
一种基于运动状态变化感知的机动目标跟踪方法.pdf

音景****ka

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于运动状态变化感知的机动目标跟踪方法.pdf
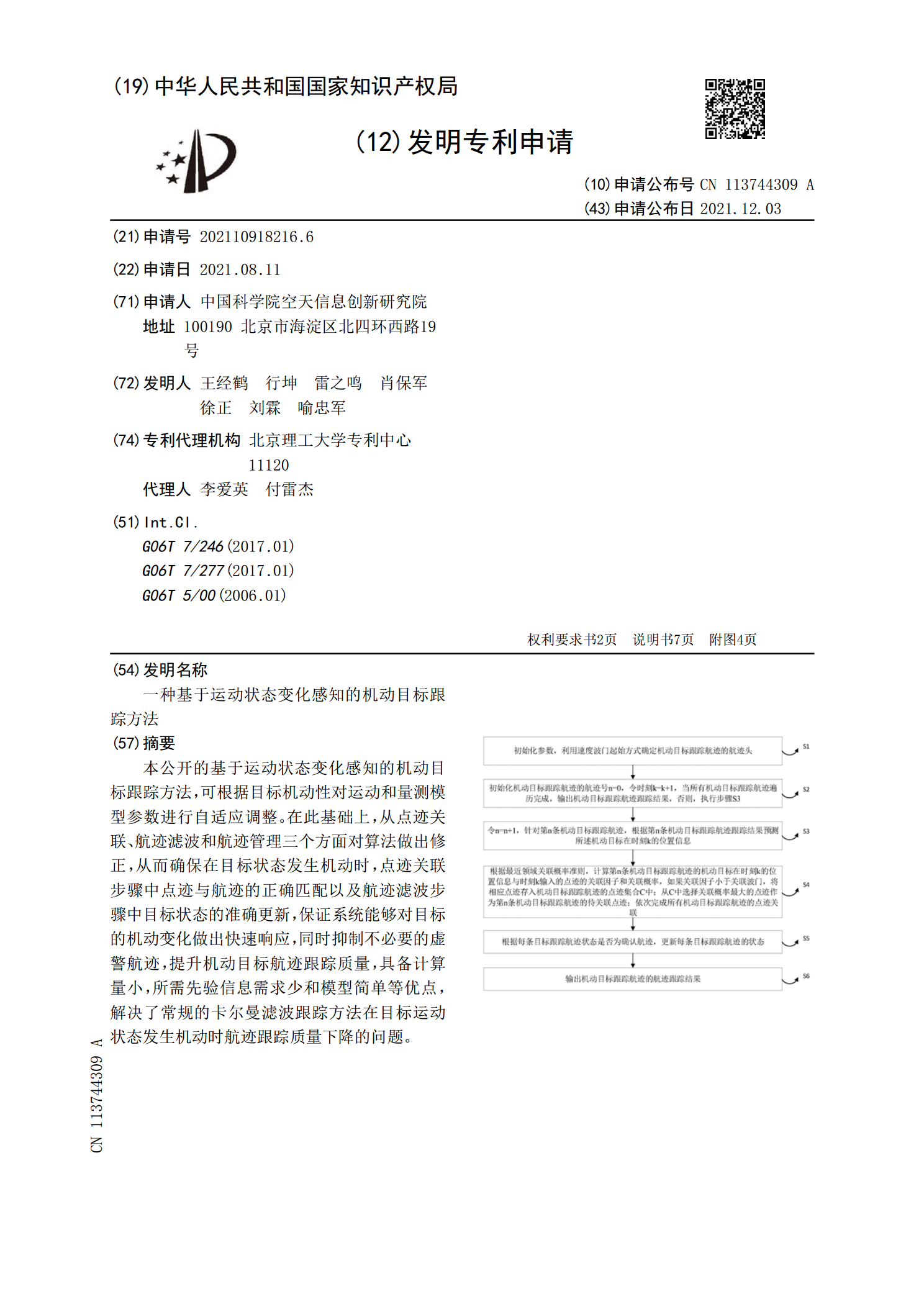
本公开的基于运动状态变化感知的机动目标跟踪方法,可根据目标机动性对运动和量测模型参数进行自适应调整。在此基础上,从点迹关联、航迹滤波和航迹管理三个方面对算法做出修正,从而确保在目标状态发生机动时,点迹关联步骤中点迹与航迹的正确匹配以及航迹滤波步骤中目标状态的准确更新,保证系统能够对目标的机动变化做出快速响应,同时抑制不必要的虚警航迹,提升机动目标航迹跟踪质量,具备计算量小,所需先验信息需求少和模型简单等优点,解决了常规的卡尔曼滤波跟踪方法在目标运动状态发生机动时航迹跟踪质量下降的问题。

基于能量感知的机动目标跟踪算法研究.docx
基于能量感知的机动目标跟踪算法研究一个机动的目标跟踪算法可以有很多种方法来实现。一种较为常见的方法是基于能量感知的跟踪算法。这种算法基于图像中目标的能量分布以及其在时间上的变化,实现对目标的跟踪。在本文中,我们将探讨基于能量感知的机动目标跟踪算法的研究及其实现。一、基本概念1.能量分布目标在图像中的能量分布可以由其在空间和频域上的表现来表示。在空间上,目标通常会表现为图像中的一个连通区域。在频域上,目标分布在图像的低频区域。2.图像序列图像序列是一系列的图像,每一张图像对应着一个时间点。在跟踪算法中,图像

一种基于目标-干扰感知的目标跟踪方法.pdf
本发明提出了一种基于目标‑干扰感知的目标跟踪方法,用以解决现有目标感知由于忽略背景干扰物的影响,造成目标跟踪出现漂移的技术问题。其步骤为:给定第一帧图像的目标坐标信息并截取目标模板,并获取重要性权重;其次,根据重要性权重分别计算目标模板和第n帧搜索图像对应的目标‑干扰感知特征;最后,将两个目标‑干扰感知特征进行相关操作得到响应图,响应值最大处即为第n帧搜索图像的目标位置;重复上述操作,直至跟踪结束。本发明将目标感知与干扰感知整合在同一个框架,使得跟踪器同时从背景干扰与目标信息中受益,有效的防止了背景干扰带

一种基于目标感知相关滤波的目标跟踪方法.pdf
本发明公开了一种基于目标感知相关滤波的目标跟踪方法,其包括以下步骤:步骤1、构建深度网络特征提取模型;步骤2、确定跟踪目标及标签;步骤3、提取目标深度特征,构建通道选择相关滤波器;步骤4、滤波器逆变换,取实部并全局池化求绝对值,选择L个较大值对应的深度特征构建目标感知相关滤波器模型;步骤5、确定目标搜索区域,提取L个通道特征;步骤6、应用目标感知相关滤波器确定跟踪目标位置及尺度;步骤7、应用线性迭代更新通道选择相关滤波器;步骤8、应用线性迭代更新目标感知相关滤波器;步骤9、循环执行,实现目标连续跟踪。本发

基于能量感知的机动目标跟踪算法研究的中期报告.docx
基于能量感知的机动目标跟踪算法研究的中期报告一、研究背景随着机器人技术的发展,机动目标跟踪成为了机器人中的一个重要问题。传统的目标跟踪算法需要对目标进行形状、颜色、纹理等特征进行提取,但这些算法在复杂的环境下容易受到干扰,导致跟踪结果不稳定。同时,目标的形状、大小、颜色等特征也可能会发生变化,导致跟踪算法难以适应新的场景。为了解决这个问题,本研究基于能量感知的机动目标跟踪算法,利用机器学习中的强化学习方法,解决了跟踪不稳定的问题,同时提高了跟踪的精度与效率。二、研究内容1.算法原理本研究算法基于能量感知,