
一种基于目标-干扰感知的目标跟踪方法.pdf

闪闪****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于目标-干扰感知的目标跟踪方法.pdf
本发明提出了一种基于目标‑干扰感知的目标跟踪方法,用以解决现有目标感知由于忽略背景干扰物的影响,造成目标跟踪出现漂移的技术问题。其步骤为:给定第一帧图像的目标坐标信息并截取目标模板,并获取重要性权重;其次,根据重要性权重分别计算目标模板和第n帧搜索图像对应的目标‑干扰感知特征;最后,将两个目标‑干扰感知特征进行相关操作得到响应图,响应值最大处即为第n帧搜索图像的目标位置;重复上述操作,直至跟踪结束。本发明将目标感知与干扰感知整合在同一个框架,使得跟踪器同时从背景干扰与目标信息中受益,有效的防止了背景干扰带

一种基于目标感知相关滤波的目标跟踪方法.pdf
本发明公开了一种基于目标感知相关滤波的目标跟踪方法,其包括以下步骤:步骤1、构建深度网络特征提取模型;步骤2、确定跟踪目标及标签;步骤3、提取目标深度特征,构建通道选择相关滤波器;步骤4、滤波器逆变换,取实部并全局池化求绝对值,选择L个较大值对应的深度特征构建目标感知相关滤波器模型;步骤5、确定目标搜索区域,提取L个通道特征;步骤6、应用目标感知相关滤波器确定跟踪目标位置及尺度;步骤7、应用线性迭代更新通道选择相关滤波器;步骤8、应用线性迭代更新目标感知相关滤波器;步骤9、循环执行,实现目标连续跟踪。本发

一种基于双层深度特征感知的目标跟踪方法.pdf
本发明公开了一种基于双层深度特征感知的目标跟踪方法,其包括以下步骤:步骤1、确定跟踪目标及Padding窗;步骤2、提取目标区域深度特征并加窗处理,进行第一层特征感知;步骤3、依据第一层感知特征创建特征感知相关滤波器;步骤4、计算特征感知相关滤波器的梯度图均值,选择L个较大值通道特征,完成第二层特征感知;步骤5、依据上一帧目标位置确定搜索区域尺度图像集合,提取第二层感知特征;步骤6、应用相关滤波确定目标位置及尺度;步骤7、应用跟踪结果的第一层感知特征更新特征感知相关滤波器;步骤8、循环执行步骤4、5、6、

一种基于压缩感知的目标散射特性测量干扰去除方法.pdf
本申请提供了一种基于压缩感知的目标散射特性测量干扰去除方法,其包括:采集待测目标的二维成像的信号,进行成像处理,并标记干扰区域;基于压缩感知的干扰处理,包括对所标记的干扰区域进行冗余化,提高干扰所在区域内的稀疏度,对冗余化后的区域内数据进行压缩感知雷达成像,成像后仅保留所标记的干扰区域内的结果;对所保留的结果进行处理获得干扰像;将所述干扰像与所述原始像对消,得到去除干扰后的成像结果。通过该方法,能够更高效地剔除雷达图像中的某些干扰成分,获得隐身装备更为准确的逆算RCS性能,在隐身装备的研发、生产、服役、维
一种基于运动状态变化感知的机动目标跟踪方法.pdf
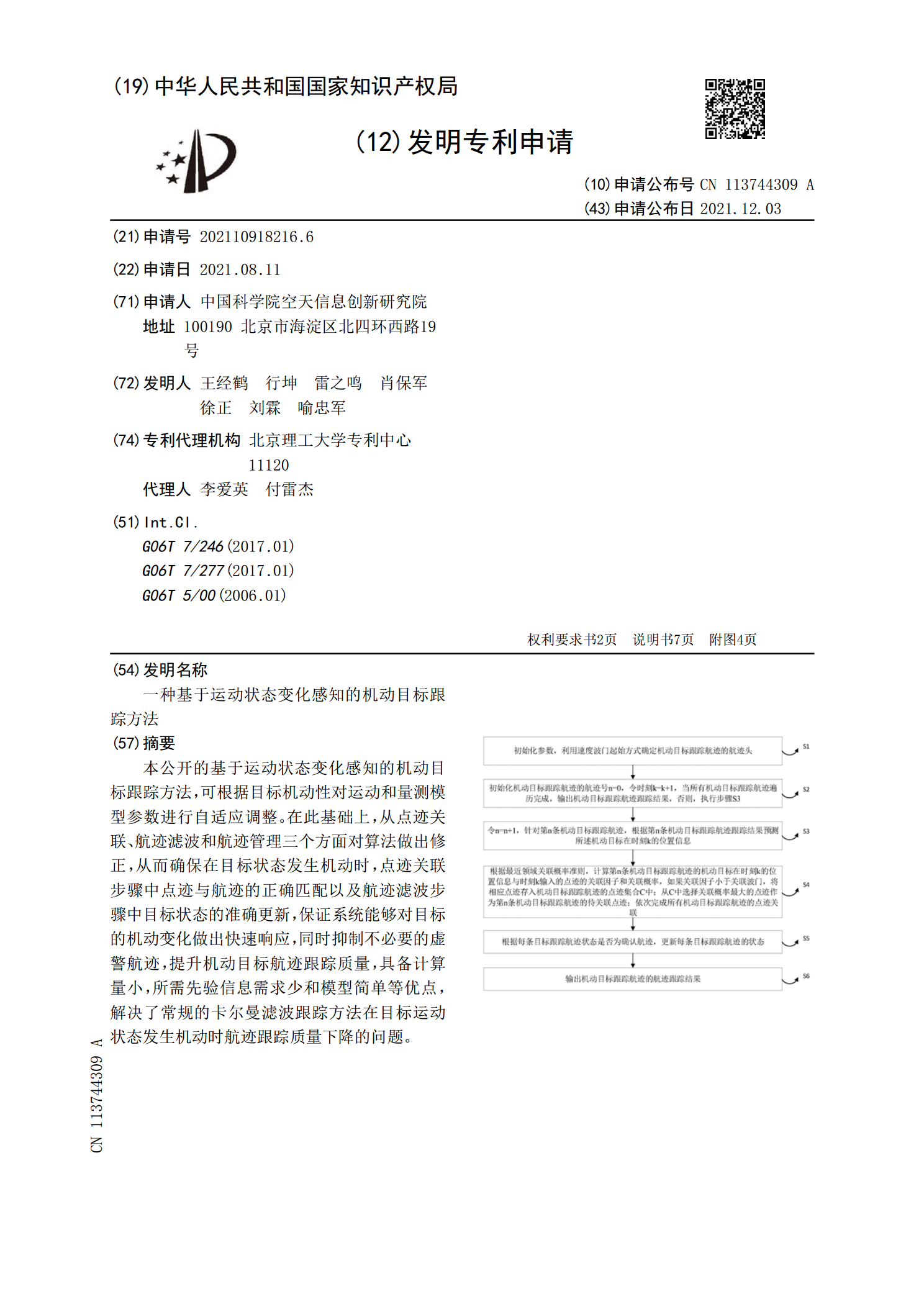
本公开的基于运动状态变化感知的机动目标跟踪方法,可根据目标机动性对运动和量测模型参数进行自适应调整。在此基础上,从点迹关联、航迹滤波和航迹管理三个方面对算法做出修正,从而确保在目标状态发生机动时,点迹关联步骤中点迹与航迹的正确匹配以及航迹滤波步骤中目标状态的准确更新,保证系统能够对目标的机动变化做出快速响应,同时抑制不必要的虚警航迹,提升机动目标航迹跟踪质量,具备计算量小,所需先验信息需求少和模型简单等优点,解决了常规的卡尔曼滤波跟踪方法在目标运动状态发生机动时航迹跟踪质量下降的问题。