
一种基于人工势场法的AGV动态避障方法.pdf

St****12

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于人工势场法的AGV动态避障方法.pdf
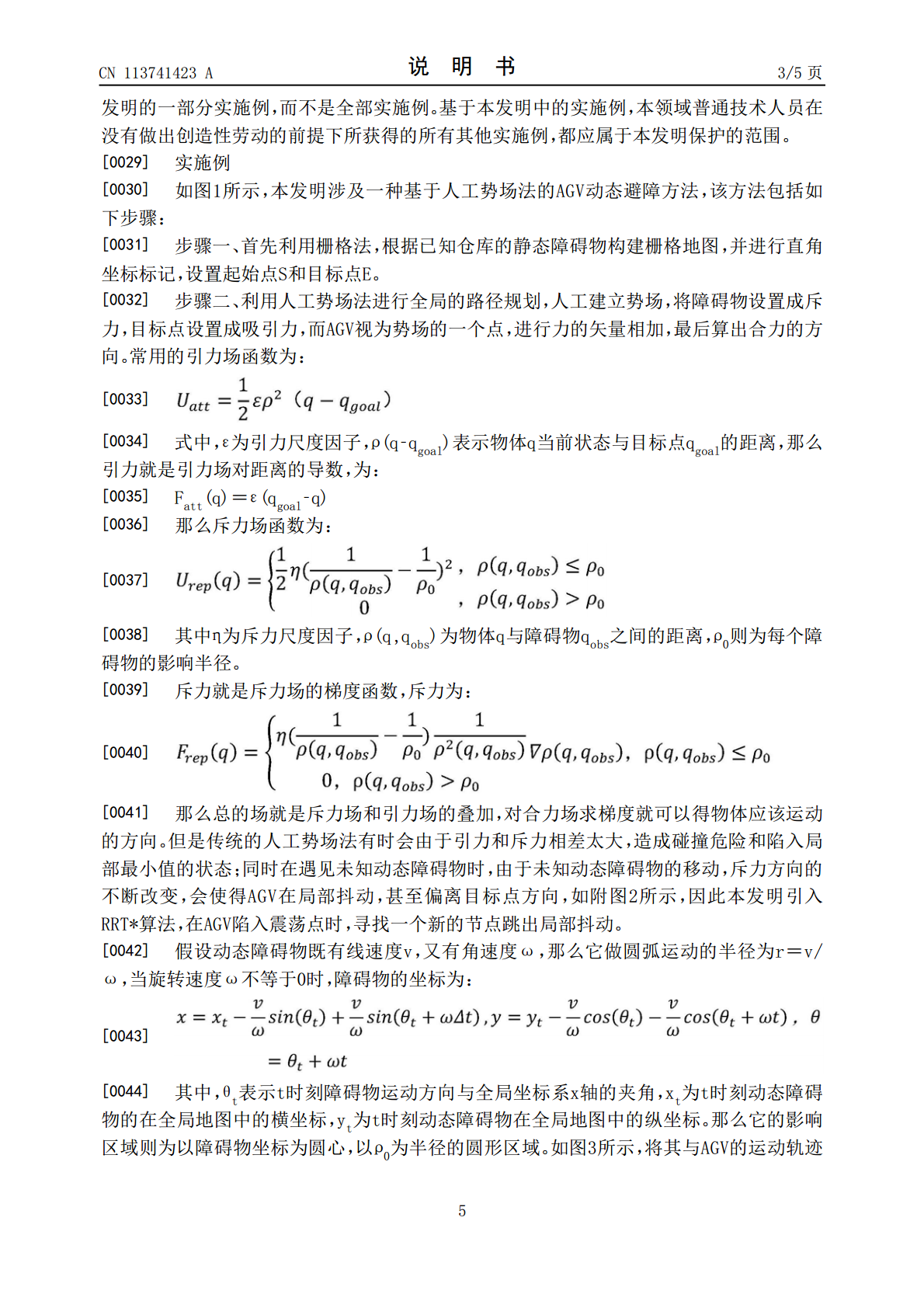
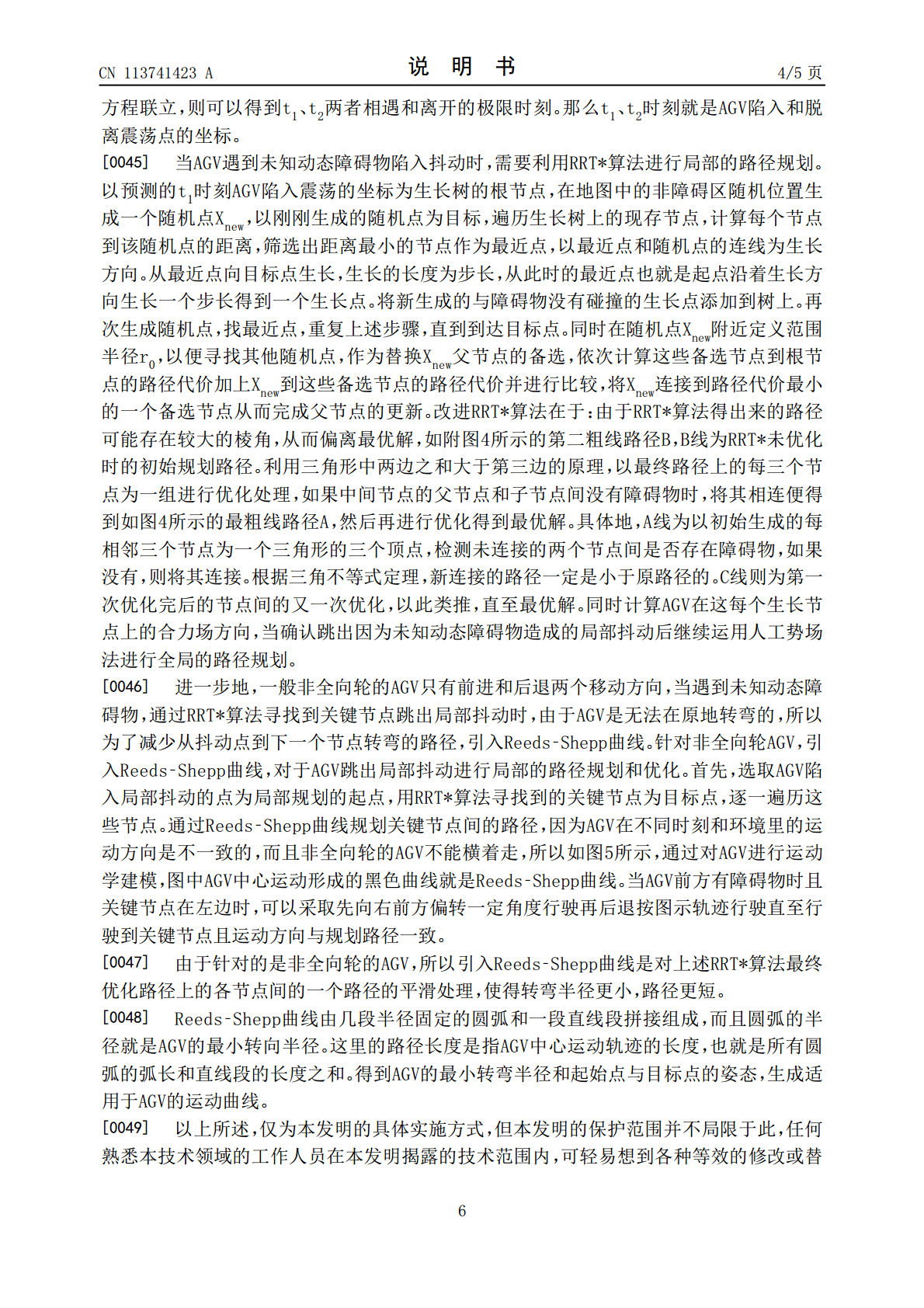
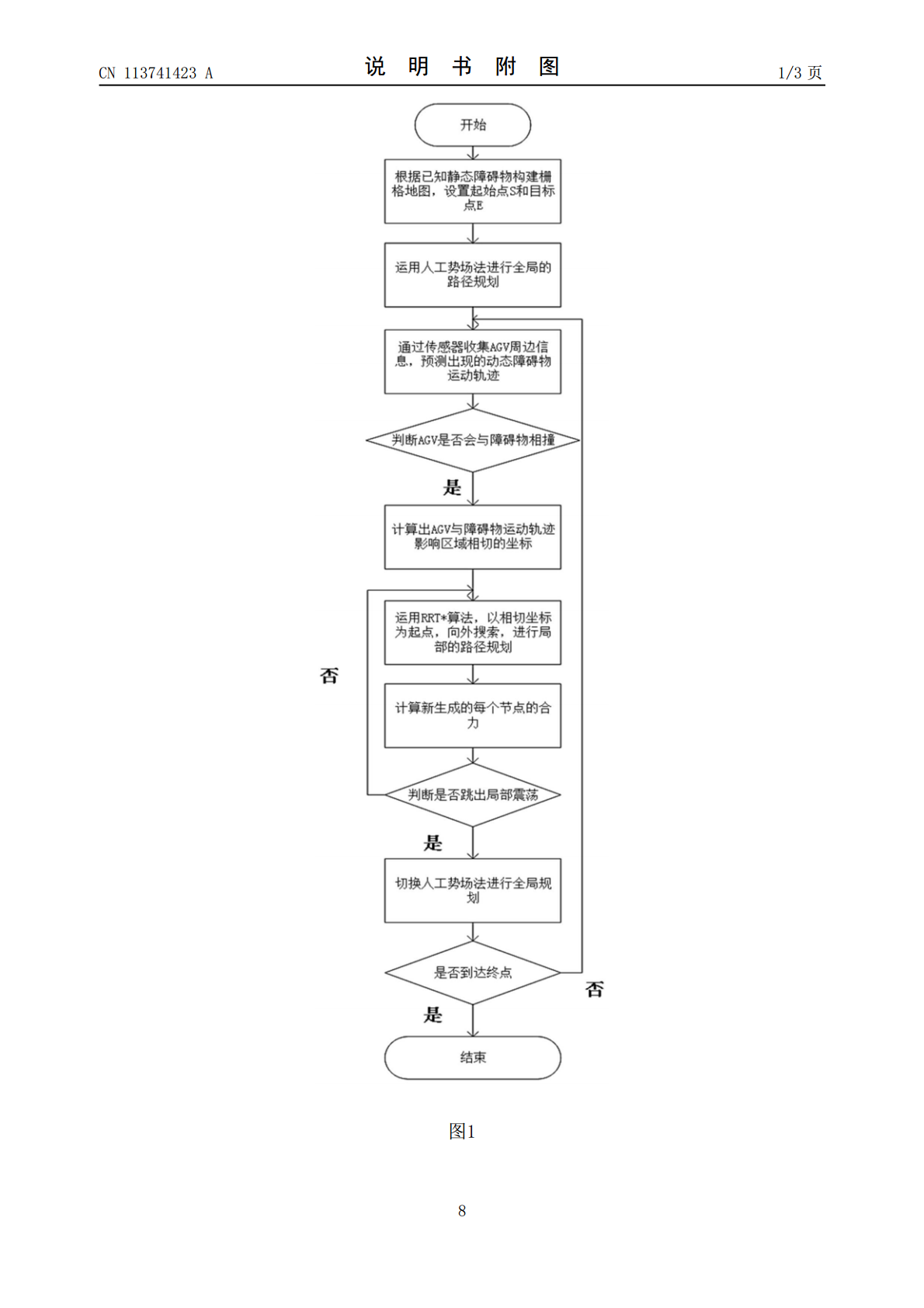
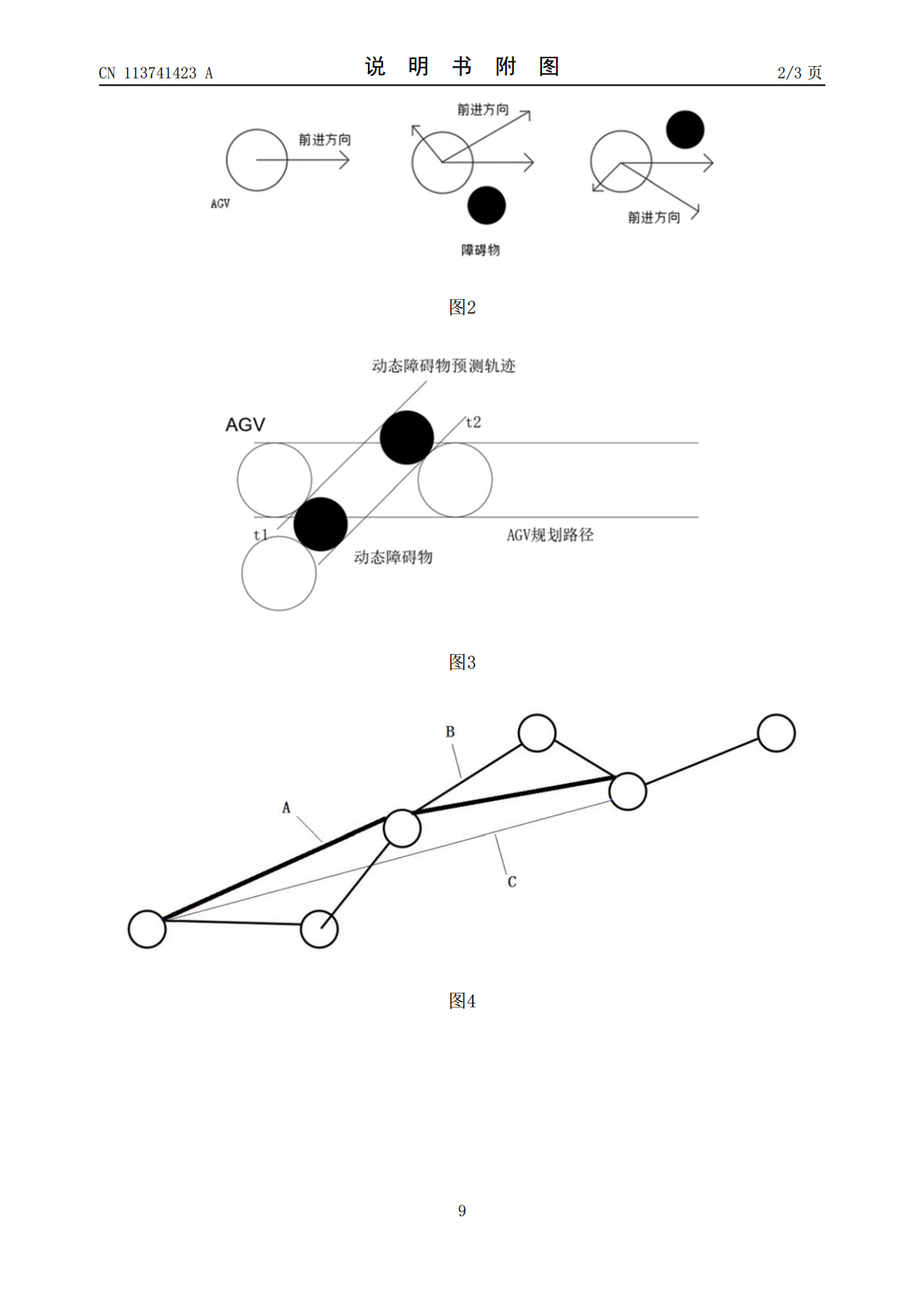
本发明涉及一种基于人工势场法的AGV动态避障方法,包括步骤:1)根据已知仓库的静态障碍物构建栅格地图,并进行直角坐标标记,设置起始点和目标点;2)进行全局的路径规划,建立势场,将障碍物设置为斥力,将目标点设置为吸引力,将AGV视为势场的一个点,进行力的矢量相加,计算合力的方向;3)当判断AGV遇到未知动态障碍物陷入抖动时,利用RRT*算法进行局部的路径规划,并寻找新的节点使AGV跳出局部抖动;4)确认AGV跳出因未知动态障碍物造成的局部抖动后,继续进行全局的路径规划。与现有技术相比,本发明具有减小AGV逃

一种基于人工势场法的车辆编队避障控制方法.pdf
一种基于人工势场法的车辆编队避障控制方法,首先建立本车的运动学模型,根据道路环境和车辆跟驰情况构建道路势场和车辆避撞势场;然后将道路抽象为轨迹,对该轨迹进行跟踪,利用反步法设计车辆跟踪控制器;并设计势能控制器规范车辆行进、避免车辆相撞与撞到障碍,该控制器为切换控制器,在人工势场仅在触发条件满足的情况下发挥作用。本发明能够保证车辆队列快速高效、顺利通过障碍物,完成避障后较快恢复编队行驶。
一种基于机器学习的AGV动态避障方法.pdf
本发明属于机器人相关技术领域,其公开了一种基于机器学习的AGV动态避障方法,包括以下步骤:(1)对二维激光雷达点云数据进行动态障碍物划定,标记出动态障碍物的覆盖范围;(2)计算获得动态障碍物的速度向量;(3)计算获得动态障碍物的趋势向量;(4)构建AGV运动引导矩阵和运动引导张量;(5)使用AGV运动引导张量作为深度强化学习的神经网络输入以构建神经网络;(6)对深度强化学习训练引入基于动态障碍物运动状态的多阶动态惩罚机制(7)对深度强化学习训练引入AGV前进奖励机制;(8)进行深度强化学习避障训练,进而控

一种基于人工势场的无人车弯道避障路径规划方法.pdf
本发明涉及一种基于人工势场的无人车弯道避障路径规划方法,属于无人车驾驶技术领域。现有的人工势场法在规划无人车避障路径时,存在局部最优问题,本发明在构建人工合力势场的基础上,根据合力判断主车是否陷入局部最优,通过绕圆避障1的方式解决局部最优问题,通过绕圆避障2的方式解决规划出的下一轨迹点位于障碍物膨胀范围内的问题,并且在绕圆避障过程中,根据合力对主车速度进行调整,从而保障车辆安全。
一种基于人工势场法的车辆主动避撞方法.pdf
本发明提供一种基于人工势场法的车辆主动避撞方法,包括以下步骤,获取车辆自身与环境信息;通过分析车辆自身与环境信息,建立车辆斥力人工势场模型,得到车辆当前所受虚拟斥力;通过车辆可见障碍物斥力以及盲区虚拟斥力判断是否需要进行主动避撞;在需要进行主动避撞时,利用人工势场模型规划主动避撞路径;按照所规划的路径由电子控制单元ECU控制避撞;对当前驾驶员操作输入进行判断,决策是否归还车辆控制权;本发明结构合理,避撞路径规划效果好,安全性高。