
一种雷达标定方法、装置、设备及存储介质.pdf

Ke****67

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载雷达的标定方法、装置、设备及存储介质.pdf
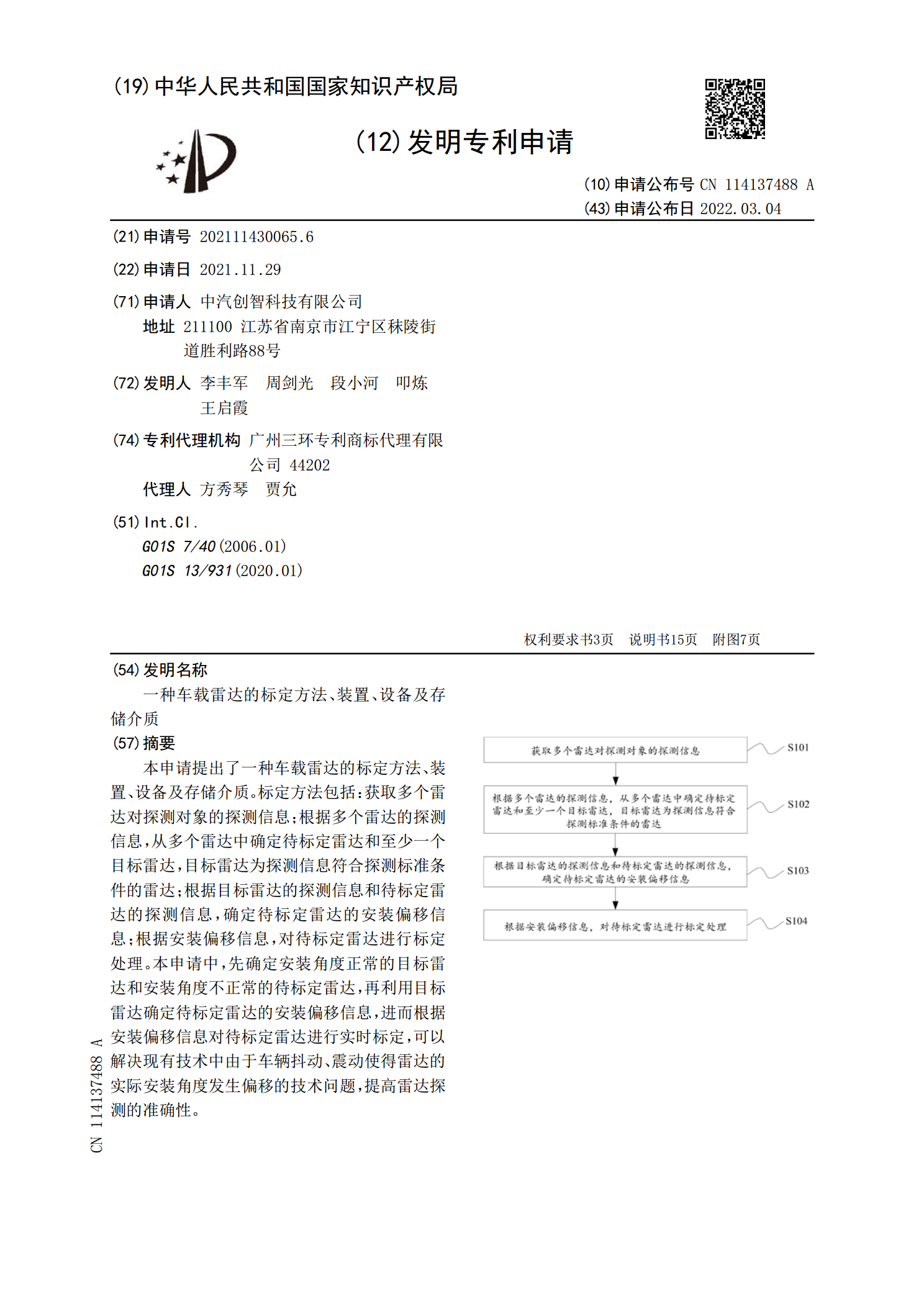
本申请提出了一种车载雷达的标定方法、装置、设备及存储介质。标定方法包括:获取多个雷达对探测对象的探测信息;根据多个雷达的探测信息,从多个雷达中确定待标定雷达和至少一个目标雷达,目标雷达为探测信息符合探测标准条件的雷达;根据目标雷达的探测信息和待标定雷达的探测信息,确定待标定雷达的安装偏移信息;根据安装偏移信息,对待标定雷达进行标定处理。本申请中,先确定安装角度正常的目标雷达和安装角度不正常的待标定雷达,再利用目标雷达确定待标定雷达的安装偏移信息,进而根据安装偏移信息对待标定雷达进行实时标定,可以解决现有技
一种雷达标定方法、装置、设备及存储介质.pdf
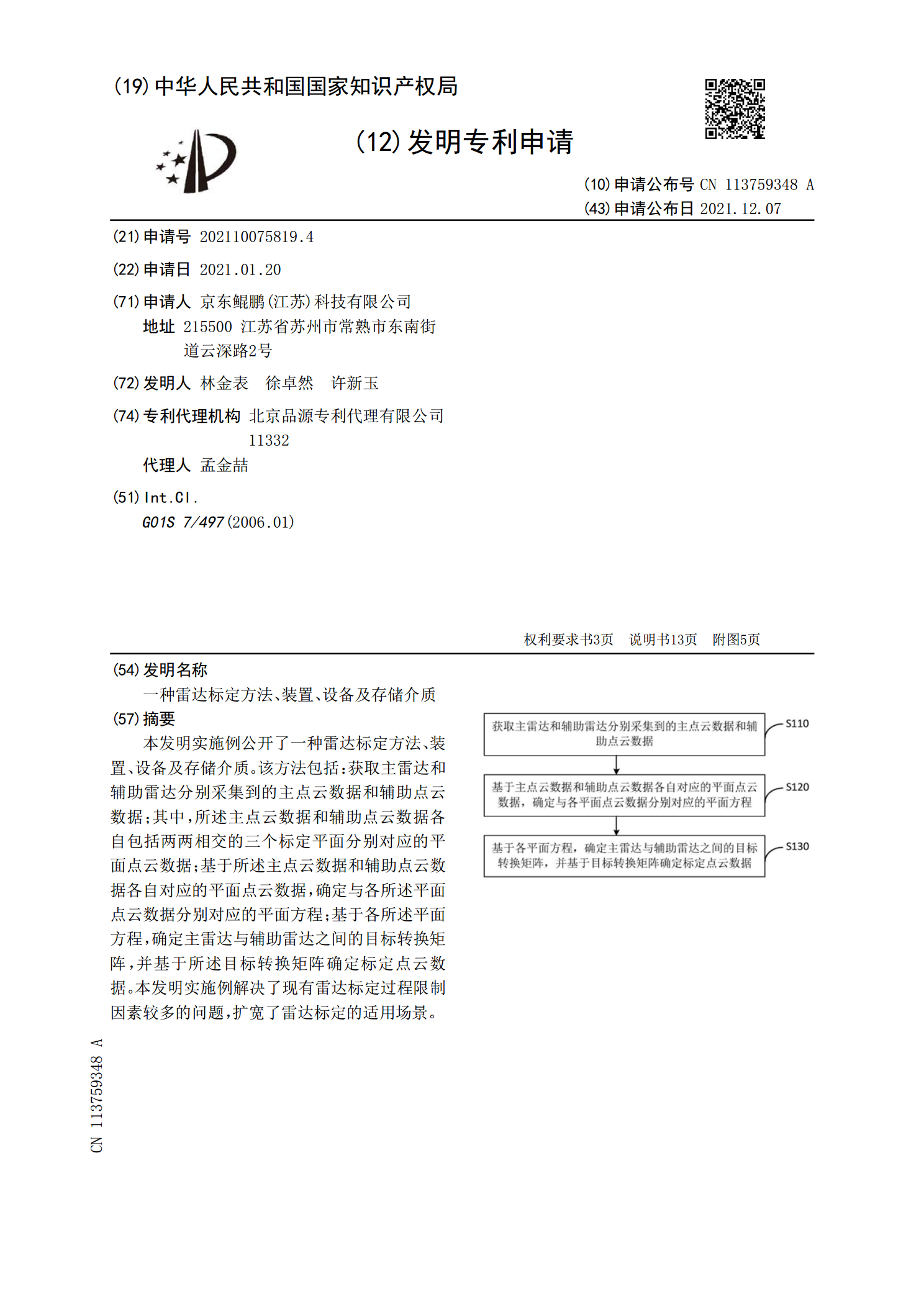
本发明实施例公开了一种雷达标定方法、装置、设备及存储介质。该方法包括:获取主雷达和辅助雷达分别采集到的主点云数据和辅助点云数据;其中,所述主点云数据和辅助点云数据各自包括两两相交的三个标定平面分别对应的平面点云数据;基于所述主点云数据和辅助点云数据各自对应的平面点云数据,确定与各所述平面点云数据分别对应的平面方程;基于各所述平面方程,确定主雷达与辅助雷达之间的目标转换矩阵,并基于所述目标转换矩阵确定标定点云数据。本发明实施例解决了现有雷达标定过程限制因素较多的问题,扩宽了雷达标定的适用场景。
一种车载雷达标定方法、装置、车载设备及存储介质.pdf
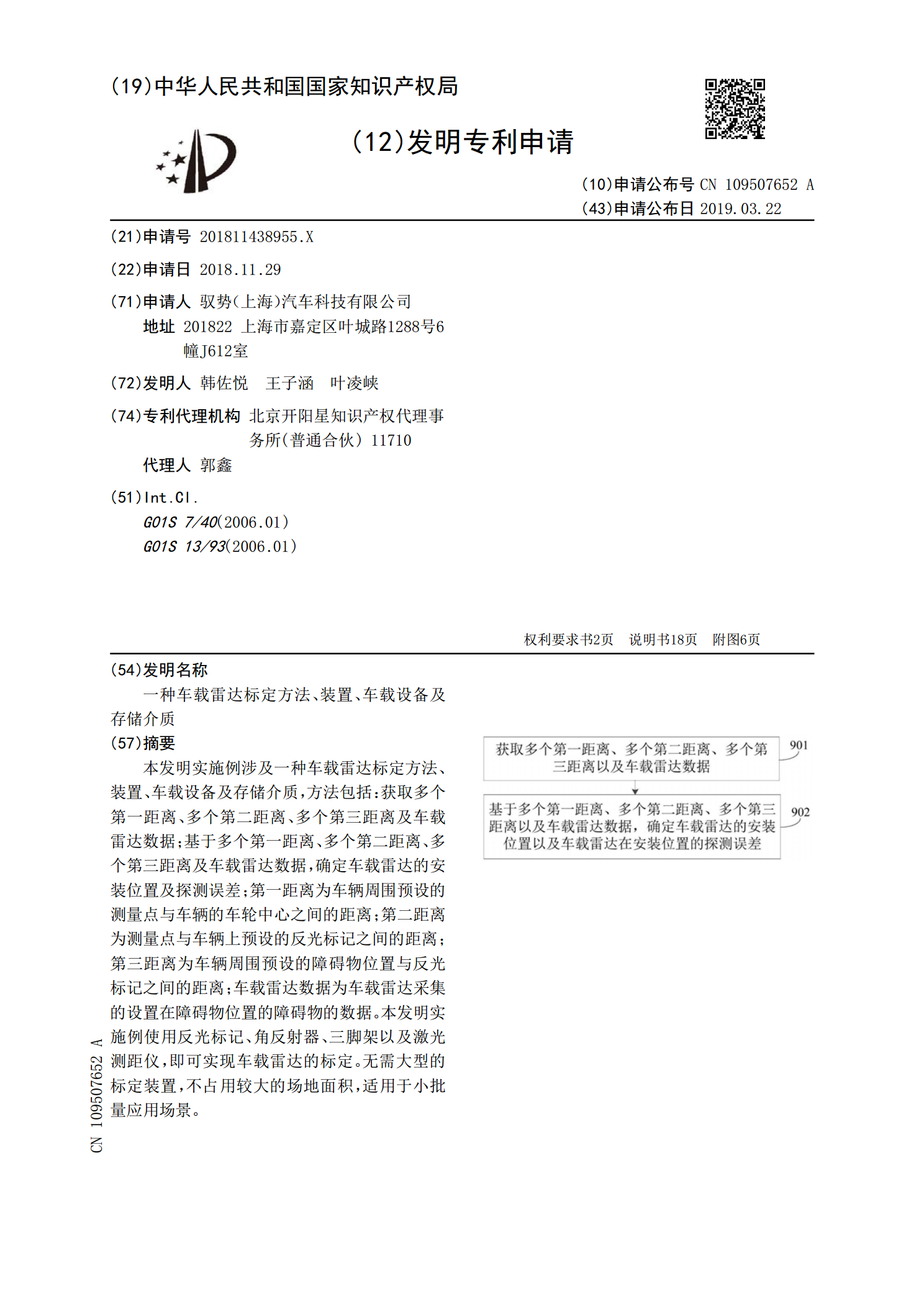
本发明实施例涉及一种车载雷达标定方法、装置、车载设备及存储介质,方法包括:获取多个第一距离、多个第二距离、多个第三距离及车载雷达数据;基于多个第一距离、多个第二距离、多个第三距离及车载雷达数据,确定车载雷达的安装位置及探测误差;第一距离为车辆周围预设的测量点与车辆的车轮中心之间的距离;第二距离为测量点与车辆上预设的反光标记之间的距离;第三距离为车辆周围预设的障碍物位置与反光标记之间的距离;车载雷达数据为车载雷达采集的设置在障碍物位置的障碍物的数据。本发明实施例使用反光标记、角反射器、三脚架以及激光测距仪,
一种双偏振雷达快速标定方法、装置及存储介质.pdf
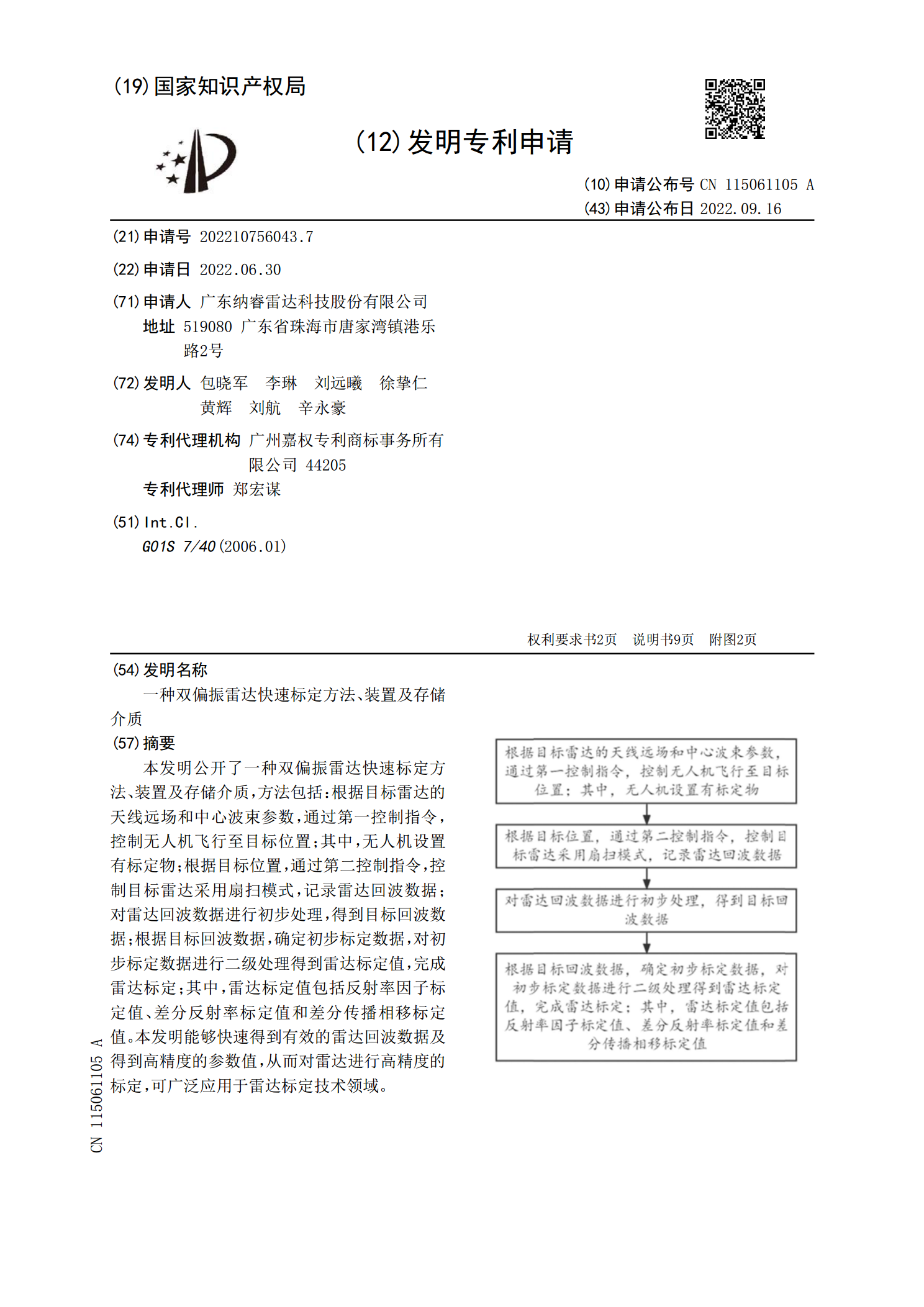
本发明公开了一种双偏振雷达快速标定方法、装置及存储介质,方法包括:根据目标雷达的天线远场和中心波束参数,通过第一控制指令,控制无人机飞行至目标位置;其中,无人机设置有标定物;根据目标位置,通过第二控制指令,控制目标雷达采用扇扫模式,记录雷达回波数据;对雷达回波数据进行初步处理,得到目标回波数据;根据目标回波数据,确定初步标定数据,对初步标定数据进行二级处理得到雷达标定值,完成雷达标定;其中,雷达标定值包括反射率因子标定值、差分反射率标定值和差分传播相移标定值。本发明能够快速得到有效的雷达回波数据及得到高精
雷达模组的数据标定方法及装置、系统、设备、存储介质.pdf
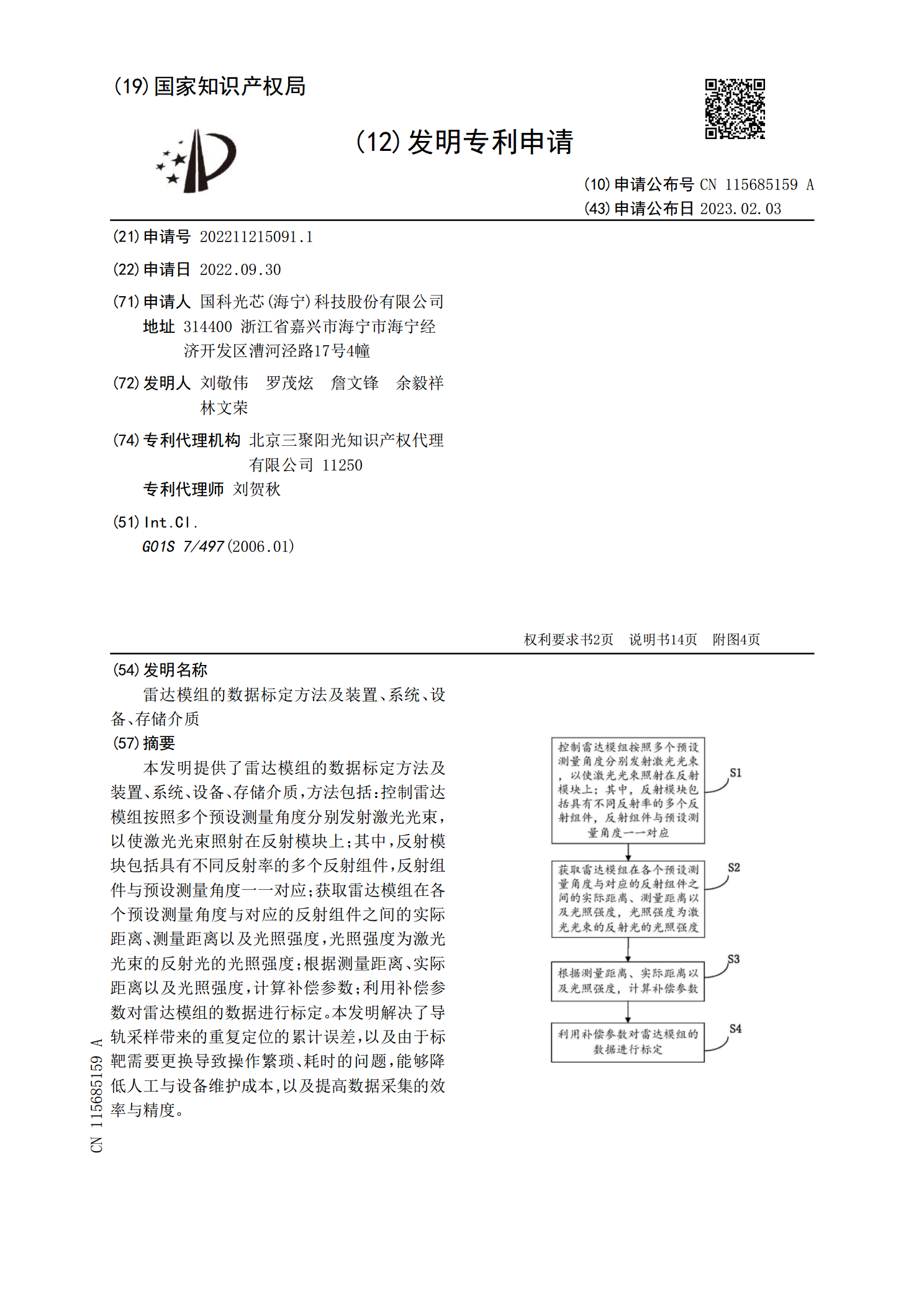
本发明提供了雷达模组的数据标定方法及装置、系统、设备、存储介质,方法包括:控制雷达模组按照多个预设测量角度分别发射激光光束,以使激光光束照射在反射模块上;其中,反射模块包括具有不同反射率的多个反射组件,反射组件与预设测量角度一一对应;获取雷达模组在各个预设测量角度与对应的反射组件之间的实际距离、测量距离以及光照强度,光照强度为激光光束的反射光的光照强度;根据测量距离、实际距离以及光照强度,计算补偿参数;利用补偿参数对雷达模组的数据进行标定。本发明解决了导轨采样带来的重复定位的累计误差,以及由于标靶需要更换