
智能辅助爬坡控制方法、系统、装置、挖掘机及存储介质.pdf

是向****23


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能辅助爬坡控制方法、系统、装置、挖掘机及存储介质.pdf
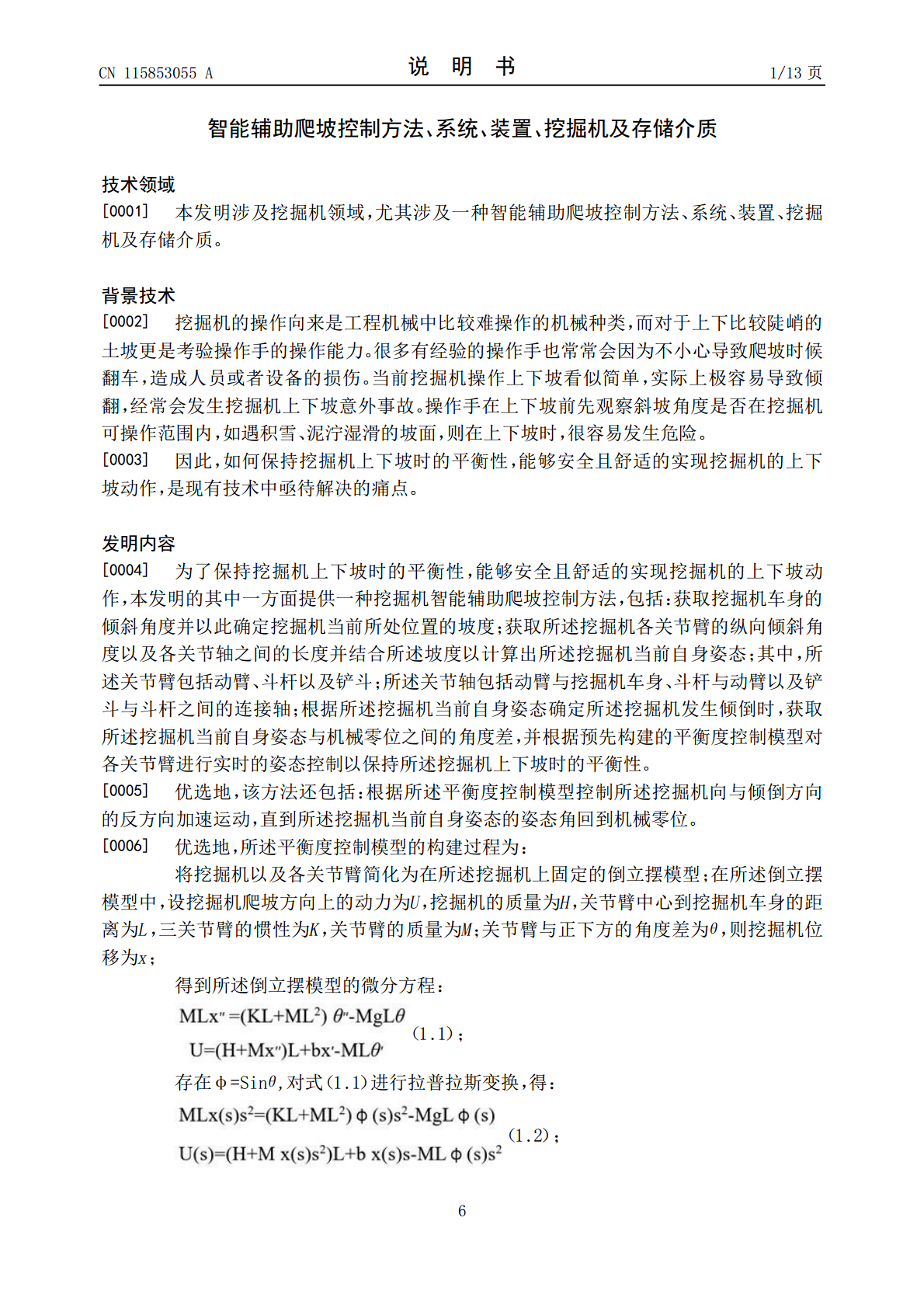
本发明提供的智能辅助爬坡控制方法、系统、装置、挖掘机及存储介质,包括:获取挖掘机车身的倾斜角度并以此确定挖掘机当前所处位置的坡度;获取所述挖掘机各关节臂的纵向倾斜角度以及各关节轴之间的长度并结合所述坡度以计算出所述挖掘机当前自身姿态;根据所述挖掘机当前自身姿态确定所述挖掘机发生倾倒时,获取所述挖掘机当前自身姿态与机械零位之间的角度差,并根据预先构建的平衡度控制模型对各关节臂进行实时的姿态控制。如此能够控制运动中各关节臂之间的协同动作,保持挖掘机上下坡时的平衡性,能够安全且舒适的实现上下坡动作。

智能设备的控制方法、装置、智能系统和存储介质.pdf
本申请提出一种智能设备的控制方法、装置、智能系统和存储介质,能够根据目标用户的状态信息,分析目标用户对智能设备的潜在控制行为,目标用户的状态信息包括目标用户的行为动作信息和/或生理参数信息,从活跃智能设备中确定出与潜在控制行为对应的目标智能设备,其中,活跃智能设备包括能够被目标用户控制的智能设备,以便于根据潜在控制行为,对目标智能设备进行控制,进而实现了根据用户的状态信息主动对智能设备进行控制,不需要用户主动提出的需求,不仅使用方便,还能够提升用户体验。
智能家居系统的控制方法、装置、系统及存储介质、设备.pdf
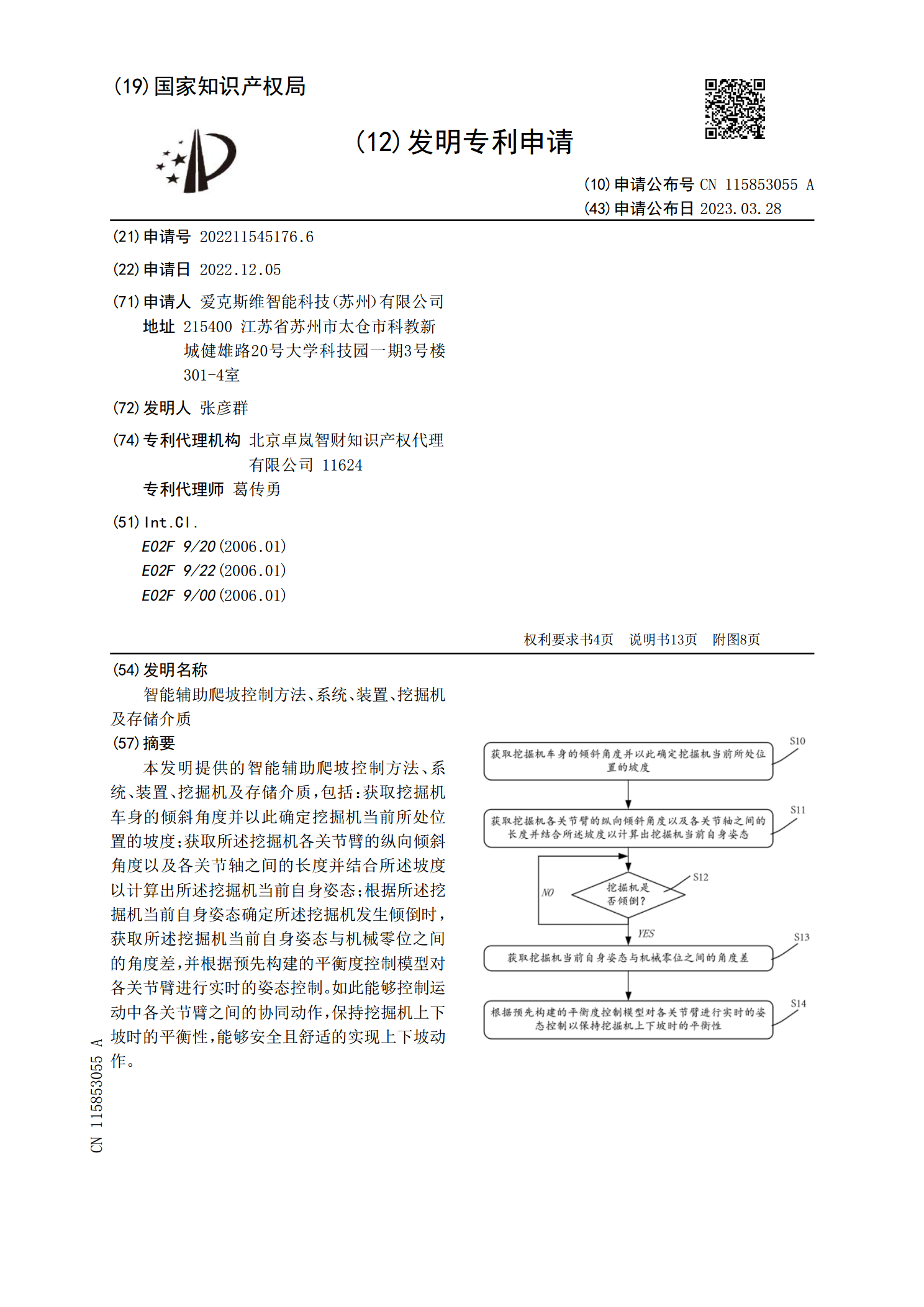
本发明提供了一种智能家居系统的控制方法、装置、系统及存储介质、设备,该方法包括:根据客户端设备触发的控制操作生成控制指令,控制指令携带待控制智能终端设备的设备标识;根据设备标识获取待控制智能终端设备所接入智能盆栽的盆栽标识,将控制指令发送到对应的智能盆栽,以供智能盆栽在接收到控制指令后启动气氛渲染装置,以响应客户端设备的指令发送操作,指示智能盆栽正在执行对智能终端设备的控制功能,以及智能盆栽根据设备标识查找预设的设备列表,以获取待控制智能终端设备的地址信息并进行广播。本发明实现了通过智能盆栽控制智能家居系
智能家居的控制方法、装置、系统以及存储介质.pdf
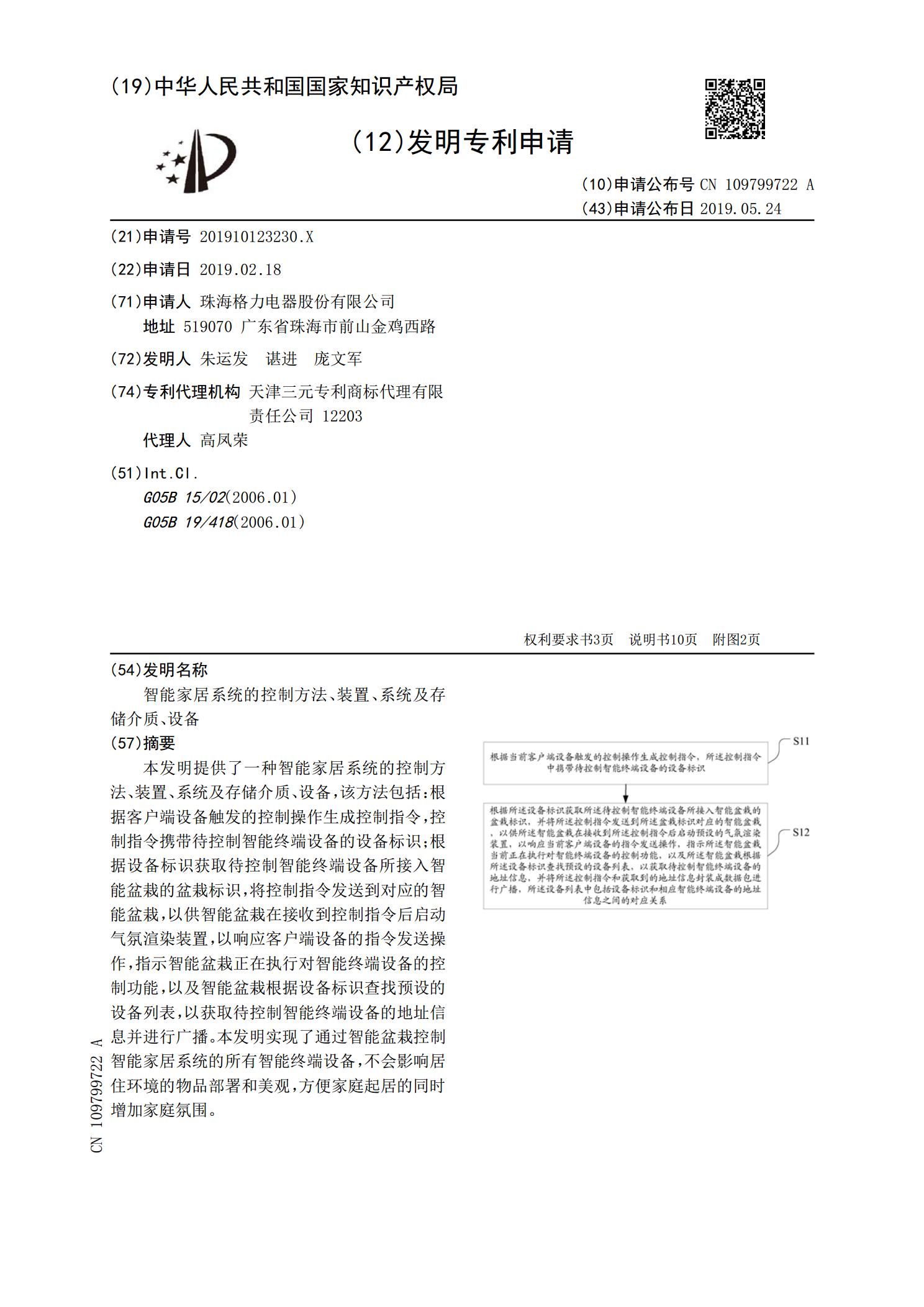
本发明公开了一种智能家居的控制方法、装置、系统以及存储介质。其中,该方法包括:获取目标用户的生物识别信息,其中,上述生物识别信息至少包括:面部图像信息;在采用上述生物识别信息对智能门锁进行验证开锁成功后,对上述面部图像信息进行解析处理,得到上述目标用户的年龄信息和情绪信息;在检测到上述目标用户进入目标区域后,基于上述年龄信息和上述情绪信息选取音乐播放列表,并自动播放上述音乐播放列表中的音乐。本发明解决了现有技术中无法实现自动播放用户想听的音乐造成的便捷度低、用户体验感差的技术问题。
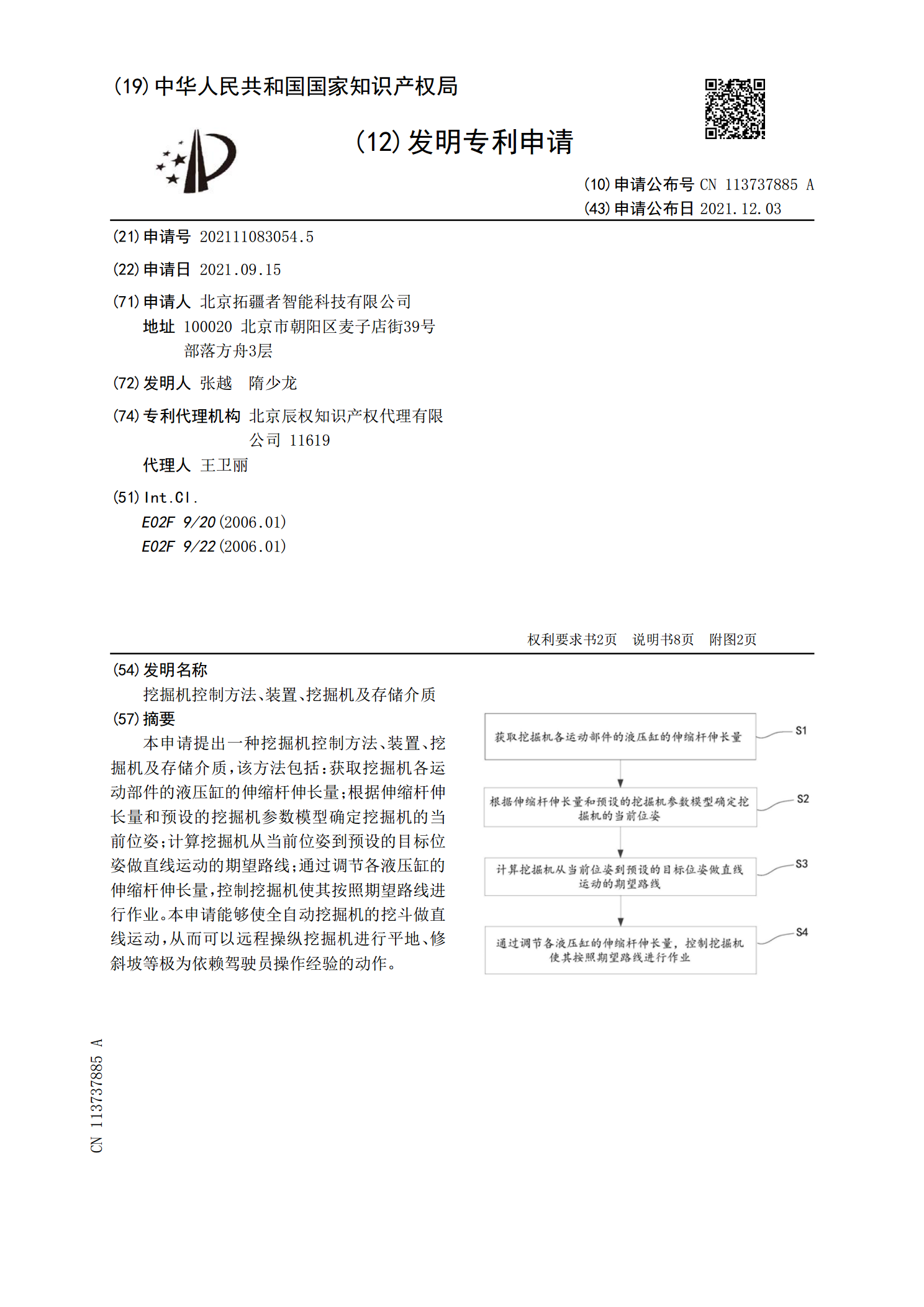
挖掘机控制方法、装置、挖掘机及存储介质.pdf
本申请提出一种挖掘机控制方法、装置、挖掘机及存储介质,该方法包括:获取挖掘机各运动部件的液压缸的伸缩杆伸长量;根据伸缩杆伸长量和预设的挖掘机参数模型确定挖掘机的当前位姿;计算挖掘机从当前位姿到预设的目标位姿做直线运动的期望路线;通过调节各液压缸的伸缩杆伸长量,控制挖掘机使其按照期望路线进行作业。本申请能够使全自动挖掘机的挖斗做直线运动,从而可以远程操纵挖掘机进行平地、修斜坡等极为依赖驾驶员操作经验的动作。