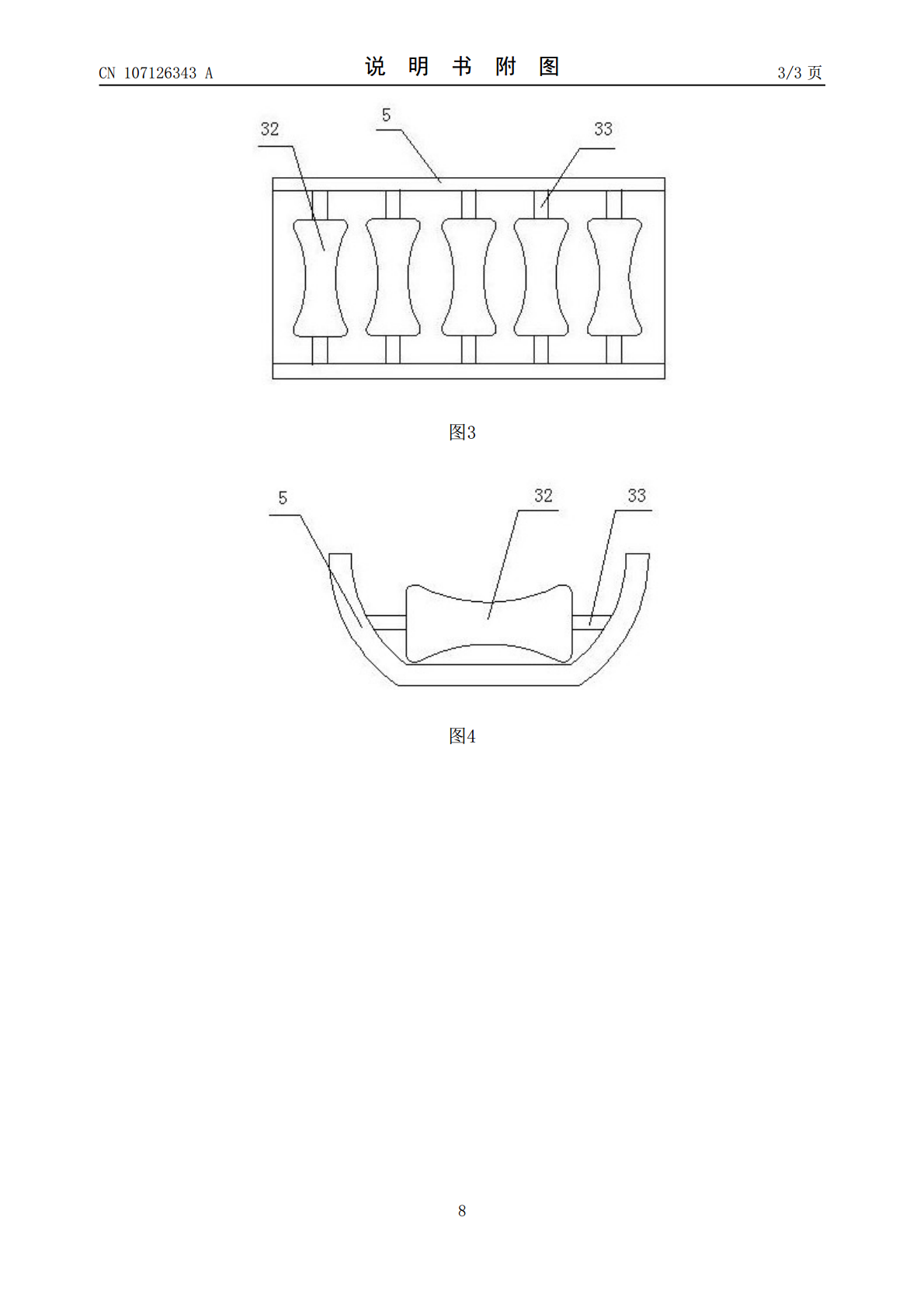
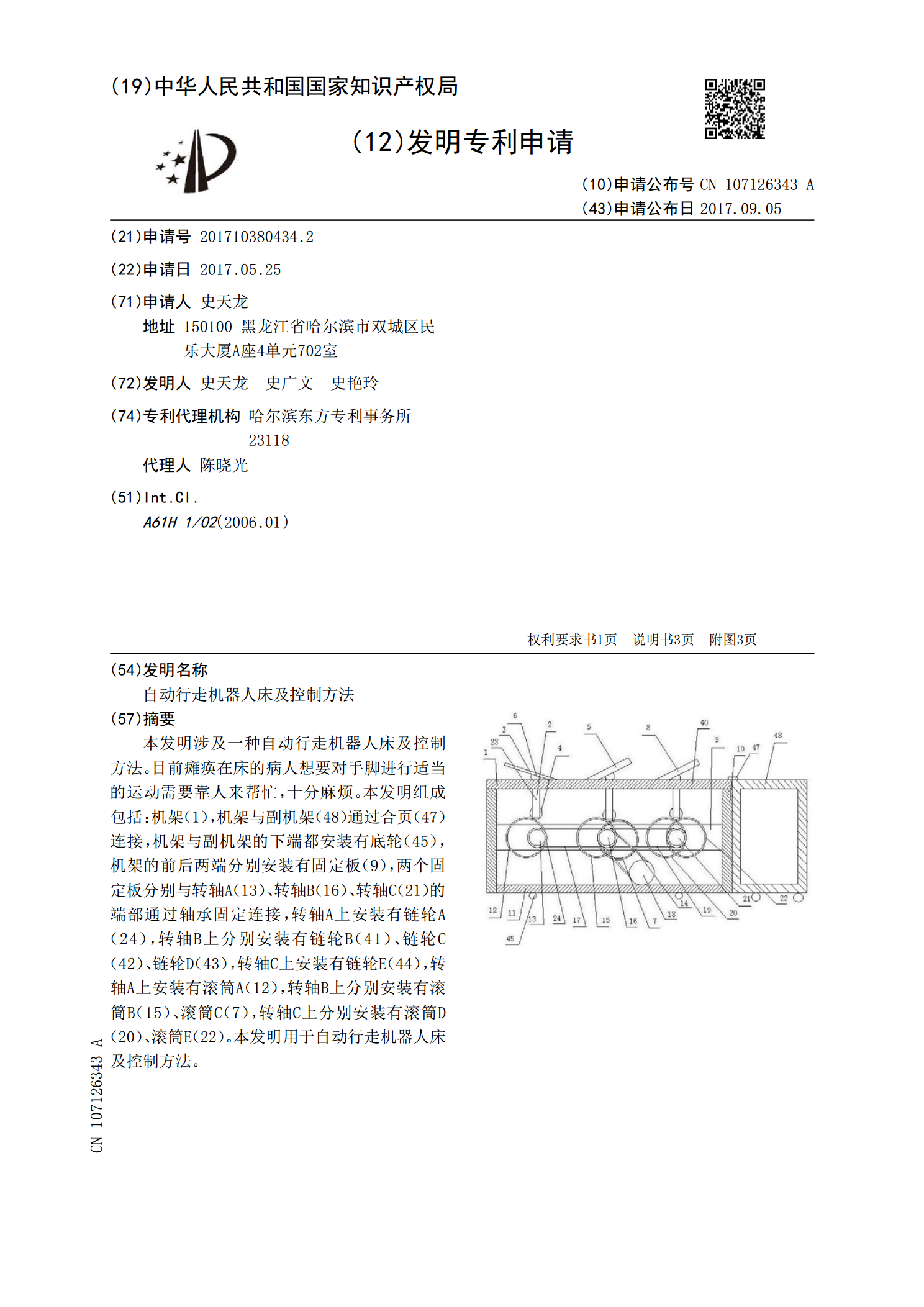
本发明涉及一种自动行走机器人床及控制方法。目前瘫痪在床的病人想要对手脚进行适当的运动需要靠人来帮忙,十分麻烦。本发明组成包括:机架(1),机架与副机架(48)通过合页(47)连接,机架与副机架的下端都安装有底轮(45),机架的前后两端分别安装有固定板(9),两个固定板分别与转轴A(13)、转轴B(16)、转轴C(21)的端部通过轴承固定连接,转轴A上安装有链轮A(24),转轴B上分别安装有链轮B(41)、链轮C(42)、链轮D(43),转轴C上安装有链轮E(44),转轴A上安装有滚筒A(12),转轴B上分

钢结构自动行走挂载机器人及其行走方法.pdf
本发明公开了一种钢结构自动行走挂载机器人及其行走方法,包括:主体部;挂载部,安装于导向槽轮主体部上,导向槽轮挂载部适于搭载作业设备;行走部,包括沿前后方向排列的前行走脚和后行走脚,导向槽轮前行走脚和导向槽轮后行走脚择一安装于导向槽轮主体部上,另一与导向槽轮主体部沿前后方向滑动连接,导向槽轮前行走脚和导向槽轮后行走脚均包括电磁铁,导向槽轮电磁铁适于在通电时吸附于钢结构的表面并在断电时脱离导向槽轮钢结构的表面。本机器人巧妙地应用钢结构自身的导磁性,电磁铁能够在通电时吸附于钢结构的表面,能实现本机器人的自动行走
机器人脚轮、行走机器人及行走机器人的控制方法.pdf
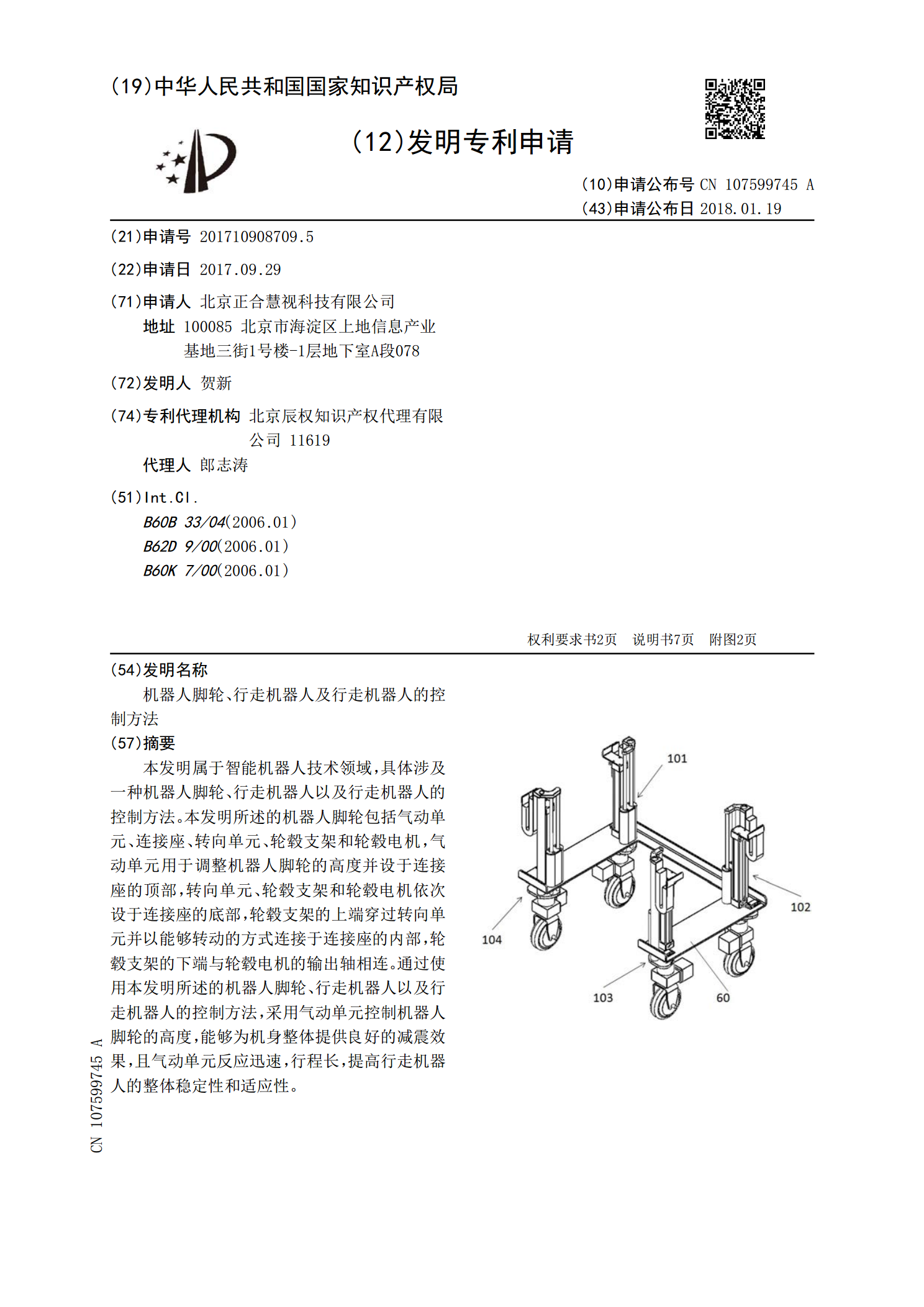
本发明属于智能机器人技术领域,具体涉及一种机器人脚轮、行走机器人以及行走机器人的控制方法。本发明所述的机器人脚轮包括气动单元、连接座、转向单元、轮毂支架和轮毂电机,气动单元用于调整机器人脚轮的高度并设于连接座的顶部,转向单元、轮毂支架和轮毂电机依次设于连接座的底部,轮毂支架的上端穿过转向单元并以能够转动的方式连接于连接座的内部,轮毂支架的下端与轮毂电机的输出轴相连。通过使用本发明所述的机器人脚轮、行走机器人以及行走机器人的控制方法,采用气动单元控制机器人脚轮的高度,能够为机身整体提供良好的减震效果,且气动
区域自动划分、机器人行走控制方法、系统、设备和介质.pdf
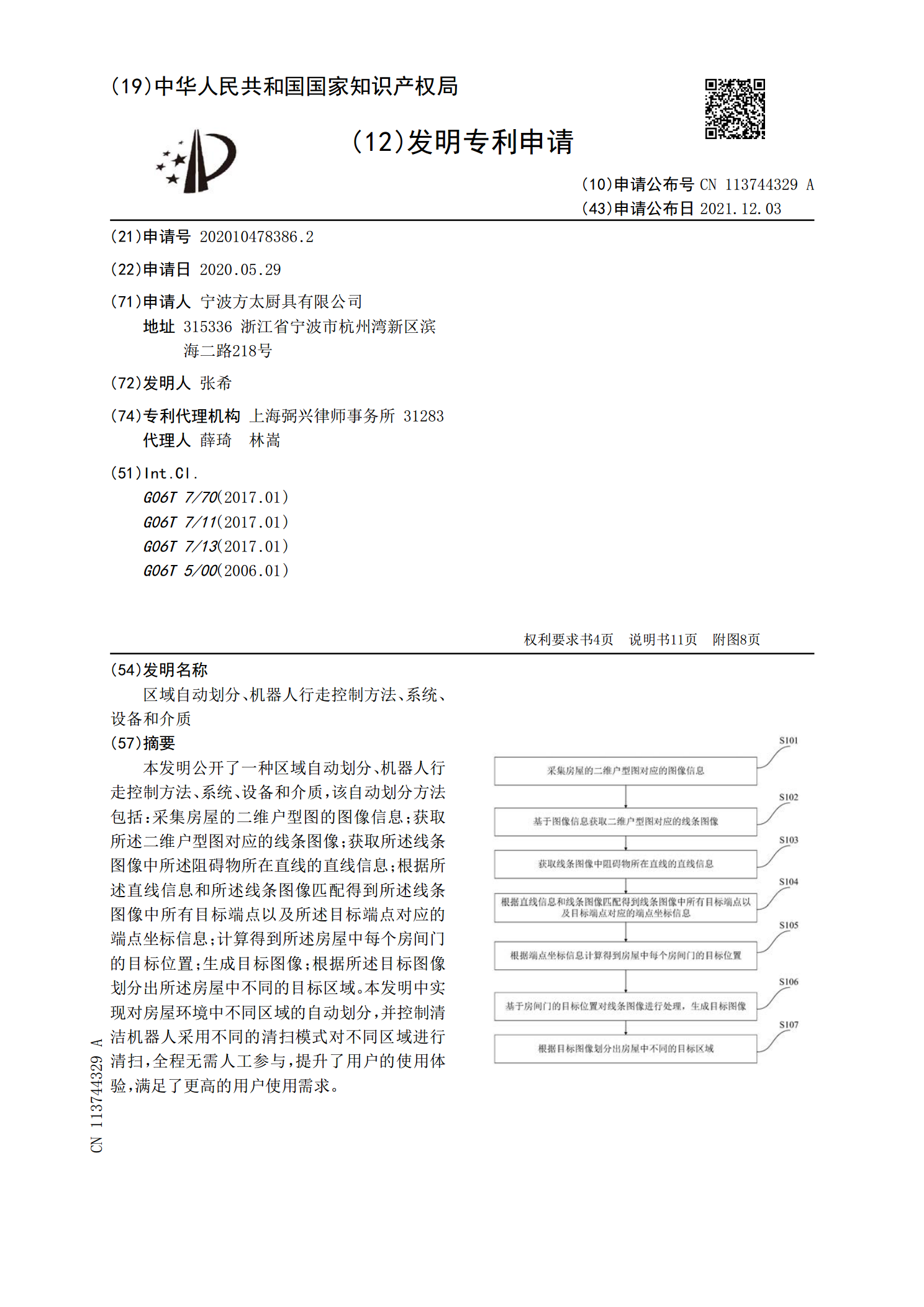
本发明公开了一种区域自动划分、机器人行走控制方法、系统、设备和介质,该自动划分方法包括:采集房屋的二维户型图的图像信息;获取所述二维户型图对应的线条图像;获取所述线条图像中所述阻碍物所在直线的直线信息;根据所述直线信息和所述线条图像匹配得到所述线条图像中所有目标端点以及所述目标端点对应的端点坐标信息;计算得到所述房屋中每个房间门的目标位置;生成目标图像;根据所述目标图像划分出所述房屋中不同的目标区域。本发明中实现对房屋环境中不同区域的自动划分,并控制清洁机器人采用不同的清扫模式对不同区域进行清扫,全程无需

自动行走机器人.pdf
本发明揭示了一种自动行走机器人,用于在地面上自动行走和工作,包括:机体,安装于机体的行走模块以及与行走模块连接的控制模块,行走模块包括安装在机体上的行走轮组和驱动行走轮组的行走马达,沿着自动行走机器人的行进方向,行走轮组包括设置在前的两个前轮以及相对的两个后轮,每个行走轮具有与该行走轮相对固定的轮轴,位于同一侧的前轮和后轮设置为同步转动,在两个行走轮之间接触地面的高度不同时,至少一个行走轮和其轮轴相对于机体的位置发生改变,以使机体保持在趋近于水平位置的平衡状态。本发明的自动行走机器人,其行走轮可以根据地面