
基于双目视觉伺服的空间高精度装配方法和系统.pdf

白凡****12

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目视觉伺服的空间高精度装配方法和系统.pdf
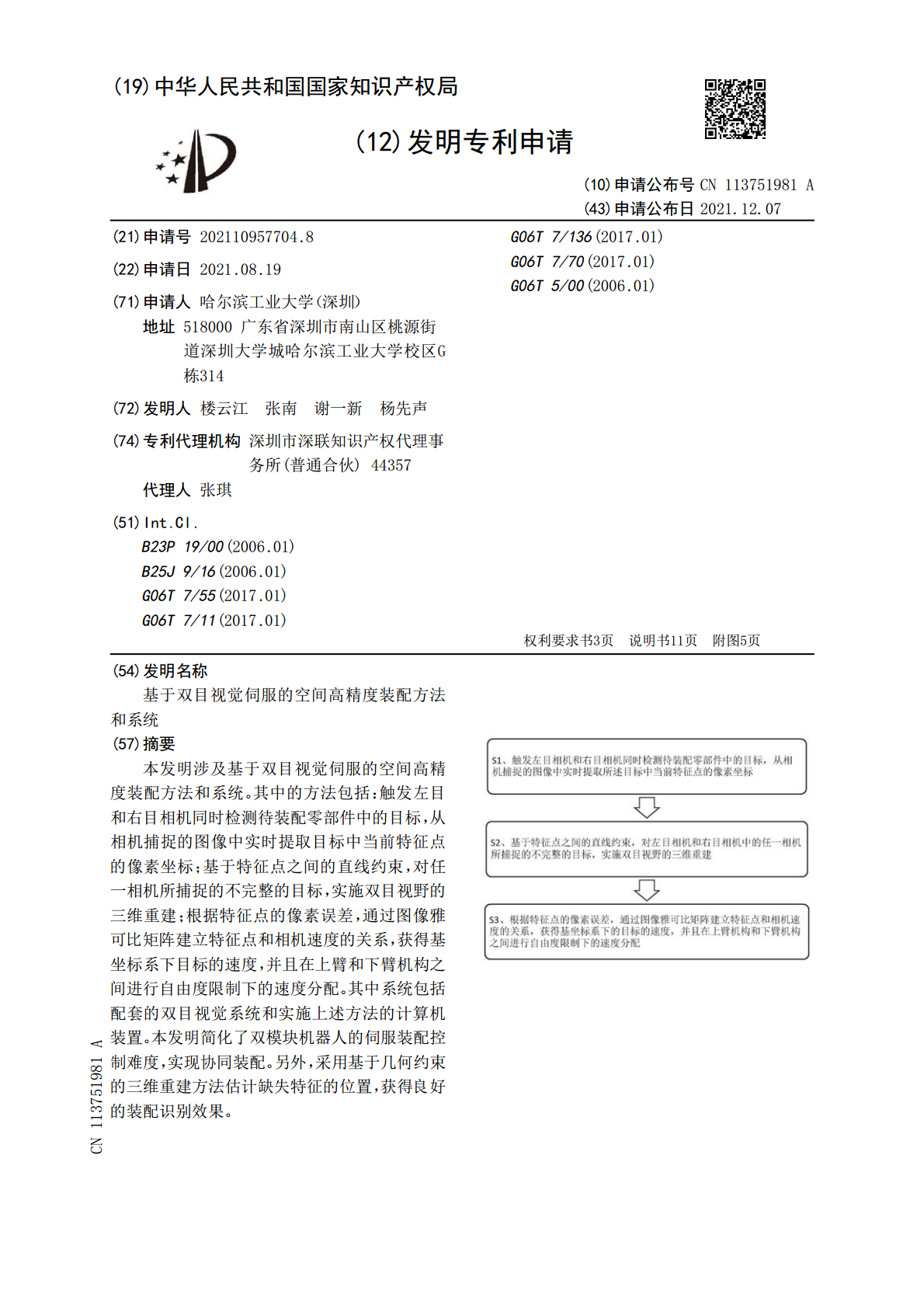
本发明涉及基于双目视觉伺服的空间高精度装配方法和系统。其中的方法包括:触发左目和右目相机同时检测待装配零部件中的目标,从相机捕捉的图像中实时提取目标中当前特征点的像素坐标;基于特征点之间的直线约束,对任一相机所捕捉的不完整的目标,实施双目视野的三维重建;根据特征点的像素误差,通过图像雅可比矩阵建立特征点和相机速度的关系,获得基坐标系下目标的速度,并且在上臂和下臂机构之间进行自由度限制下的速度分配。其中系统包括配套的双目视觉系统和实施上述方法的计算机装置。本发明简化了双模块机器人的伺服装配控制难度,实现协同
一种基于双目视差计算的木工家具高精度装配系统及方法.pdf
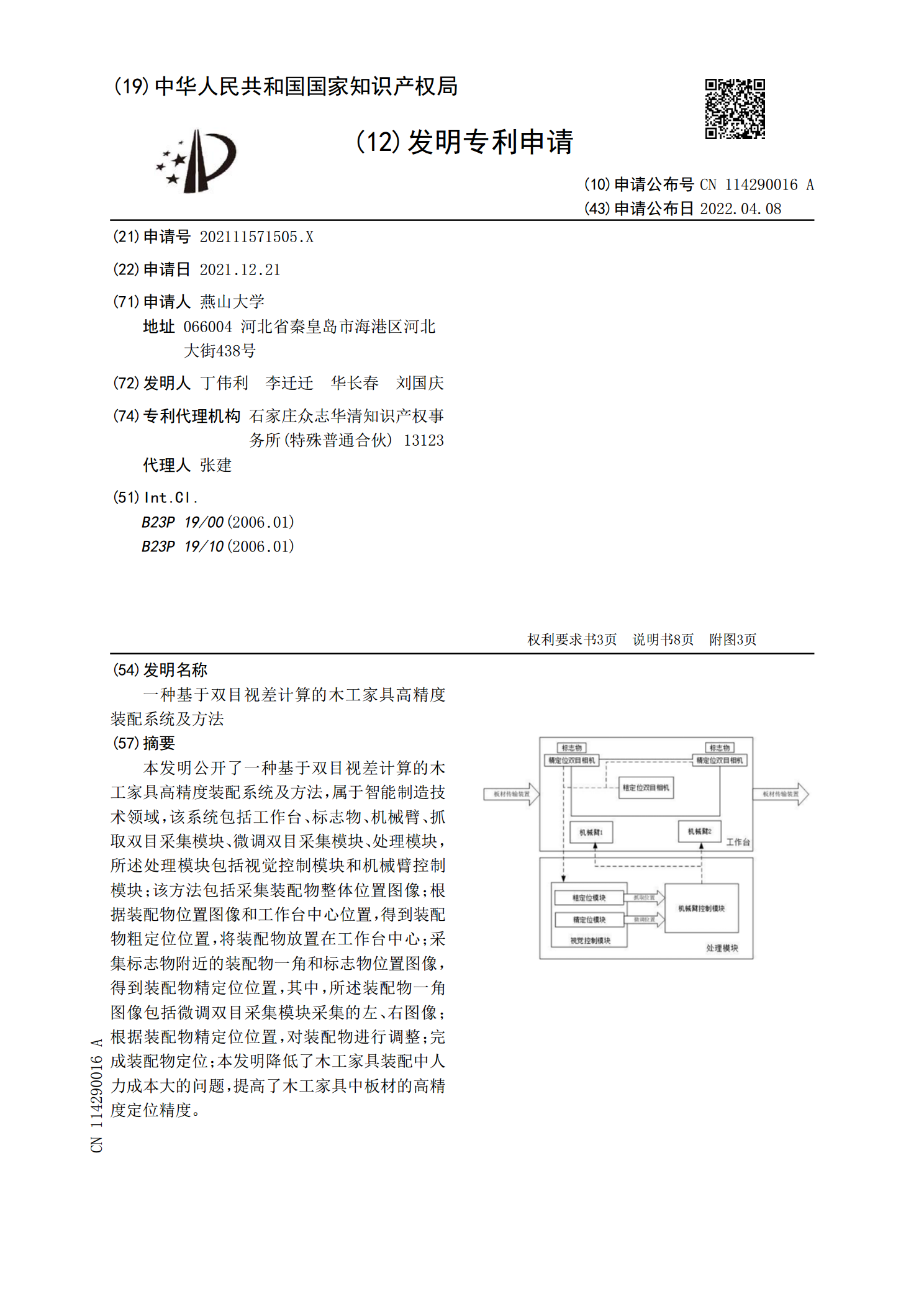
本发明公开了一种基于双目视差计算的木工家具高精度装配系统及方法,属于智能制造技术领域,该系统包括工作台、标志物、机械臂、抓取双目采集模块、微调双目采集模块、处理模块,所述处理模块包括视觉控制模块和机械臂控制模块;该方法包括采集装配物整体位置图像;根据装配物位置图像和工作台中心位置,得到装配物粗定位位置,将装配物放置在工作台中心;采集标志物附近的装配物一角和标志物位置图像,得到装配物精定位位置,其中,所述装配物一角图像包括微调双目采集模块采集的左、右图像;根据装配物精定位位置,对装配物进行调整;完成装配物定
基于双目视觉的无人机编队飞行方法和系统.pdf
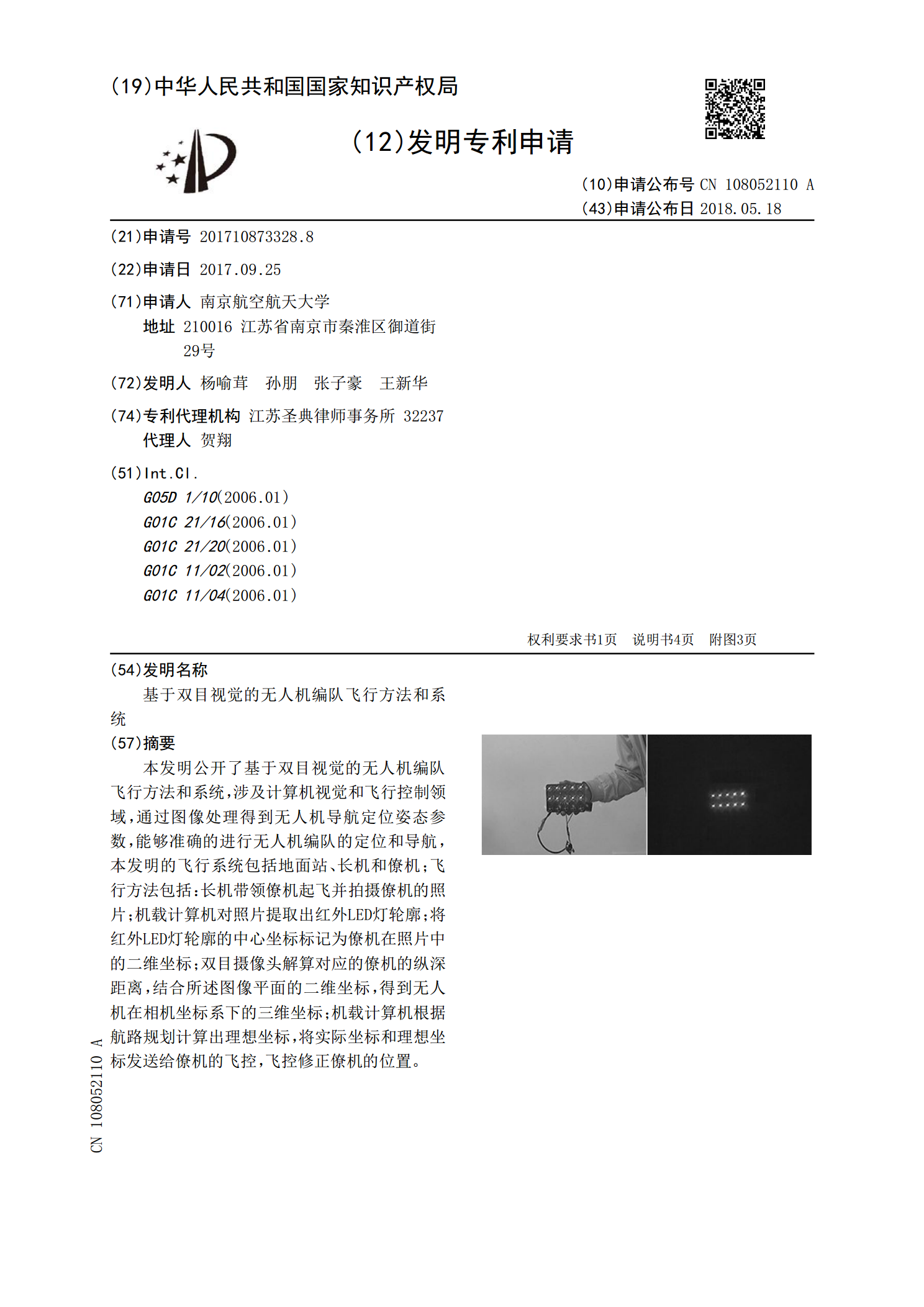
本发明公开了基于双目视觉的无人机编队飞行方法和系统,涉及计算机视觉和飞行控制领域,通过图像处理得到无人机导航定位姿态参数,能够准确的进行无人机编队的定位和导航,本发明的飞行系统包括地面站、长机和僚机;飞行方法包括:长机带领僚机起飞并拍摄僚机的照片;机载计算机对照片提取出红外LED灯轮廓;将红外LED灯轮廓的中心坐标标记为僚机在照片中的二维坐标;双目摄像头解算对应的僚机的纵深距离,结合所述图像平面的二维坐标,得到无人机在相机坐标系下的三维坐标;机载计算机根据航路规划计算出理想坐标,将实际坐标和理想坐标发送给
基于背景建模和双目视觉的车辆限高方法及系统.pdf
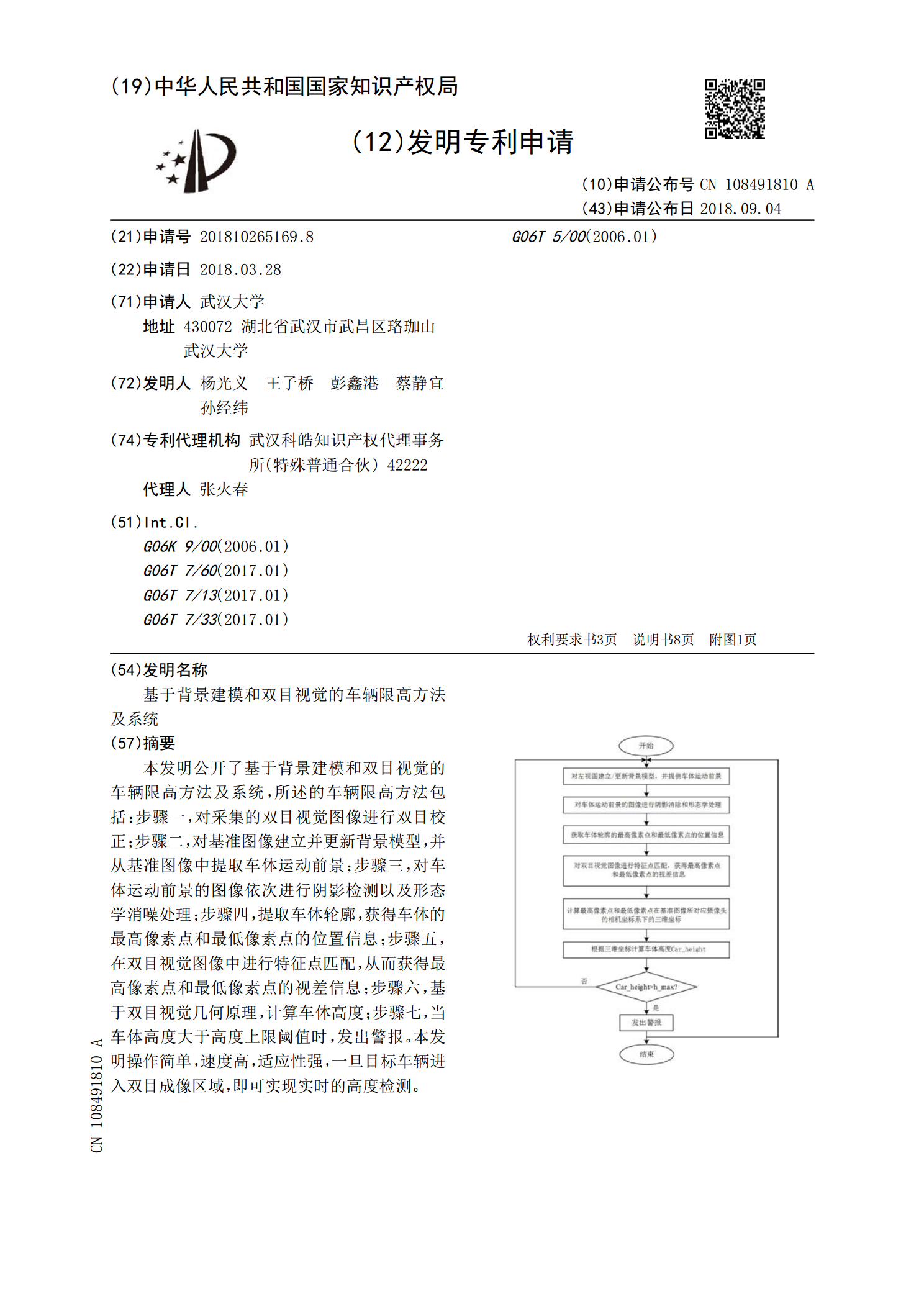
本发明公开了基于背景建模和双目视觉的车辆限高方法及系统,所述的车辆限高方法包括:步骤一,对采集的双目视觉图像进行双目校正;步骤二,对基准图像建立并更新背景模型,并从基准图像中提取车体运动前景;步骤三,对车体运动前景的图像依次进行阴影检测以及形态学消噪处理;步骤四,提取车体轮廓,获得车体的最高像素点和最低像素点的位置信息;步骤五,在双目视觉图像中进行特征点匹配,从而获得最高像素点和最低像素点的视差信息;步骤六,基于双目视觉几何原理,计算车体高度;步骤七,当车体高度大于高度上限阈值时,发出警报。本发明操作简单
基于双目视觉系统的果实定位方法和装置.pdf
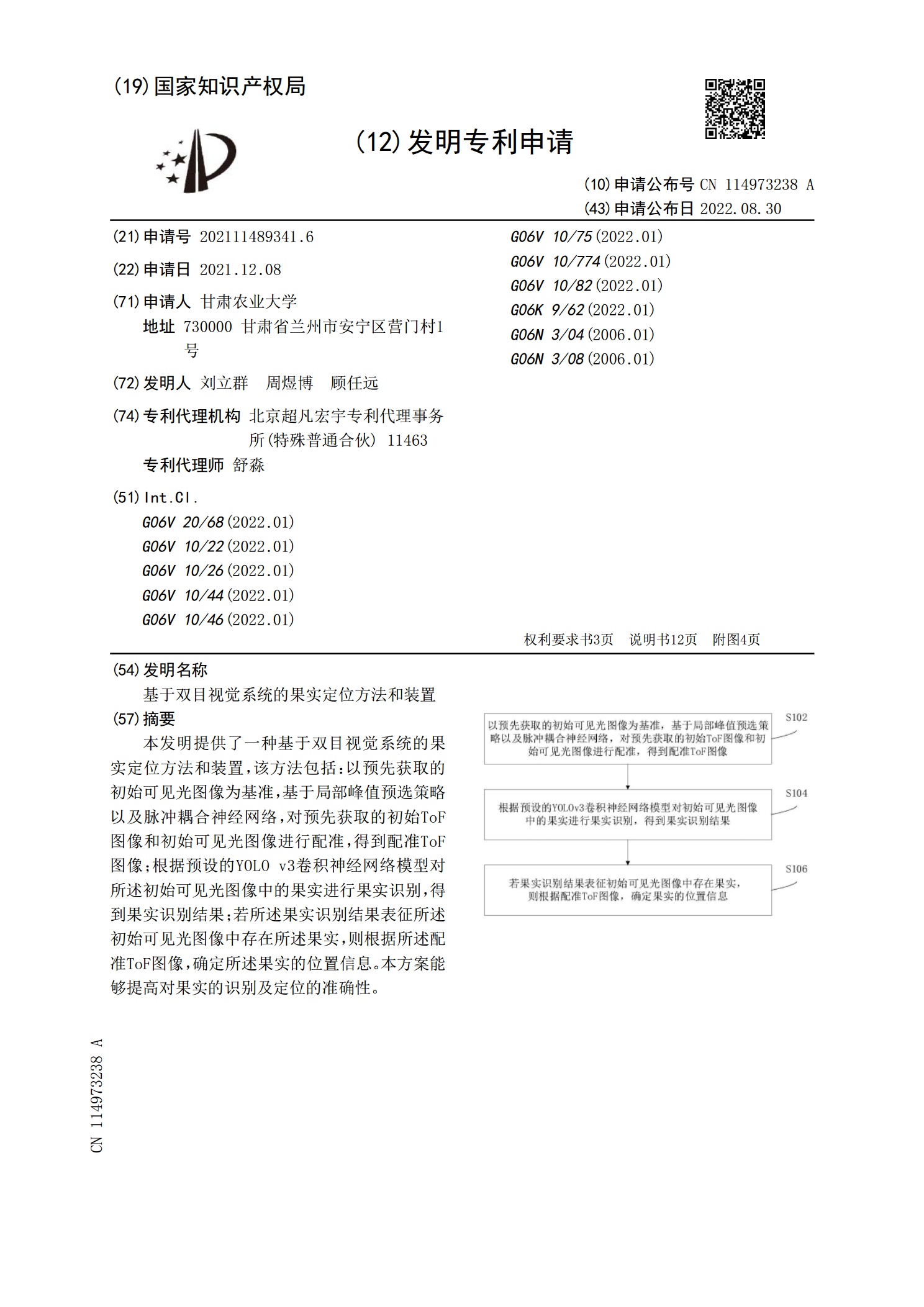
本发明提供了一种基于双目视觉系统的果实定位方法和装置,该方法包括:以预先获取的初始可见光图像为基准,基于局部峰值预选策略以及脉冲耦合神经网络,对预先获取的初始ToF图像和初始可见光图像进行配准,得到配准ToF图像;根据预设的YOLOv3卷积神经网络模型对所述初始可见光图像中的果实进行果实识别,得到果实识别结果;若所述果实识别结果表征所述初始可见光图像中存在所述果实,则根据所述配准ToF图像,确定所述果实的位置信息。本方案能够提高对果实的识别及定位的准确性。