
一种基于双目视差计算的木工家具高精度装配系统及方法.pdf

书生****写意

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双目视差计算的木工家具高精度装配系统及方法.pdf
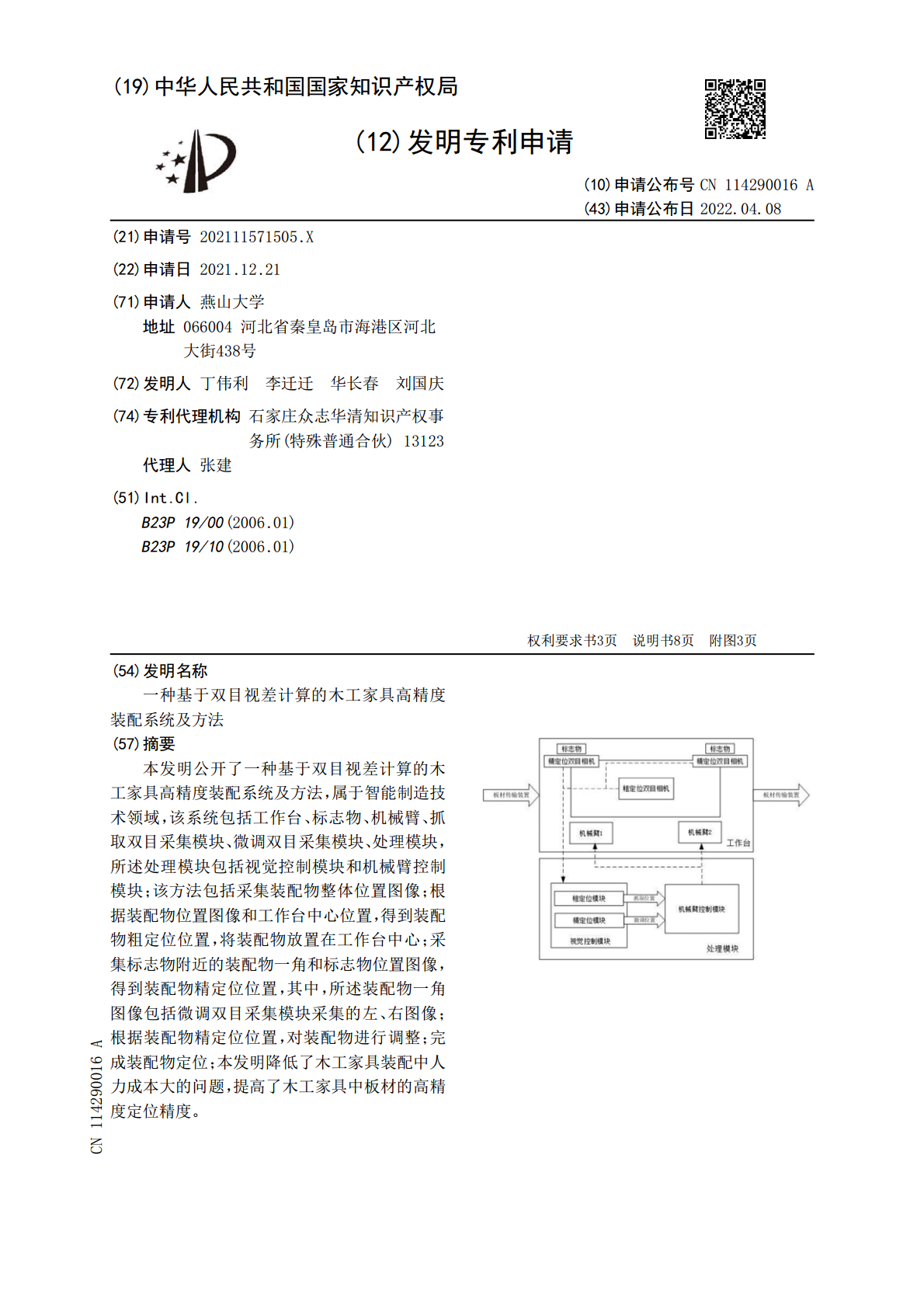
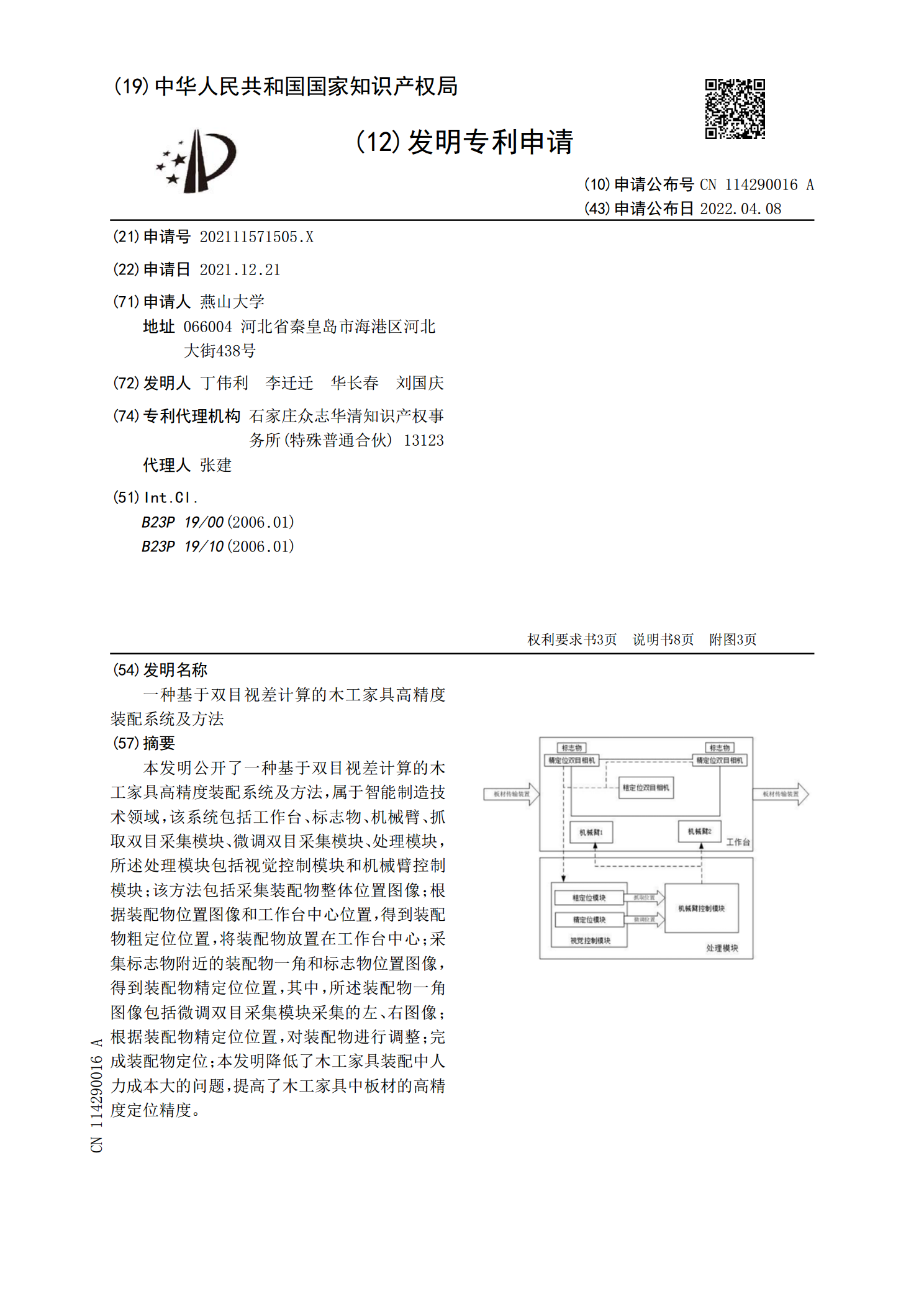
本发明公开了一种基于双目视差计算的木工家具高精度装配系统及方法,属于智能制造技术领域,该系统包括工作台、标志物、机械臂、抓取双目采集模块、微调双目采集模块、处理模块,所述处理模块包括视觉控制模块和机械臂控制模块;该方法包括采集装配物整体位置图像;根据装配物位置图像和工作台中心位置,得到装配物粗定位位置,将装配物放置在工作台中心;采集标志物附近的装配物一角和标志物位置图像,得到装配物精定位位置,其中,所述装配物一角图像包括微调双目采集模块采集的左、右图像;根据装配物精定位位置,对装配物进行调整;完成装配物定
基于双目视觉伺服的空间高精度装配方法和系统.pdf
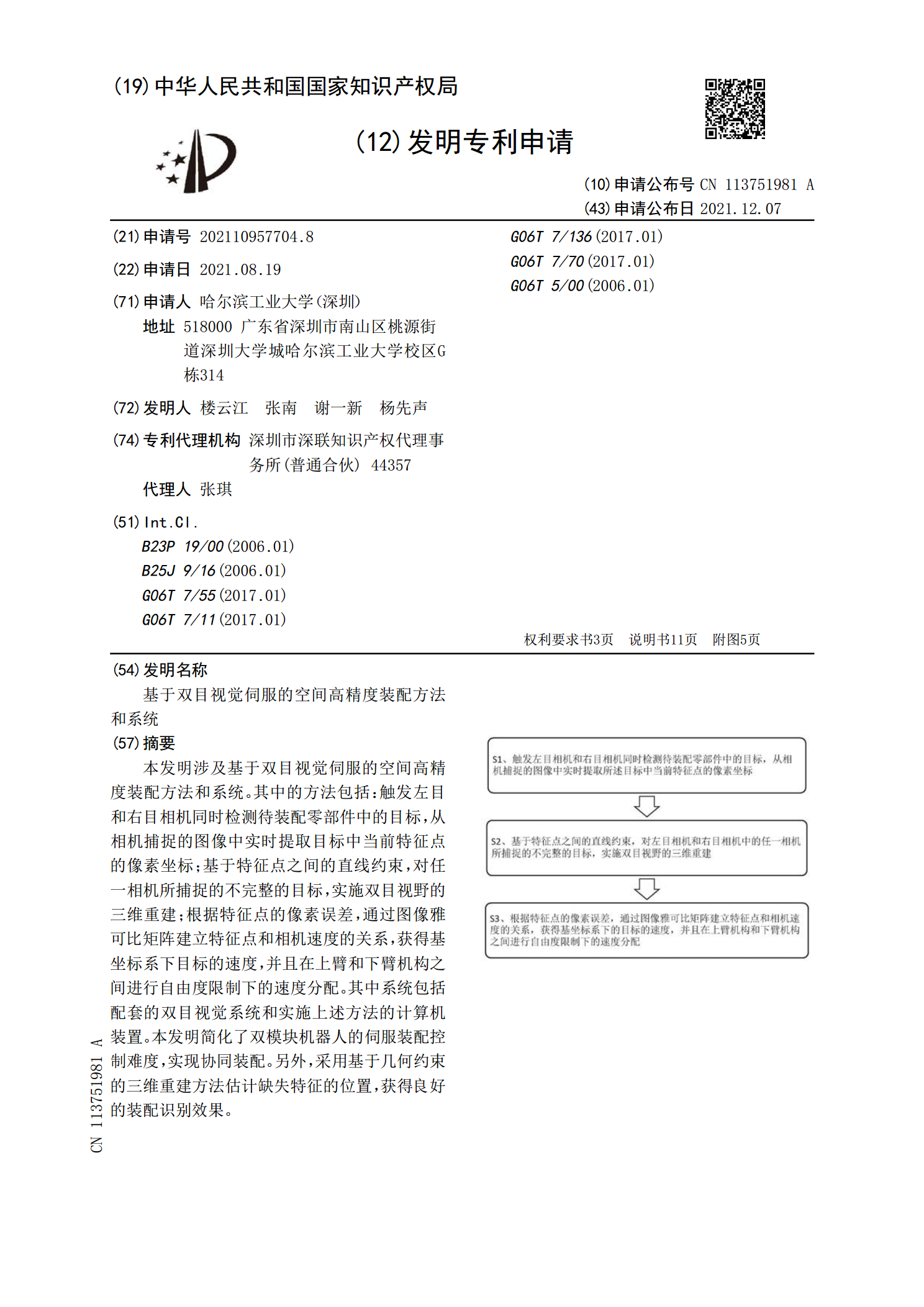
本发明涉及基于双目视觉伺服的空间高精度装配方法和系统。其中的方法包括:触发左目和右目相机同时检测待装配零部件中的目标,从相机捕捉的图像中实时提取目标中当前特征点的像素坐标;基于特征点之间的直线约束,对任一相机所捕捉的不完整的目标,实施双目视野的三维重建;根据特征点的像素误差,通过图像雅可比矩阵建立特征点和相机速度的关系,获得基坐标系下目标的速度,并且在上臂和下臂机构之间进行自由度限制下的速度分配。其中系统包括配套的双目视觉系统和实施上述方法的计算机装置。本发明简化了双模块机器人的伺服装配控制难度,实现协同
一种视差面精细建模的双目图像视差计算优化方法.pdf
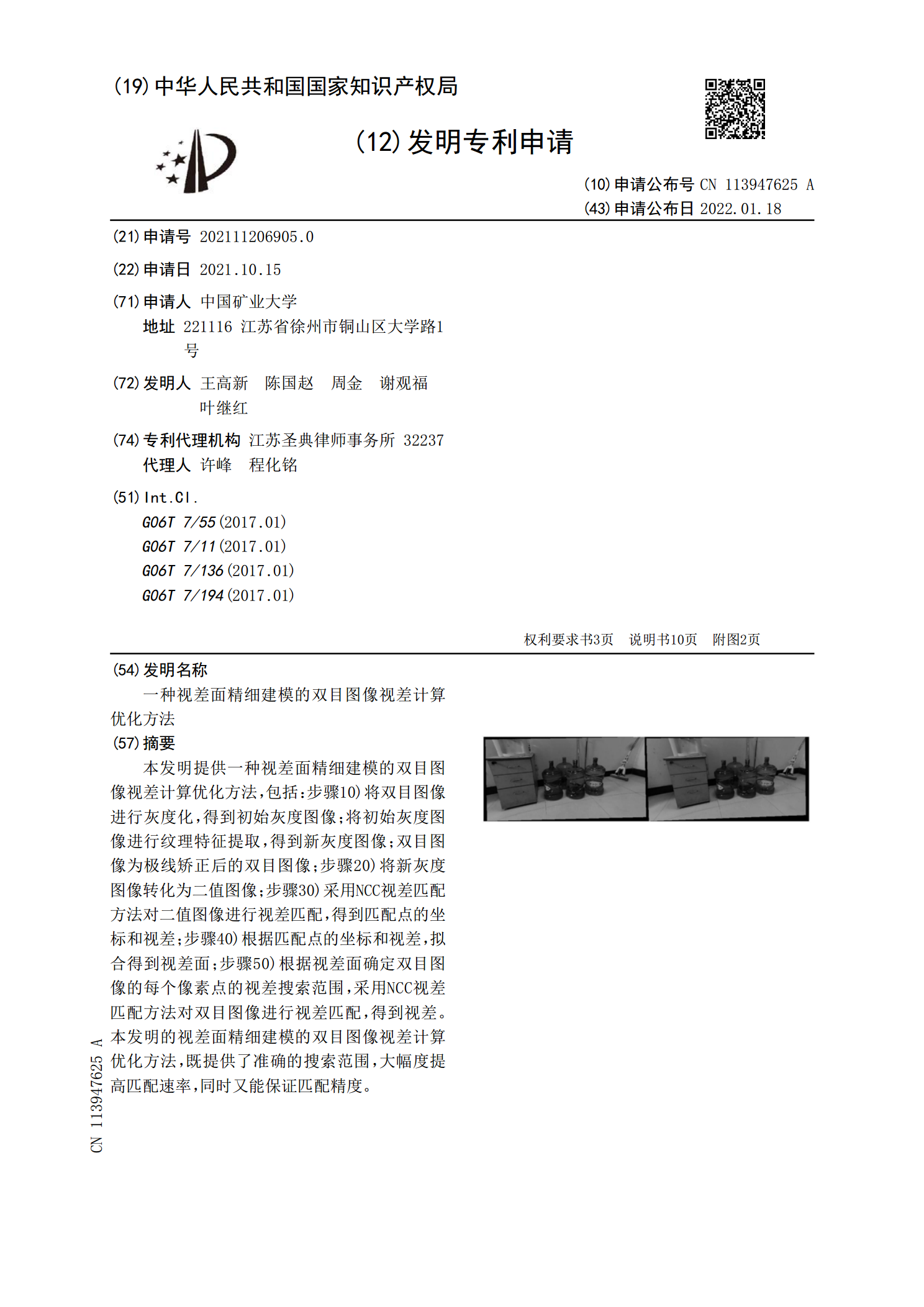
本发明提供一种视差面精细建模的双目图像视差计算优化方法,包括:步骤10)将双目图像进行灰度化,得到初始灰度图像;将初始灰度图像进行纹理特征提取,得到新灰度图像;双目图像为极线矫正后的双目图像;步骤20)将新灰度图像转化为二值图像;步骤30)采用NCC视差匹配方法对二值图像进行视差匹配,得到匹配点的坐标和视差;步骤40)根据匹配点的坐标和视差,拟合得到视差面;步骤50)根据视差面确定双目图像的每个像素点的视差搜索范围,采用NCC视差匹配方法对双目图像进行视差匹配,得到视差。本发明的视差面精细建模的双目图像视
虚拟主动视差计算补偿的双目渲染方法及系统.pdf
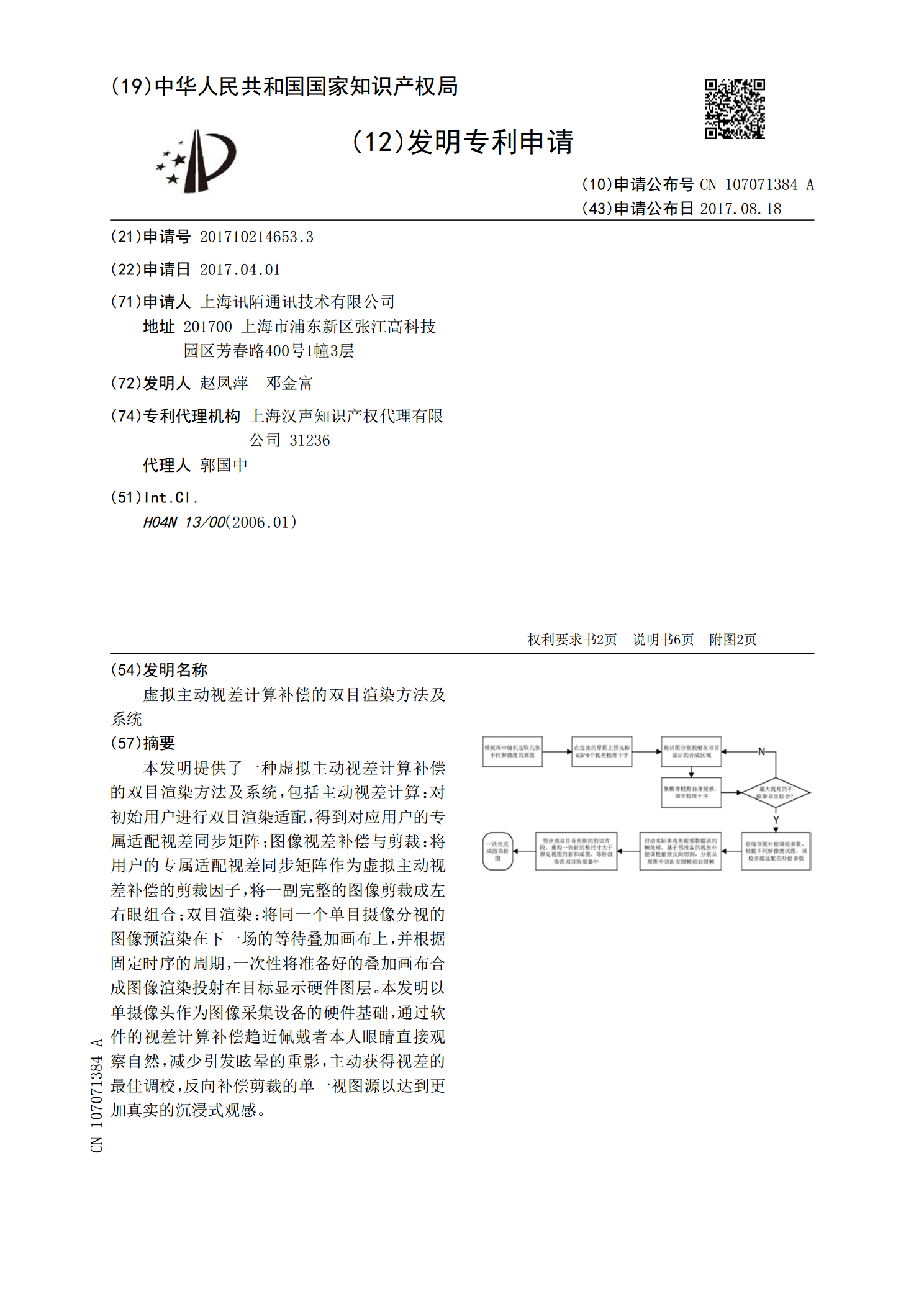
本发明提供了一种虚拟主动视差计算补偿的双目渲染方法及系统,包括主动视差计算:对初始用户进行双目渲染适配,得到对应用户的专属适配视差同步矩阵;图像视差补偿与剪裁:将用户的专属适配视差同步矩阵作为虚拟主动视差补偿的剪裁因子,将一副完整的图像剪裁成左右眼组合;双目渲染:将同一个单目摄像分视的图像预渲染在下一场的等待叠加画布上,并根据固定时序的周期,一次性将准备好的叠加画布合成图像渲染投射在目标显示硬件图层。本发明以单摄像头作为图像采集设备的硬件基础,通过软件的视差计算补偿趋近佩戴者本人眼睛直接观察自然,减少引发
一种双目视差计算方法及装置.pdf
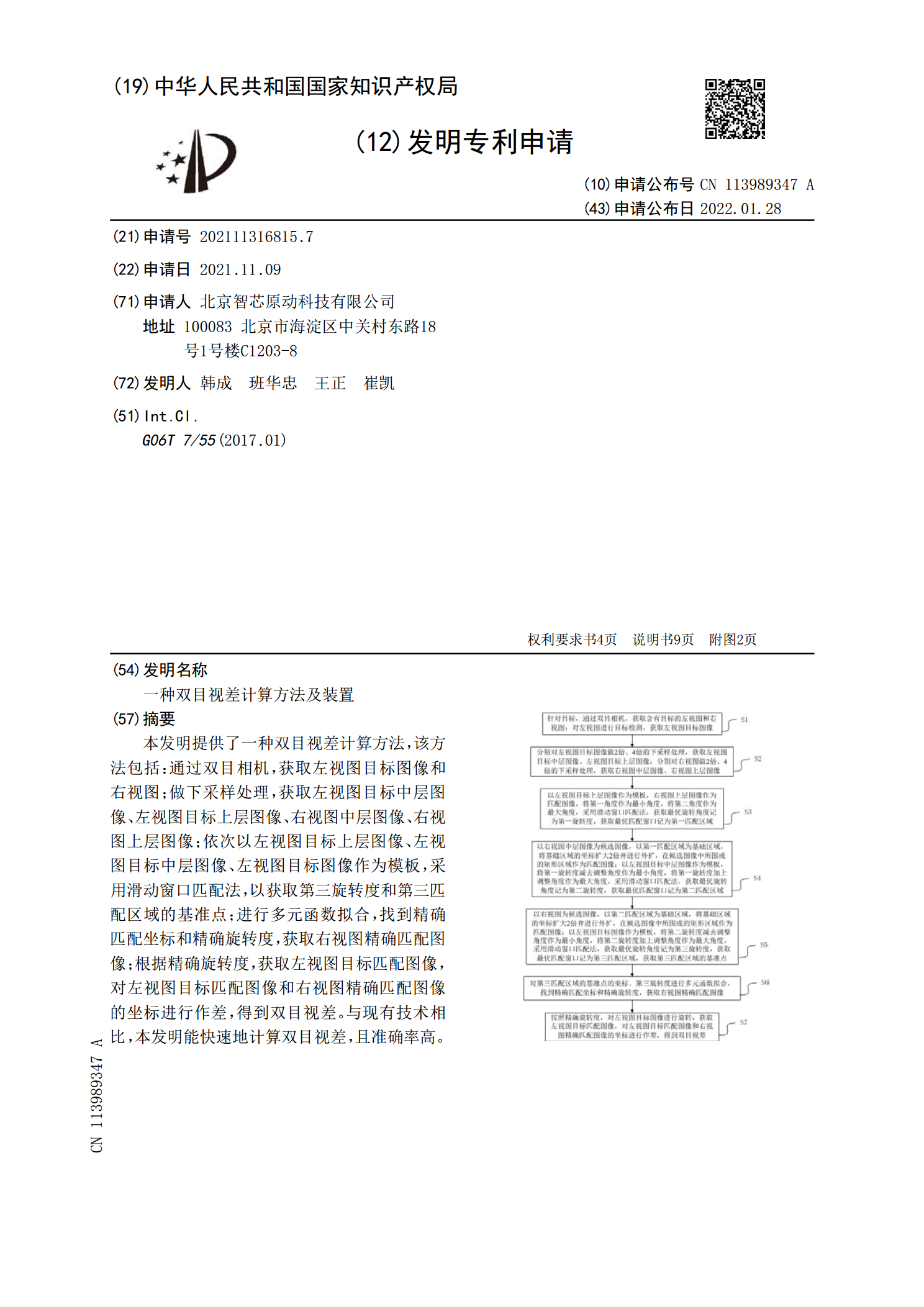
本发明提供了一种双目视差计算方法,该方法包括:通过双目相机,获取左视图目标图像和右视图;做下采样处理,获取左视图目标中层图像、左视图目标上层图像、右视图中层图像、右视图上层图像;依次以左视图目标上层图像、左视图目标中层图像、左视图目标图像作为模板,采用滑动窗口匹配法,以获取第三旋转度和第三匹配区域的基准点;进行多元函数拟合,找到精确匹配坐标和精确旋转度,获取右视图精确匹配图像;根据精确旋转度,获取左视图目标匹配图像,对左视图目标匹配图像和右视图精确匹配图像的坐标进行作差,得到双目视差。与现有技术相比,本发