
预测障碍物的运动轨迹的方法、装置及自动驾驶车辆.pdf

波峻****99

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
预测障碍物的运动轨迹的方法、装置及自动驾驶车辆.pdf
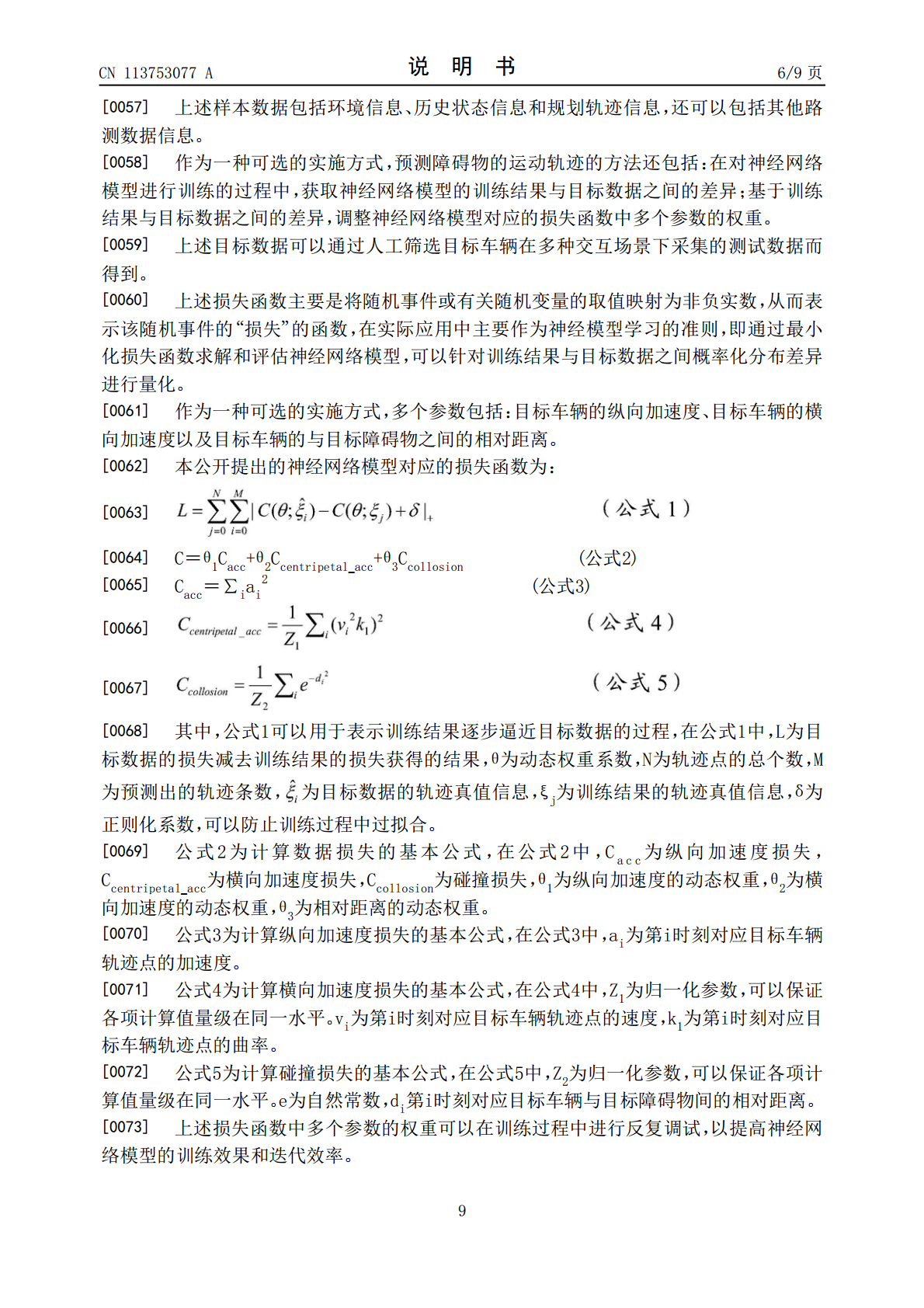
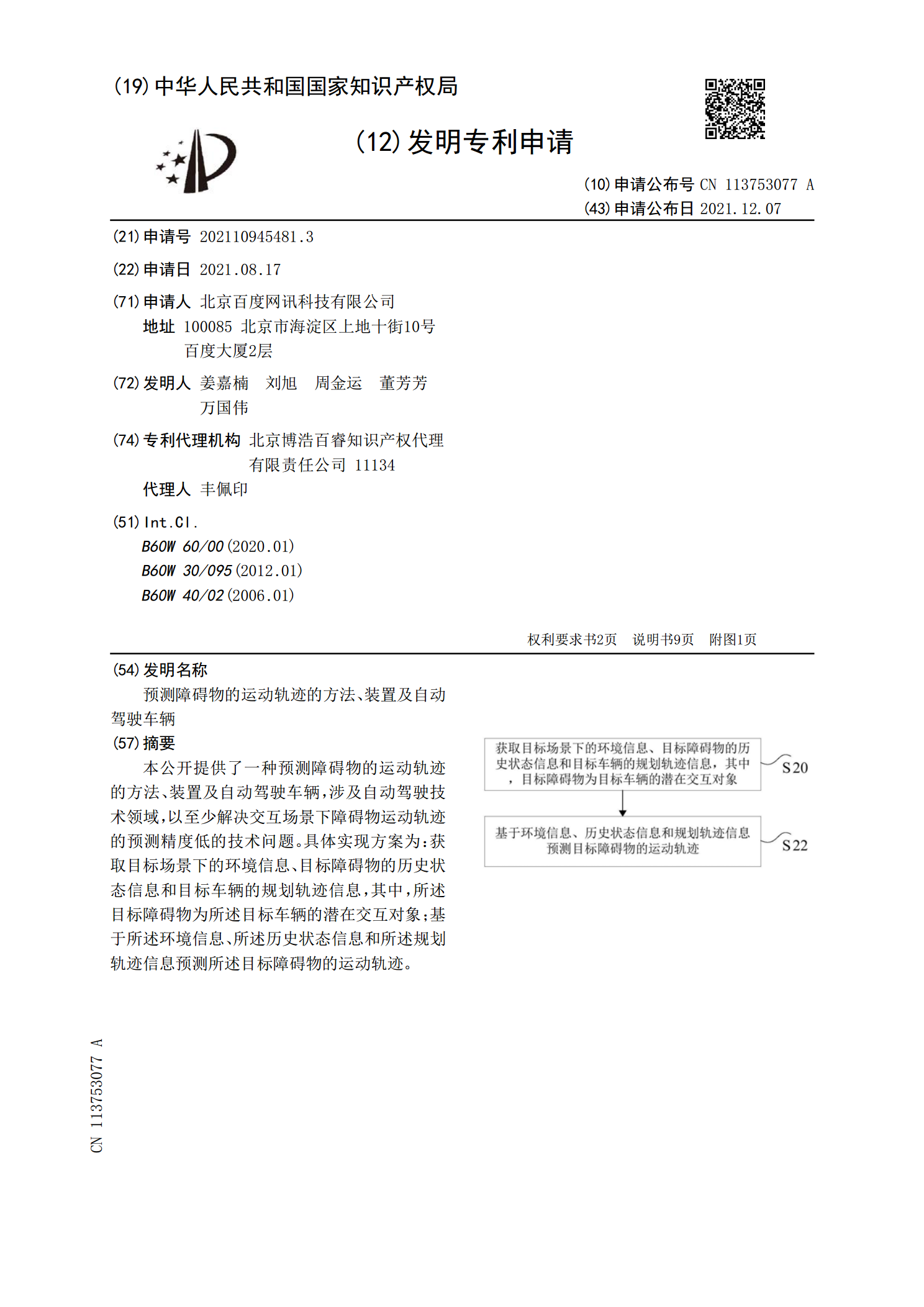
本公开提供了一种预测障碍物的运动轨迹的方法、装置及自动驾驶车辆,涉及自动驾驶技术领域,以至少解决交互场景下障碍物运动轨迹的预测精度低的技术问题。具体实现方案为:获取目标场景下的环境信息、目标障碍物的历史状态信息和目标车辆的规划轨迹信息,其中,所述目标障碍物为所述目标车辆的潜在交互对象;基于所述环境信息、所述历史状态信息和所述规划轨迹信息预测所述目标障碍物的运动轨迹。
自动驾驶车辆的障碍物轨迹预测方法、装置和电子设备.pdf
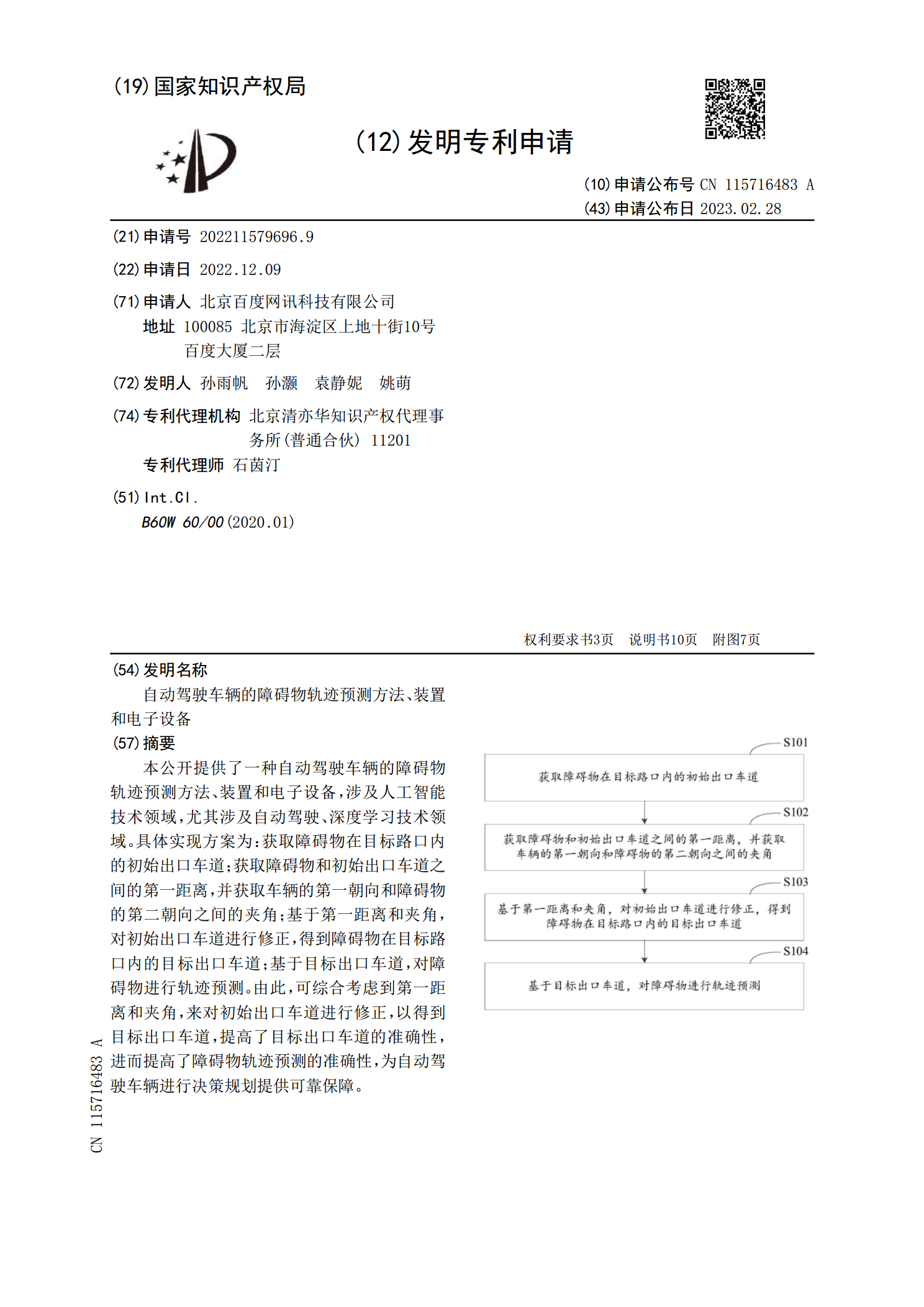
本公开提供了一种自动驾驶车辆的障碍物轨迹预测方法、装置和电子设备,涉及人工智能技术领域,尤其涉及自动驾驶、深度学习技术领域。具体实现方案为:获取障碍物在目标路口内的初始出口车道;获取障碍物和初始出口车道之间的第一距离,并获取车辆的第一朝向和障碍物的第二朝向之间的夹角;基于第一距离和夹角,对初始出口车道进行修正,得到障碍物在目标路口内的目标出口车道;基于目标出口车道,对障碍物进行轨迹预测。由此,可综合考虑到第一距离和夹角,来对初始出口车道进行修正,以得到目标出口车道,提高了目标出口车道的准确性,进而提高了障
基于V2X的车辆轨迹预测方法、装置、设备及自动驾驶车辆.pdf
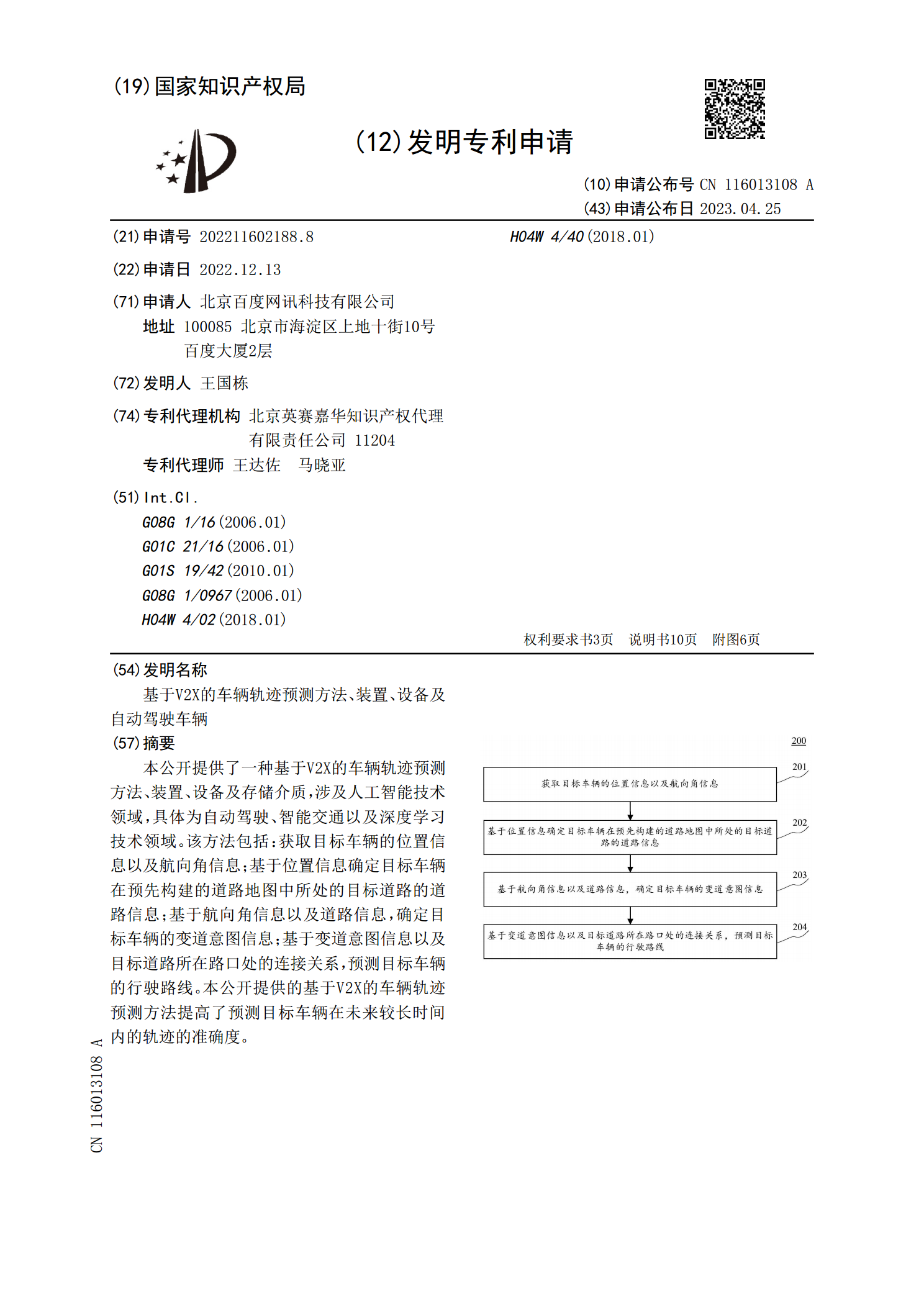
本公开提供了一种基于V2X的车辆轨迹预测方法、装置、设备及存储介质,涉及人工智能技术领域,具体为自动驾驶、智能交通以及深度学习技术领域。该方法包括:获取目标车辆的位置信息以及航向角信息;基于位置信息确定目标车辆在预先构建的道路地图中所处的目标道路的道路信息;基于航向角信息以及道路信息,确定目标车辆的变道意图信息;基于变道意图信息以及目标道路所在路口处的连接关系,预测目标车辆的行驶路线。本公开提供的基于V2X的车辆轨迹预测方法提高了预测目标车辆在未来较长时间内的轨迹的准确度。
自动驾驶车辆的障碍物检测方法、装置、设备及介质.pdf
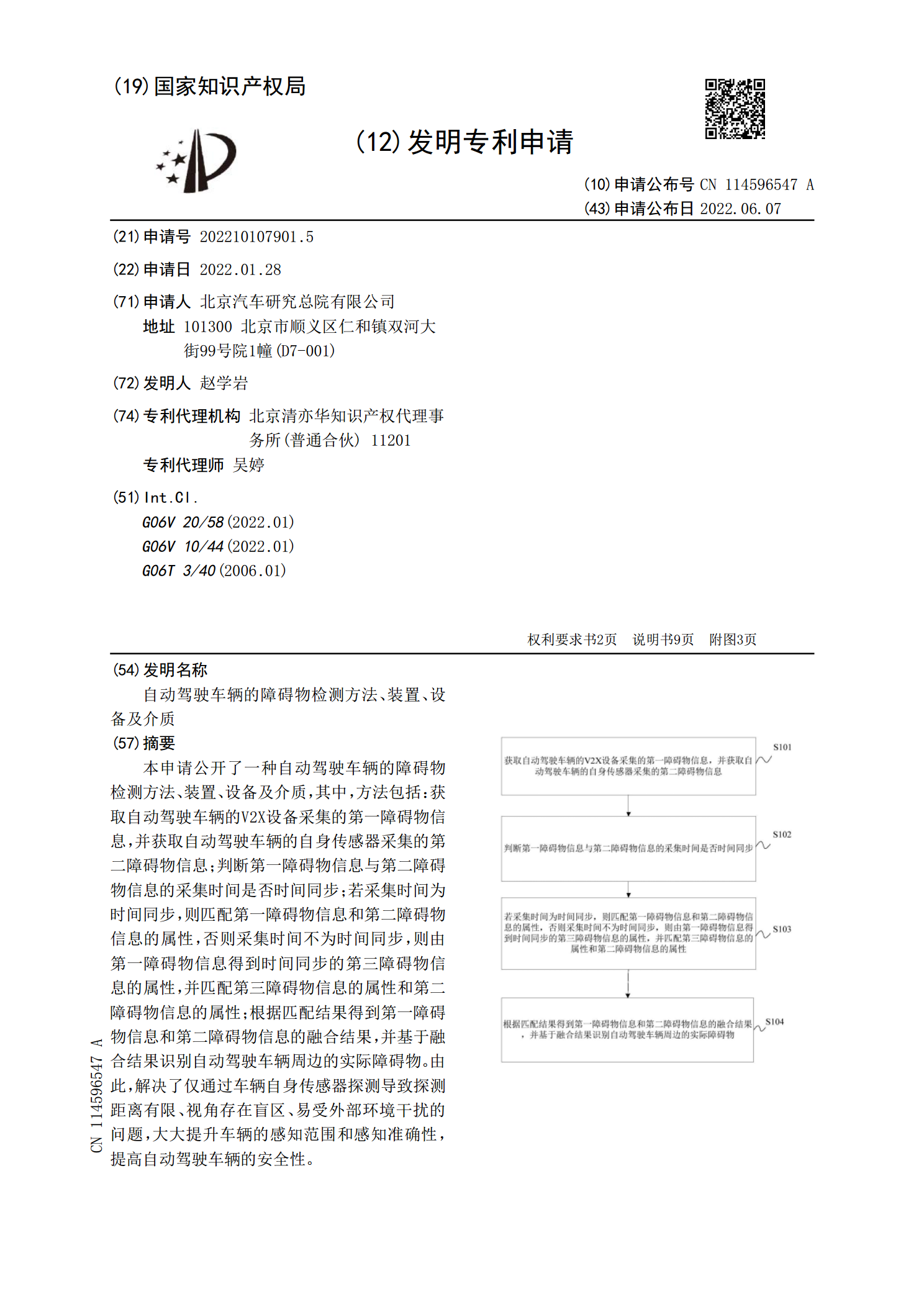
本申请公开了一种自动驾驶车辆的障碍物检测方法、装置、设备及介质,其中,方法包括:获取自动驾驶车辆的V2X设备采集的第一障碍物信息,并获取自动驾驶车辆的自身传感器采集的第二障碍物信息;判断第一障碍物信息与第二障碍物信息的采集时间是否时间同步;若采集时间为时间同步,则匹配第一障碍物信息和第二障碍物信息的属性,否则采集时间不为时间同步,则由第一障碍物信息得到时间同步的第三障碍物信息的属性,并匹配第三障碍物信息的属性和第二障碍物信息的属性;根据匹配结果得到第一障碍物信息和第二障碍物信息的融合结果,并基于融合结果识
一种自动驾驶车辆轨迹预测方法、装置及电子设备.pdf
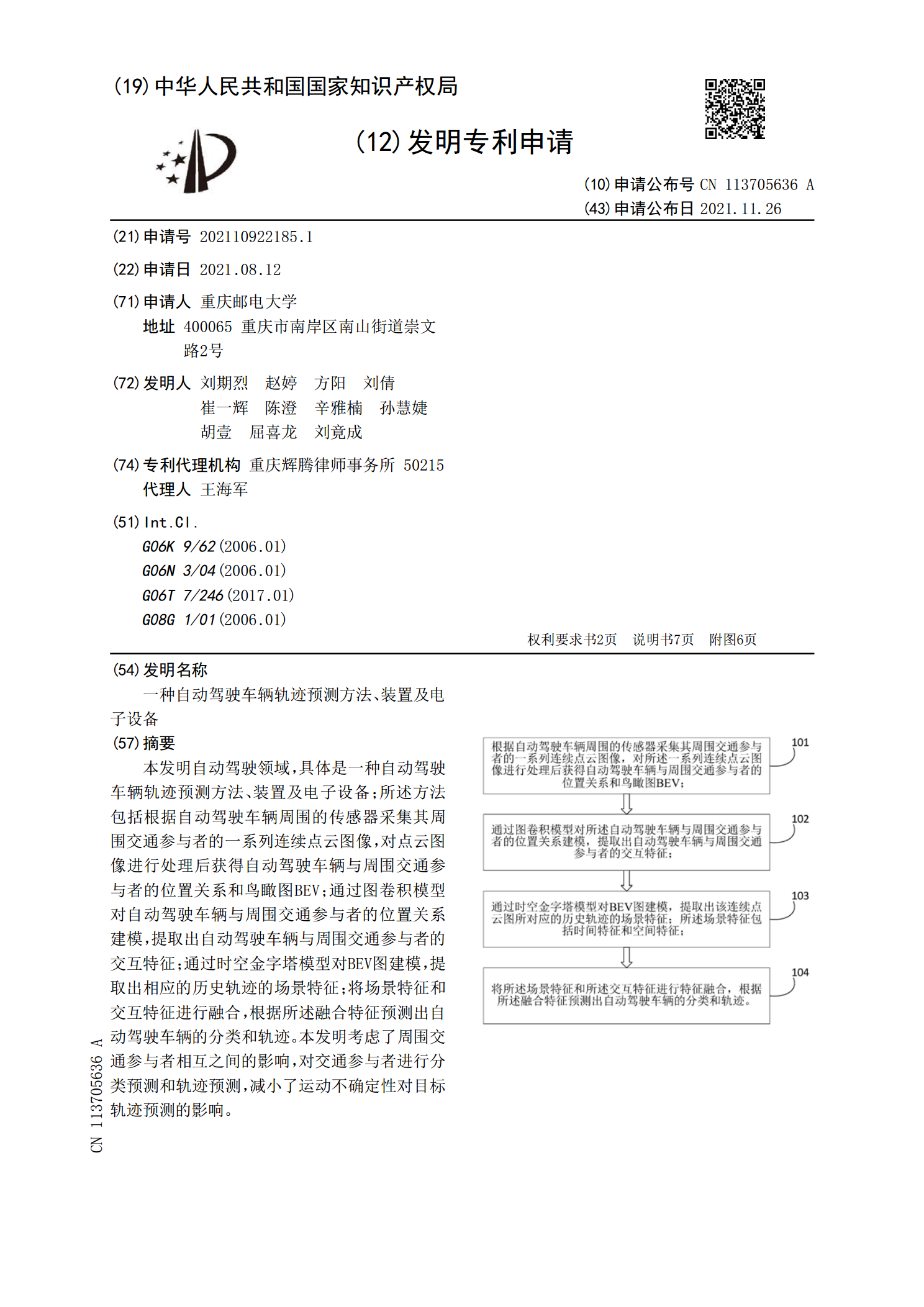
本发明自动驾驶领域,具体是一种自动驾驶车辆轨迹预测方法、装置及电子设备;所述方法包括根据自动驾驶车辆周围的传感器采集其周围交通参与者的一系列连续点云图像,对点云图像进行处理后获得自动驾驶车辆与周围交通参与者的位置关系和鸟瞰图BEV;通过图卷积模型对自动驾驶车辆与周围交通参与者的位置关系建模,提取出自动驾驶车辆与周围交通参与者的交互特征;通过时空金字塔模型对BEV图建模,提取出相应的历史轨迹的场景特征;将场景特征和交互特征进行融合,根据所述融合特征预测出自动驾驶车辆的分类和轨迹。本发明考虑了周围交通参与者相