
用于制造杆的方法和设备.pdf

一吃****福乾

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于制造杆的方法和设备.pdf
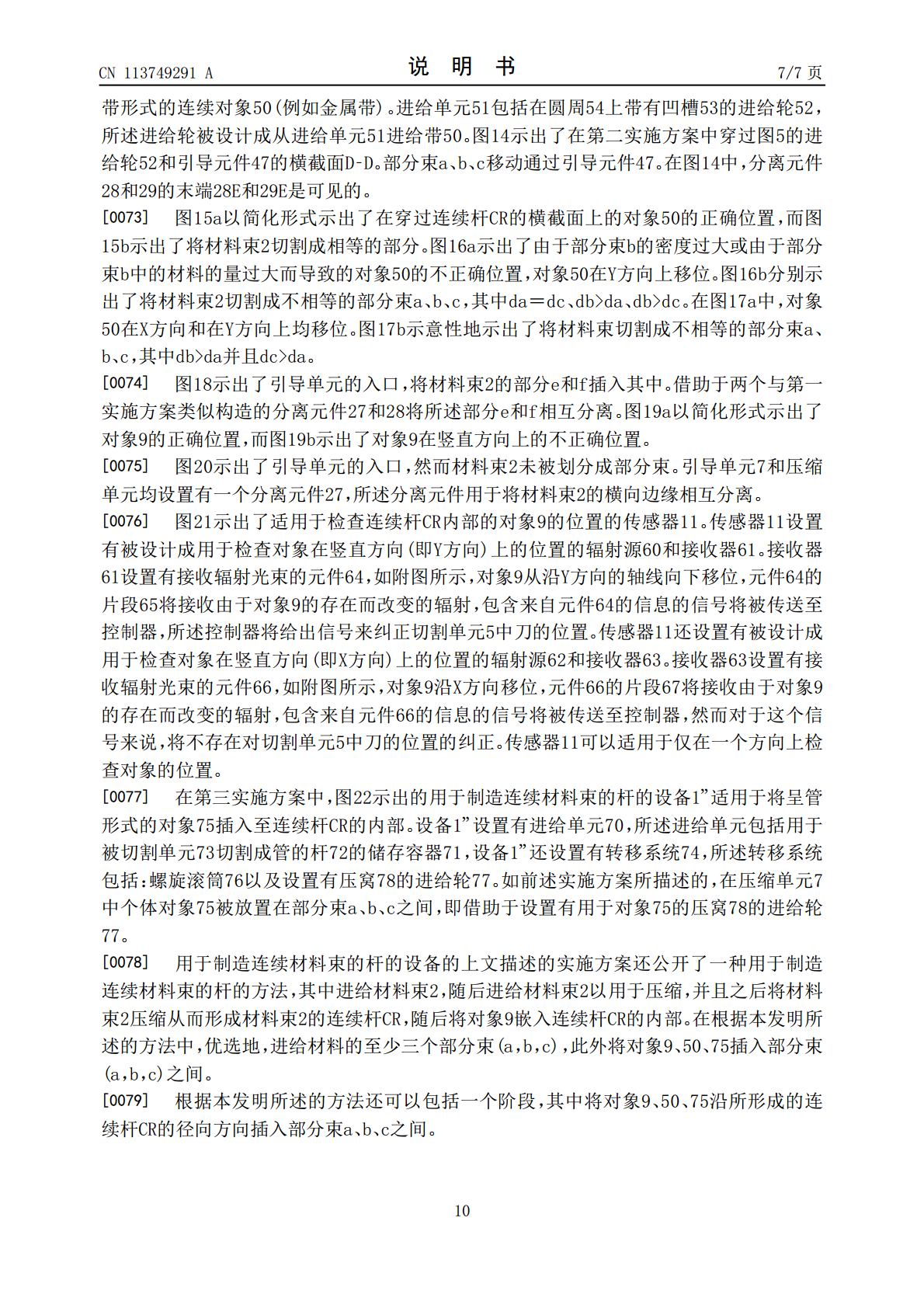
本申请的目的是一种用于制造连续材料束(2)的杆的设备,包括:进给单元(3),用于进给材料束(2);引导单元(6),用于引导材料束(2);压缩单元(7),用于压缩所述束且形成材料束(2)的连续杆(CR);以及对象进给单元(8,51,70),用于进给对象(9,50,75)至压缩单元(7),所述设备适于进给材料束(2)的三个部分束(a,b,c),而所述部分束(a,b,c)被进给通过引导单元(6)至压缩单元(7),其特征在于,对象进给单元(8,51,70)适于将对象(9,50,75)沿形成的连续杆(CR)的径向方
用于制造杆的方法和装置.pdf
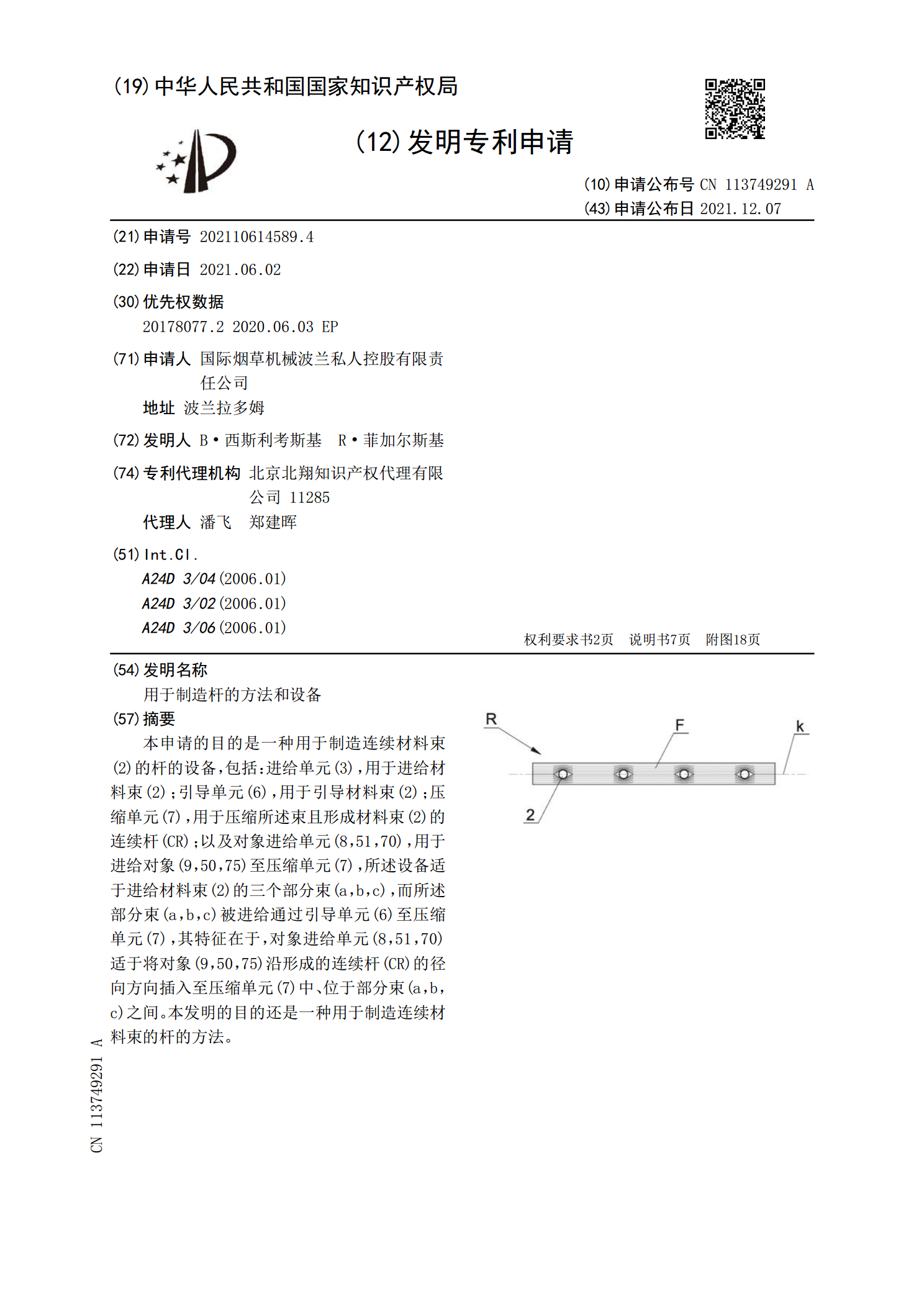
本申请的目的是用于制造连续材料束(2)的杆的装置,包括用于供给材料束(2)的供给单元(3)、用于引导材料束(2)的引导单元(6)、用于压缩束且形成材料束(2)的连续杆(CR)的压缩单元(7)、用于将物体(9、50、75)供给到压缩单元(7)的物体供给单元(8、51、70)。装置的特征在于设有切割单元(5),用于将材料束(2)纵向切割成至少两个部分束(a、b、c),通过引导单元(6)将部分束(a、b、c)供给到压缩单元(7)。装置的特征还在于设有用于调节切割单元(5)中的至少一个切割元件(15、16、35、
用于制造中间杆的方法.pdf
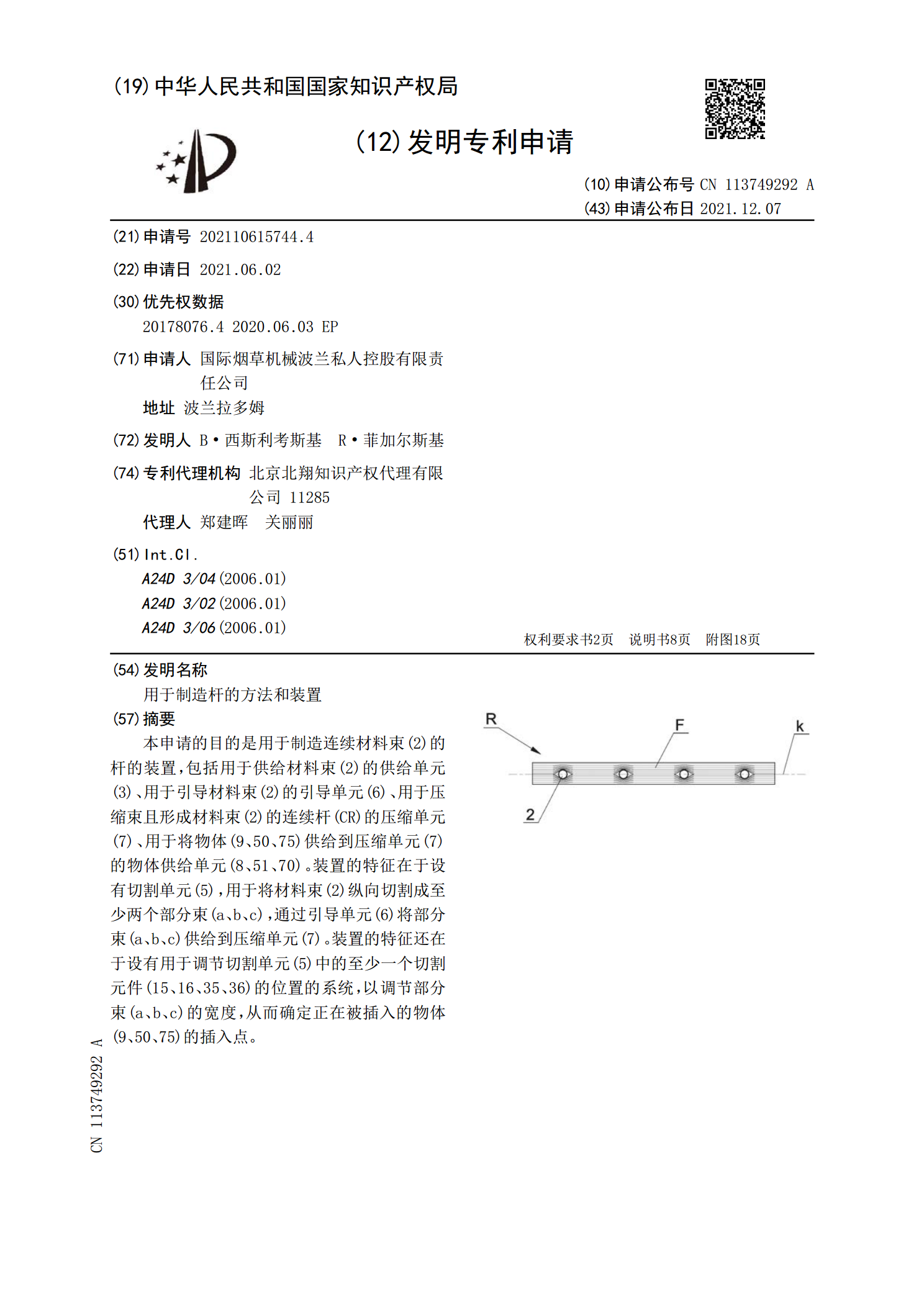
本发明提出了一种用于制造针对内燃机的冲程可变的气门机构的中间杆(1)的方法,该中间杆(1)在第一端侧端部(3)处具有用于凸轮盘的止推面(2),在中间区域(5)中具有用于冲程凸轮的配对运行面(4),在第二端侧端部处具有作用到从动元件上的一件式接连的冲程传递面(6),以及具有用于凸轮回调弹簧的止挡部(7),该冲程传递面作为滑动面存在并且沿着杆枢转方向延伸。在此,冲程传递面(6)的端部轮廓无再加工地通过压印制成。

杯式挺杆和用于制造这种杯式挺杆的方法.pdf
提出了用于内燃机的杯式挺杆(1、1’)和用于制造这种杯式挺杆的方法。该杯式挺杆具有挺杆壳体(2、2’),该挺杆壳体带有中空柱体形的杯裙(3、3’)和单侧地封闭该杯裙的杯底部(4、4’),杯裙借助钢坯件的非切削式冷变型模制在杯底部上。杯底部的外侧面充当用于内燃机的凸轮(6)的接触面(5、5’),该凸轮向杯式挺杆施加冲程荷载,并且杯裙的外侧面充当用于内燃机的引导孔(9)的接触面(8、8’),该引导孔在冲程方向上支承杯式挺杆。在此,挺杆壳体的外侧面仅在杯裙的外侧面处应该进行切削式加工。
用于制造滑动挺杆的方法.pdf
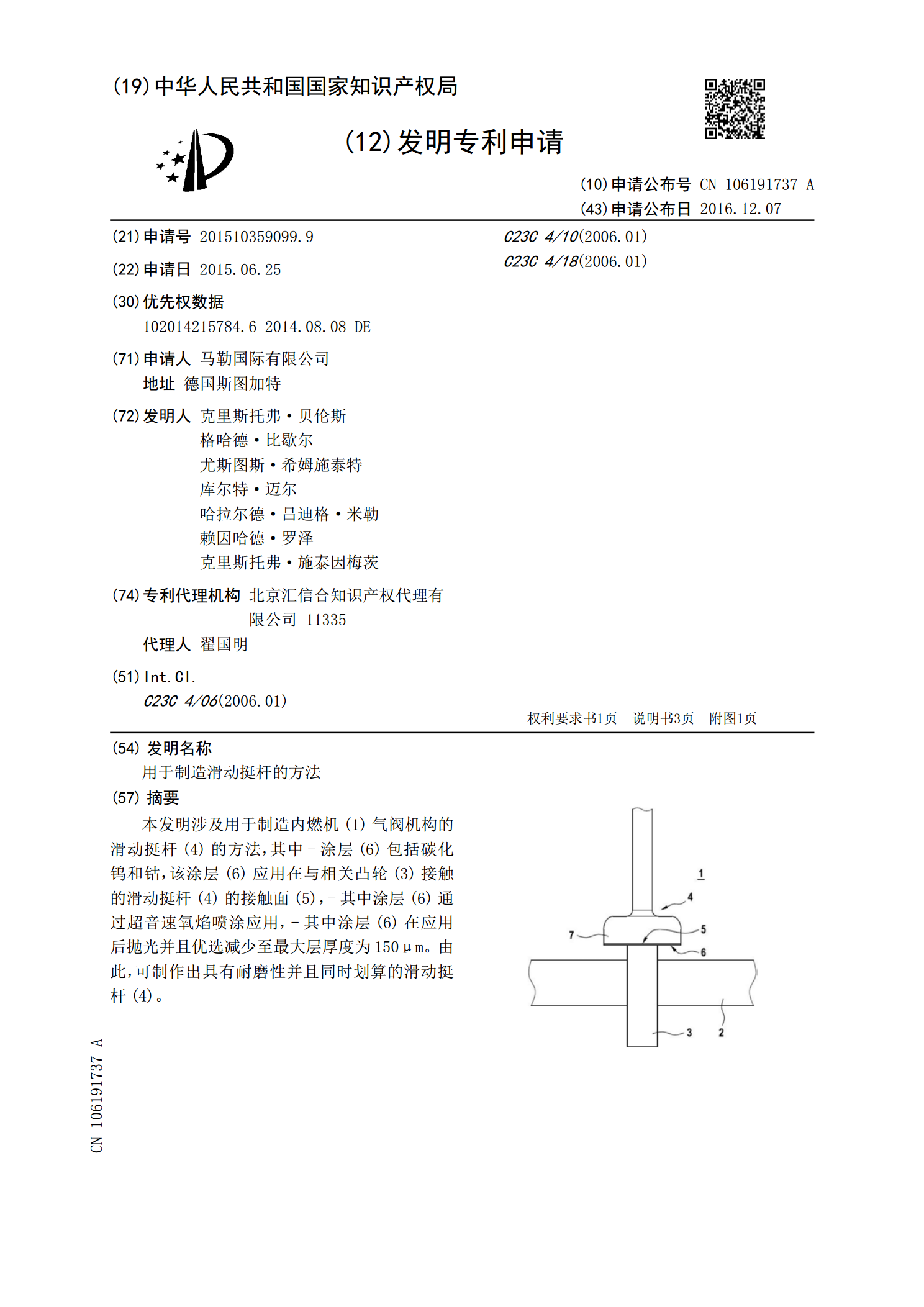
本发明涉及用于制造内燃机(1)气阀机构的滑动挺杆(4)的方法,其中-涂层(6)包括碳化钨和钴,该涂层(6)应用在与相关凸轮(3)接触的滑动挺杆(4)的接触面(5),-其中涂层(6)通过超音速氧焰喷涂应用,-其中涂层(6)在应用后抛光并且优选减少至最大层厚度为150μm。由此,可制作出具有耐磨性并且同时划算的滑动挺杆(4)。