
工件定位方法、装置、系统、设备与介质.pdf

一只****ng

1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工件定位方法、装置、系统、设备与介质.pdf
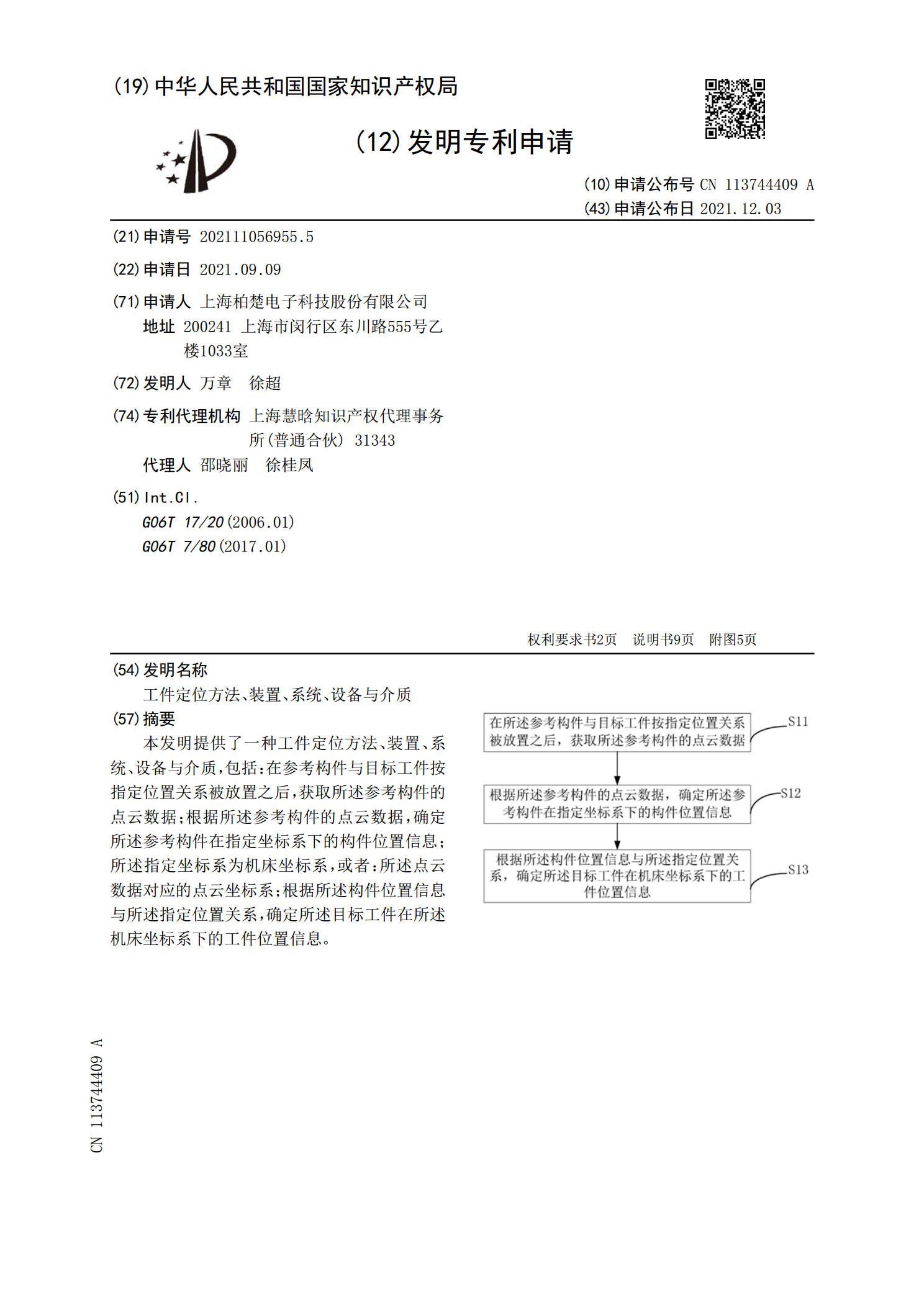
本发明提供了一种工件定位方法、装置、系统、设备与介质,包括:在参考构件与目标工件按指定位置关系被放置之后,获取所述参考构件的点云数据;根据所述参考构件的点云数据,确定所述参考构件在指定坐标系下的构件位置信息;所述指定坐标系为机床坐标系,或者:所述点云数据对应的点云坐标系;根据所述构件位置信息与所述指定位置关系,确定所述目标工件在所述机床坐标系下的工件位置信息。
工件定位方法、装置、系统、电子设备以及存储介质.pdf
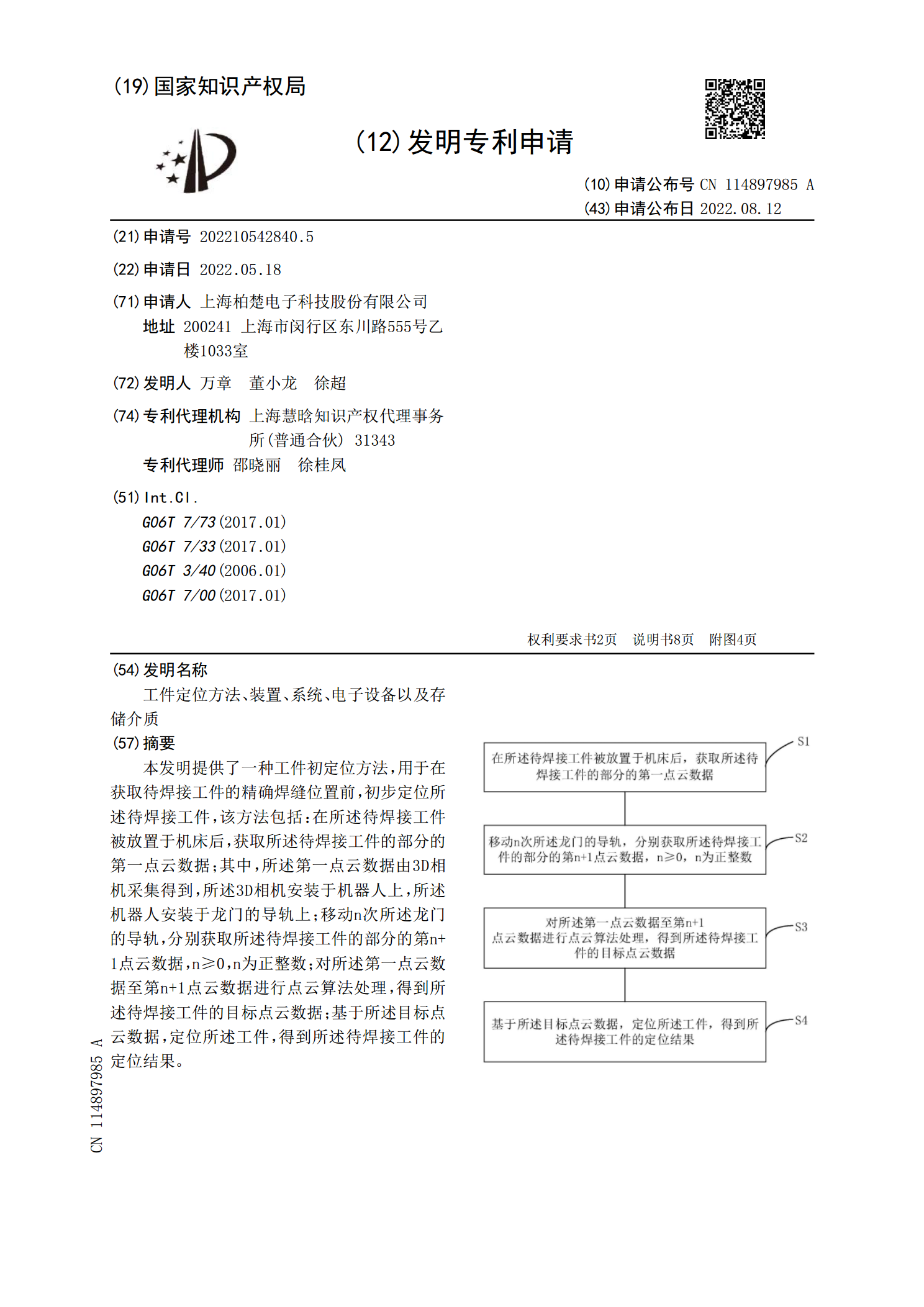
本发明提供了一种工件初定位方法,用于在获取待焊接工件的精确焊缝位置前,初步定位所述待焊接工件,该方法包括:在所述待焊接工件被放置于机床后,获取所述待焊接工件的部分的第一点云数据;其中,所述第一点云数据由3D相机采集得到,所述3D相机安装于机器人上,所述机器人安装于龙门的导轨上;移动n次所述龙门的导轨,分别获取所述待焊接工件的部分的第n+1点云数据,n≥0,n为正整数;对所述第一点云数据至第n+1点云数据进行点云算法处理,得到所述待焊接工件的目标点云数据;基于所述目标点云数据,定位所述工件,得到所述待焊接工
定位方法及装置、设备、定位系统以及存储介质.pdf
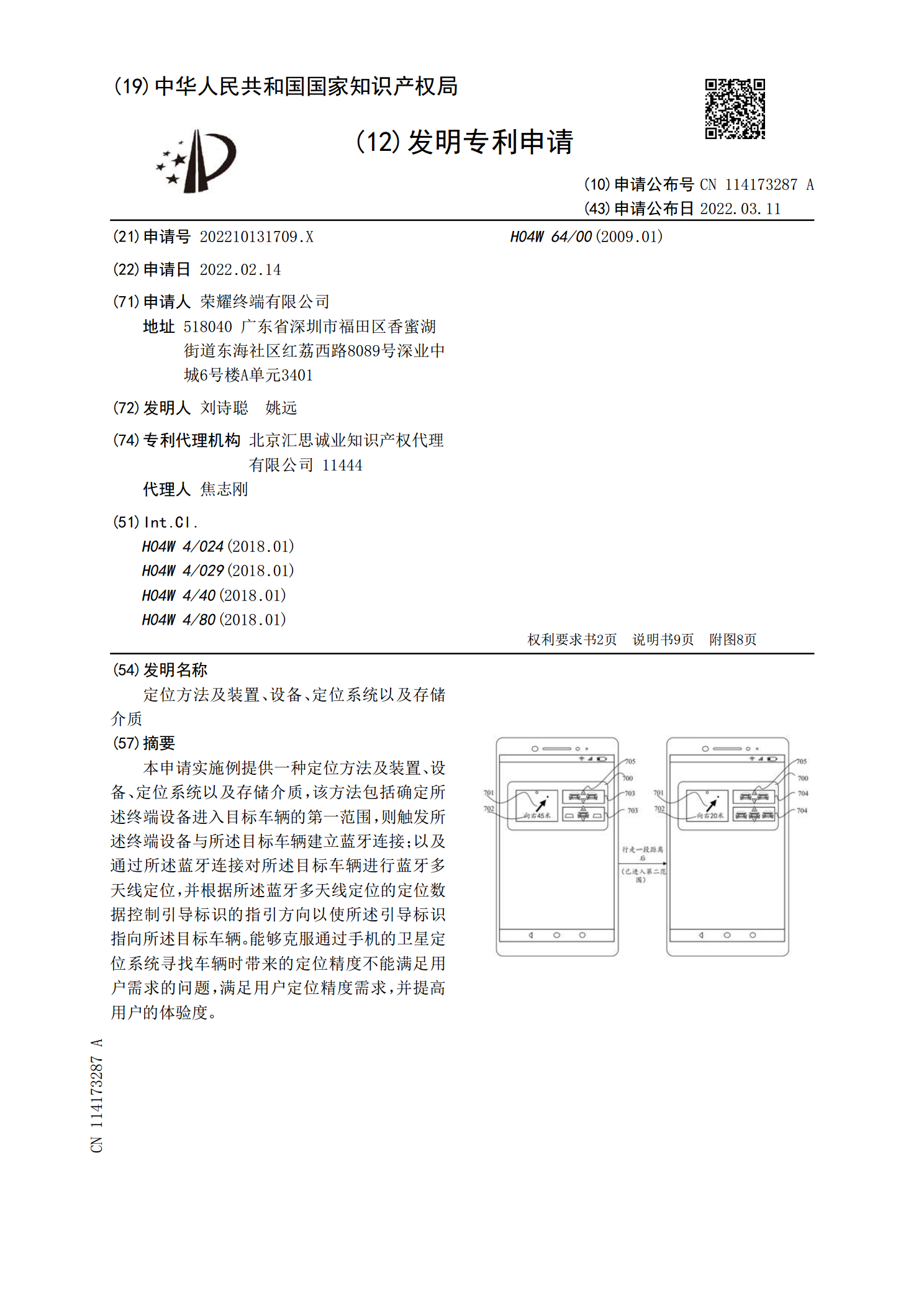
本申请实施例提供一种定位方法及装置、设备、定位系统以及存储介质,该方法包括确定所述终端设备进入目标车辆的第一范围,则触发所述终端设备与所述目标车辆建立蓝牙连接;以及通过所述蓝牙连接对所述目标车辆进行蓝牙多天线定位,并根据所述蓝牙多天线定位的定位数据控制引导标识的指引方向以使所述引导标识指向所述目标车辆。能够克服通过手机的卫星定位系统寻找车辆时带来的定位精度不能满足用户需求的问题,满足用户定位精度需求,并提高用户的体验度。
定位方法、装置、设备、系统和存储介质.pdf
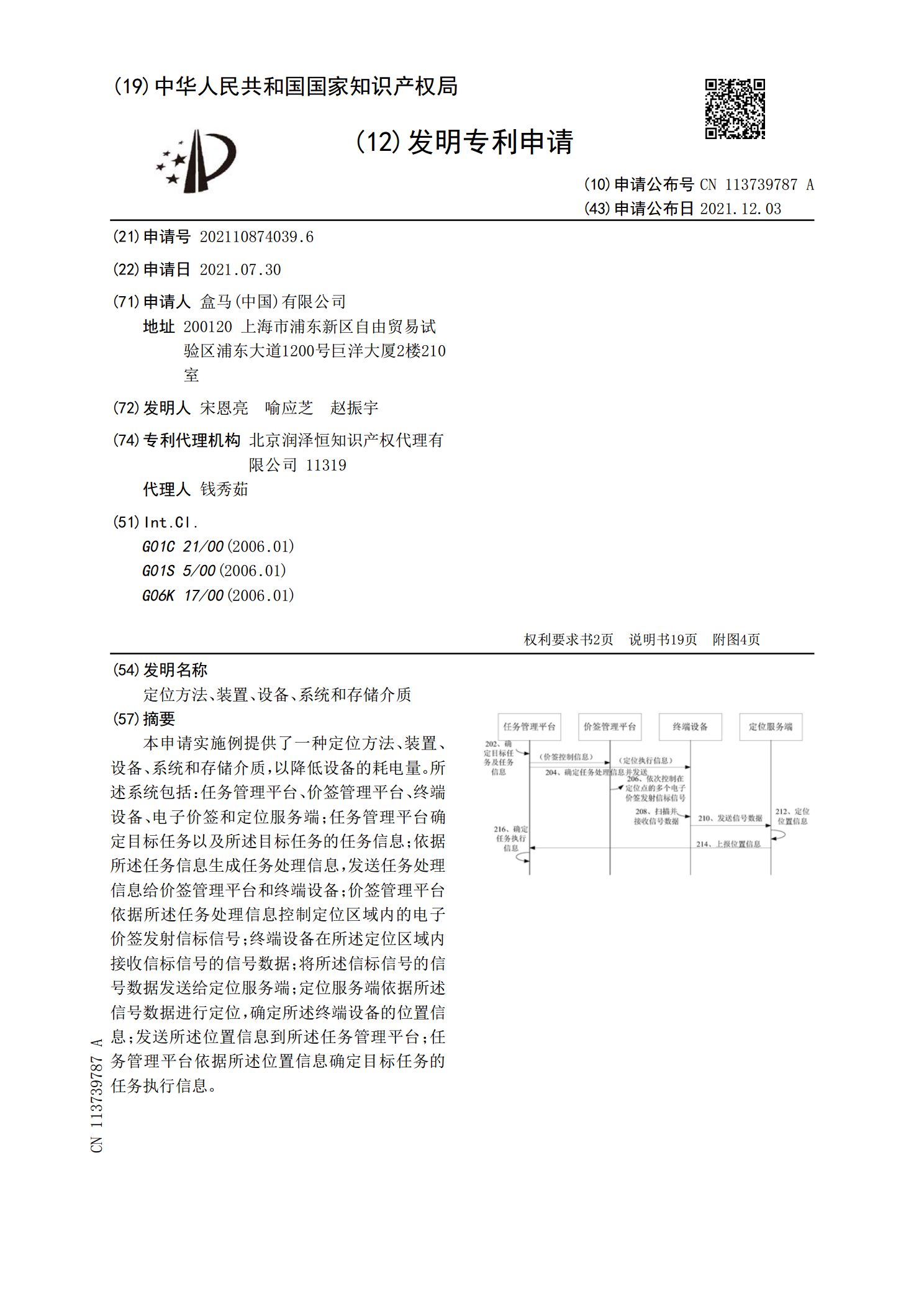
本申请实施例提供了一种定位方法、装置、设备、系统和存储介质,以降低设备的耗电量。所述系统包括:任务管理平台、价签管理平台、终端设备、电子价签和定位服务端;任务管理平台确定目标任务以及所述目标任务的任务信息;依据所述任务信息生成任务处理信息,发送任务处理信息给价签管理平台和终端设备;价签管理平台依据所述任务处理信息控制定位区域内的电子价签发射信标信号;终端设备在所述定位区域内接收信标信号的信号数据;将所述信标信号的信号数据发送给定位服务端;定位服务端依据所述信号数据进行定位,确定所述终端设备的位置信息;发送
自移动设备定位方法、装置、存储介质、设备及系统.pdf
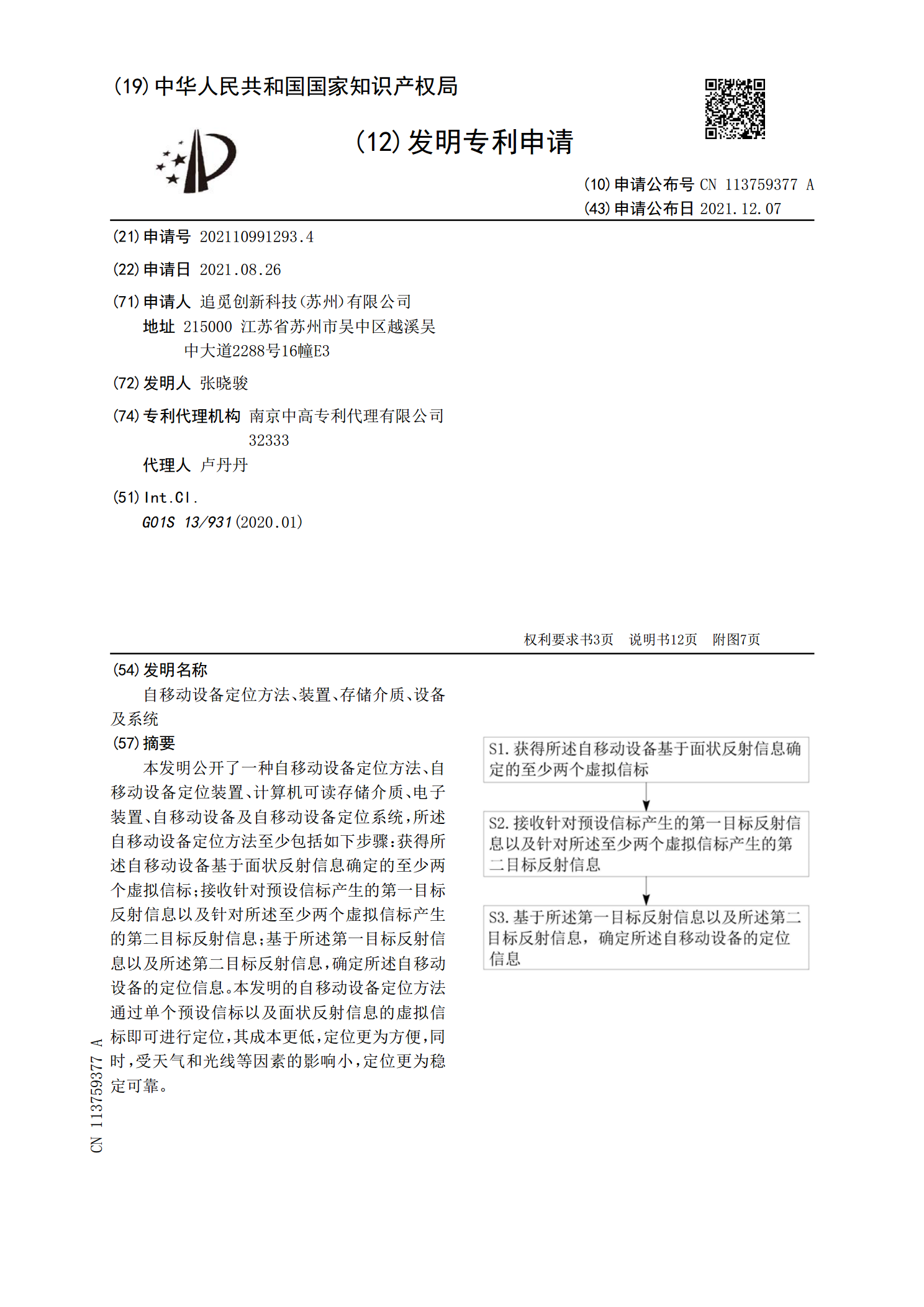
本发明公开了一种自移动设备定位方法、自移动设备定位装置、计算机可读存储介质、电子装置、自移动设备及自移动设备定位系统,所述自移动设备定位方法至少包括如下步骤:获得所述自移动设备基于面状反射信息确定的至少两个虚拟信标;接收针对预设信标产生的第一目标反射信息以及针对所述至少两个虚拟信标产生的第二目标反射信息;基于所述第一目标反射信息以及所述第二目标反射信息,确定所述自移动设备的定位信息。本发明的自移动设备定位方法通过单个预设信标以及面状反射信息的虚拟信标即可进行定位,其成本更低,定位更为方便,同时,受天气和光