
挖掘机控制方法、装置、挖掘机及存储介质.pdf

一吃****书竹


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
挖掘机控制方法、装置、挖掘机及存储介质.pdf
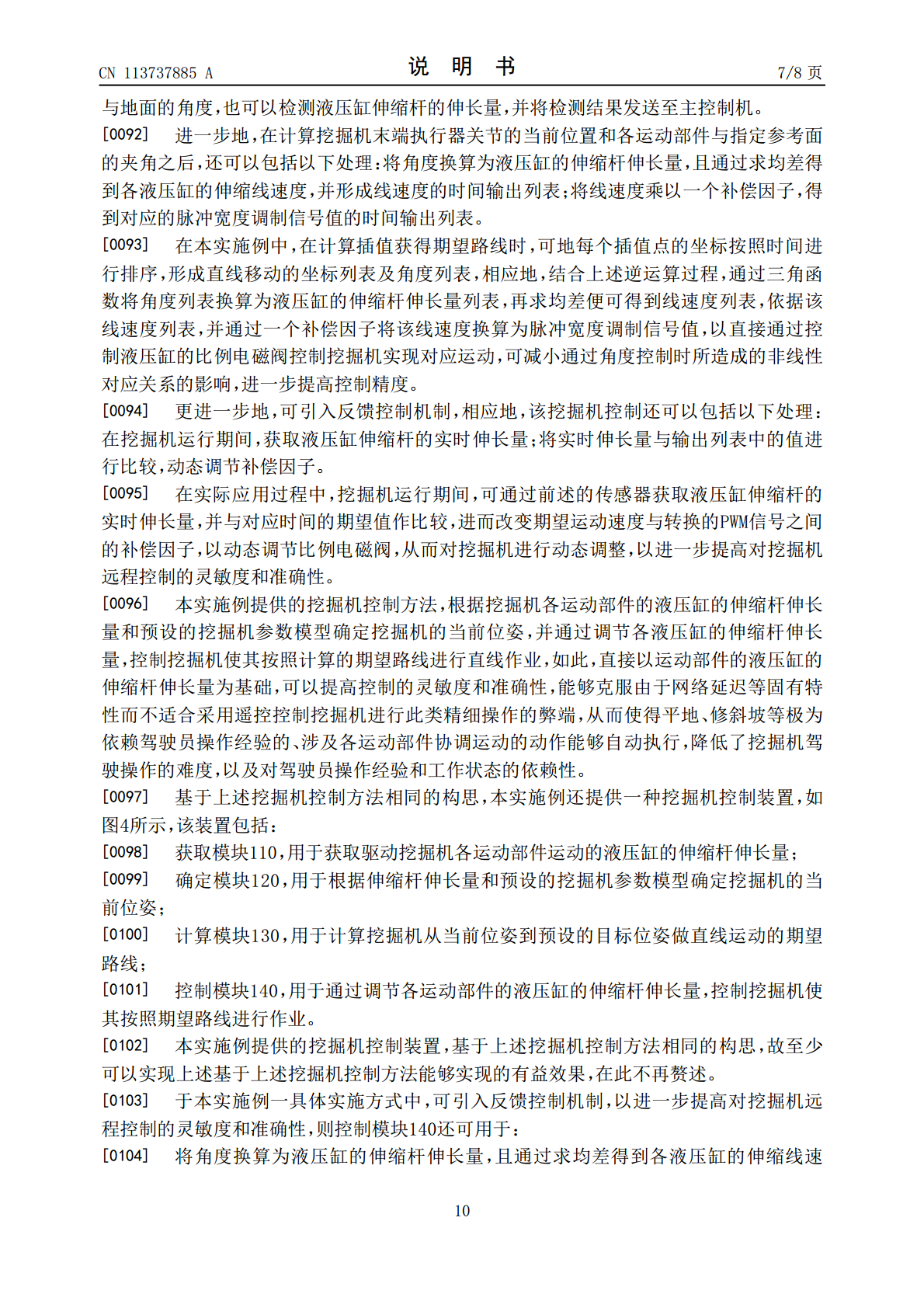
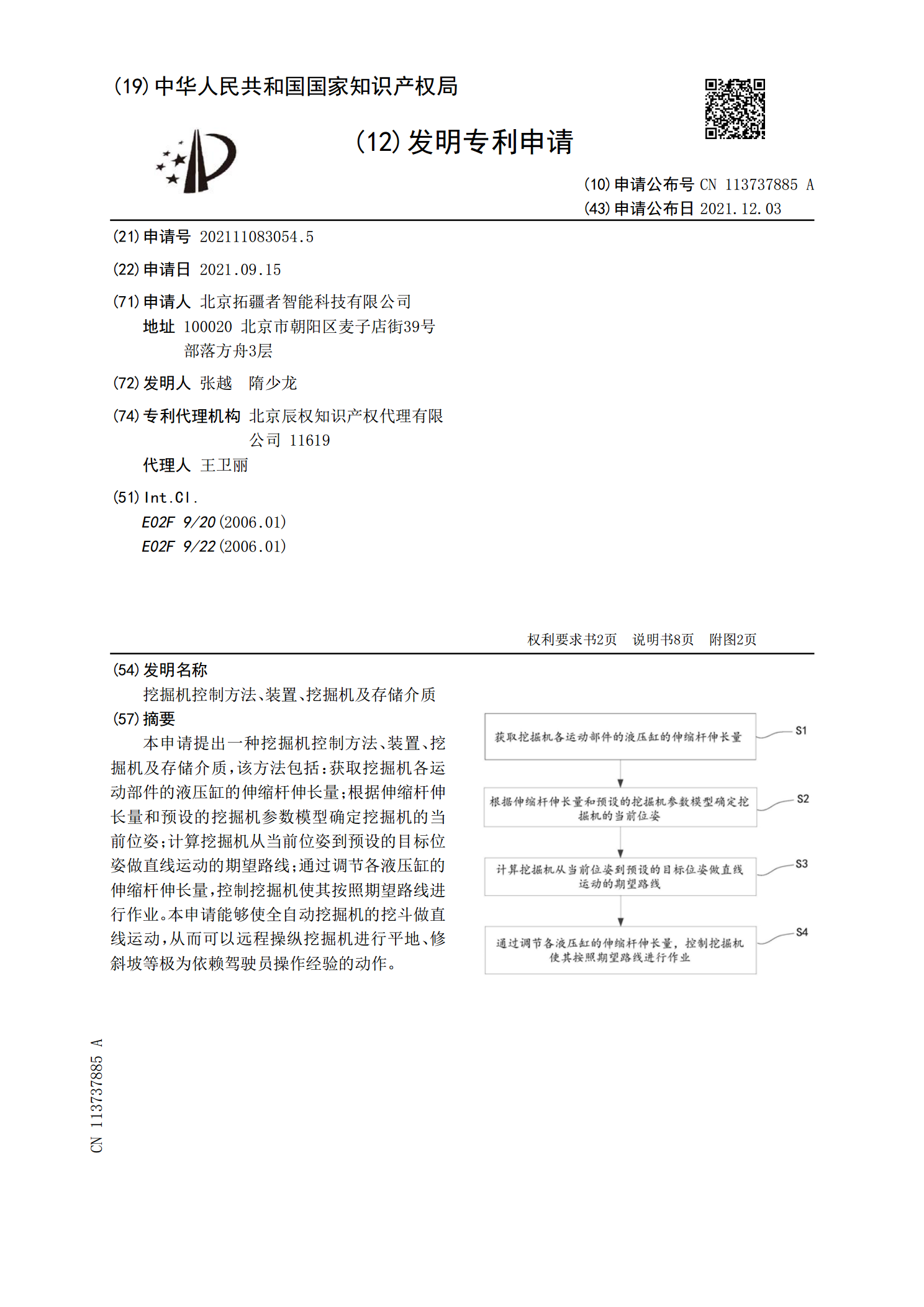
本申请提出一种挖掘机控制方法、装置、挖掘机及存储介质,该方法包括:获取挖掘机各运动部件的液压缸的伸缩杆伸长量;根据伸缩杆伸长量和预设的挖掘机参数模型确定挖掘机的当前位姿;计算挖掘机从当前位姿到预设的目标位姿做直线运动的期望路线;通过调节各液压缸的伸缩杆伸长量,控制挖掘机使其按照期望路线进行作业。本申请能够使全自动挖掘机的挖斗做直线运动,从而可以远程操纵挖掘机进行平地、修斜坡等极为依赖驾驶员操作经验的动作。

挖掘机行走控制方法、装置、控制器、存储介质及挖掘机.pdf
本发明提供一种挖掘机行走控制方法、装置、控制器、存储介质及挖掘机,涉及工程设备技术领域。该方法包括:通过角度传感器获取上车架相对于下车架的回转角度,根据回转角度所在的角度范围,确定先导阀输出的行走指令对应的转向指令,根据转向指令,通过转向指令对应的换向阀,控制换向阀对应的行走马达,使得换向阀对应的行走马达驱动行走马达对应的行走履带行走。通过获取回转角度,并根据回转角度和行走指令确定转向指令,根据转向指令通过控制换向阀控制对应的行走履带,避免人为观察下车架驱动轮与驾驶室的位置,来操控挖掘的行走方向,减小了操
智能辅助爬坡控制方法、系统、装置、挖掘机及存储介质.pdf
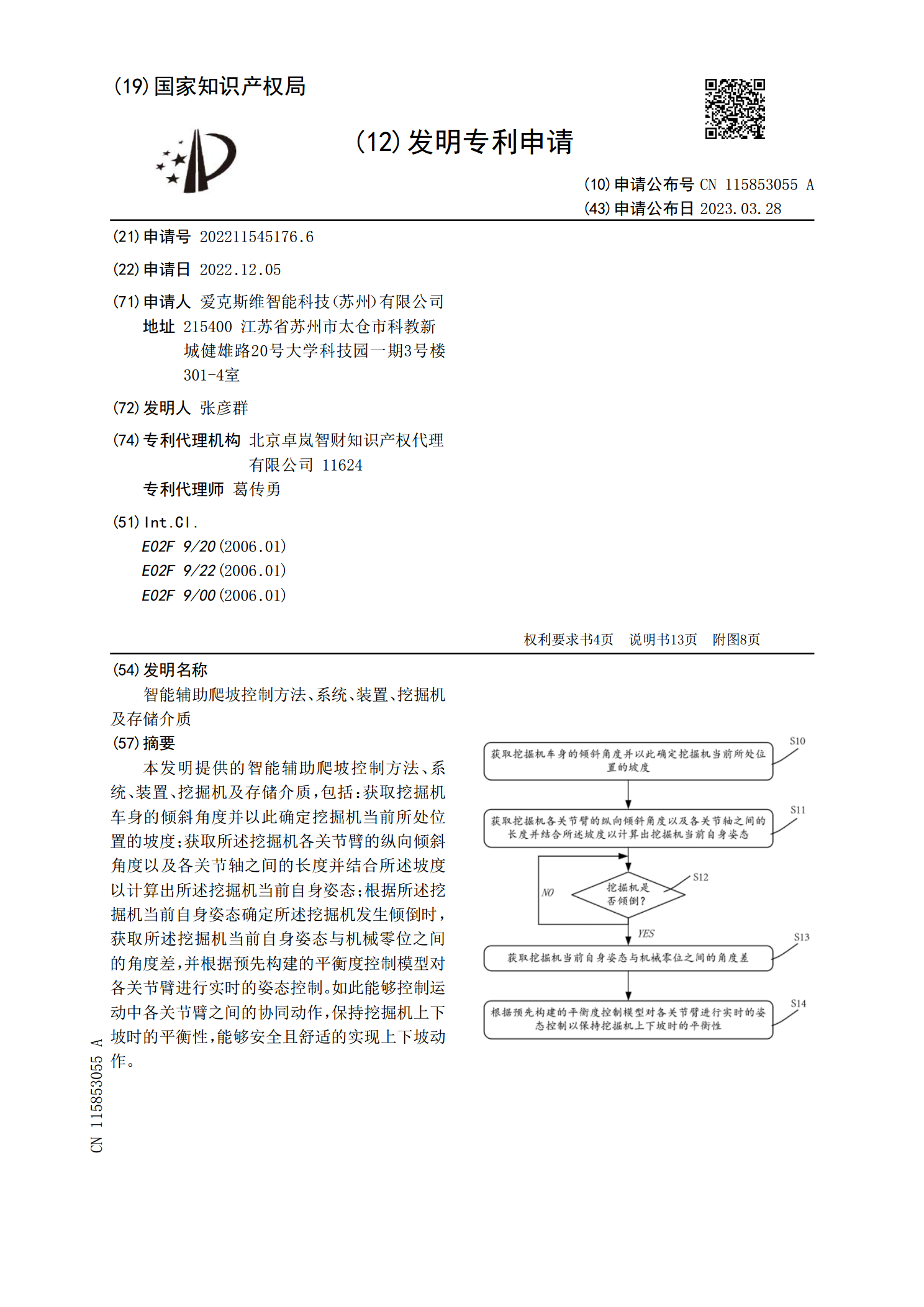
本发明提供的智能辅助爬坡控制方法、系统、装置、挖掘机及存储介质,包括:获取挖掘机车身的倾斜角度并以此确定挖掘机当前所处位置的坡度;获取所述挖掘机各关节臂的纵向倾斜角度以及各关节轴之间的长度并结合所述坡度以计算出所述挖掘机当前自身姿态;根据所述挖掘机当前自身姿态确定所述挖掘机发生倾倒时,获取所述挖掘机当前自身姿态与机械零位之间的角度差,并根据预先构建的平衡度控制模型对各关节臂进行实时的姿态控制。如此能够控制运动中各关节臂之间的协同动作,保持挖掘机上下坡时的平衡性,能够安全且舒适的实现上下坡动作。

一种挖掘机势能回收控制方法、系统、挖掘机及存储介质.pdf
本申请公开了一种挖掘机势能回收控制方法,所述方法包括:当检测到挖掘机动臂处于下降工作状态时,根据挖掘机的电机发电能、液压蓄能器充入能量和主泵能耗确定挖掘机能量消耗函数;通过最小加权偏差法计算所述挖掘机能量消耗函数的最优工作点;其中,所述最优工作点包括能耗最低场景下的液压蓄能器的初始工作压力、所述液压蓄能器的初始工作容积、回收马达排量和电机制动力矩;根据所述最优工作点对所述挖掘机动臂的势能进行回收。本申请能够实现挖掘机势能的高效回收,保证势能回收系统回收率的最大化。本申请还公开了一种挖掘机势能回收控制系统、

挖掘机、用于挖掘机的控制装置和控制挖掘机的方法.pdf
挖掘机、用于挖掘机的控制装置和控制挖掘机的方法。所述挖掘机具有用于移动挖掘机部件的多个液压缸,以便在工作场地利用挖掘机铲斗或其它挖掘机工具完成挖掘,所述控制装置包括:多个液压控制阀,所述液压控制阀中的每一个均与液压缸中的相应一个相连,用于控制施加到液压缸中的相应一个的液压流体压力;和多个手动致动的操纵杆阀,用于将液压流体压力供应至相应的液压控制阀,以控制液压缸的运动。所述控制装置包括用于感测一个或多个挖掘机部件的位置的传感器部件。