
基于背景建模和双目视觉的车辆限高方法及系统.pdf

Ch****91

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于背景建模和双目视觉的车辆限高方法及系统.pdf
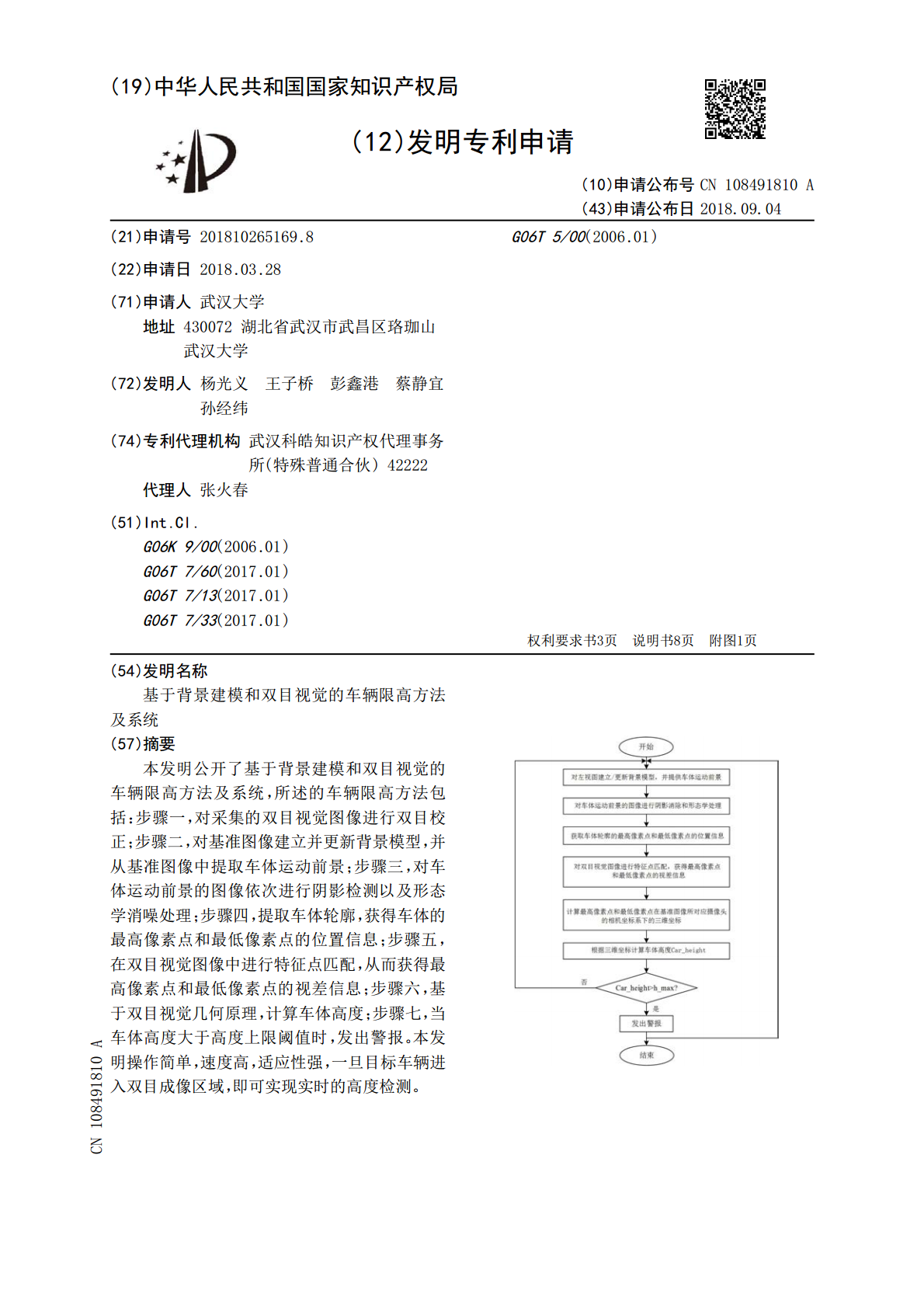
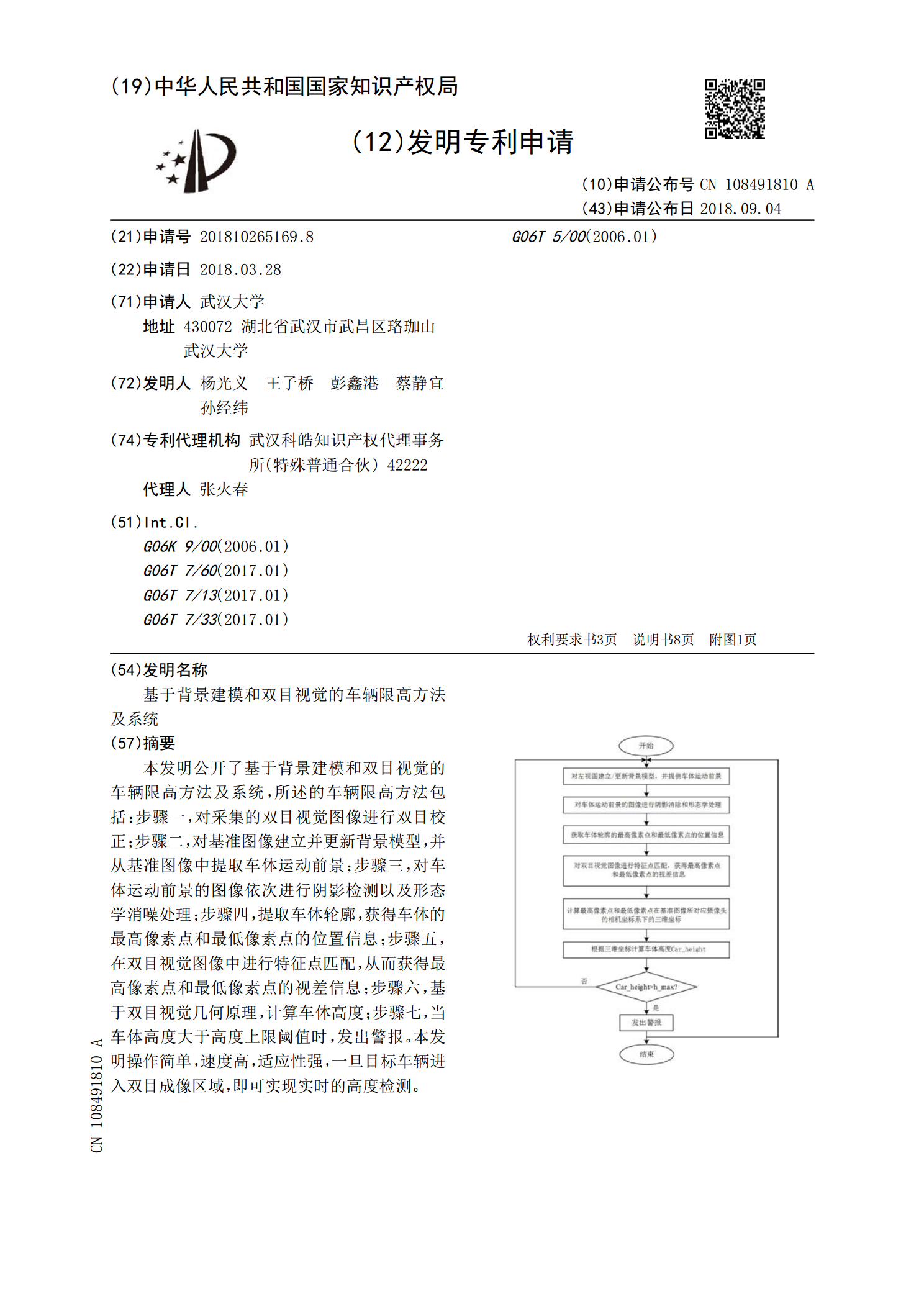
本发明公开了基于背景建模和双目视觉的车辆限高方法及系统,所述的车辆限高方法包括:步骤一,对采集的双目视觉图像进行双目校正;步骤二,对基准图像建立并更新背景模型,并从基准图像中提取车体运动前景;步骤三,对车体运动前景的图像依次进行阴影检测以及形态学消噪处理;步骤四,提取车体轮廓,获得车体的最高像素点和最低像素点的位置信息;步骤五,在双目视觉图像中进行特征点匹配,从而获得最高像素点和最低像素点的视差信息;步骤六,基于双目视觉几何原理,计算车体高度;步骤七,当车体高度大于高度上限阈值时,发出警报。本发明操作简单
一种基于背景建模和双目视觉的人体身高测量方法.pdf
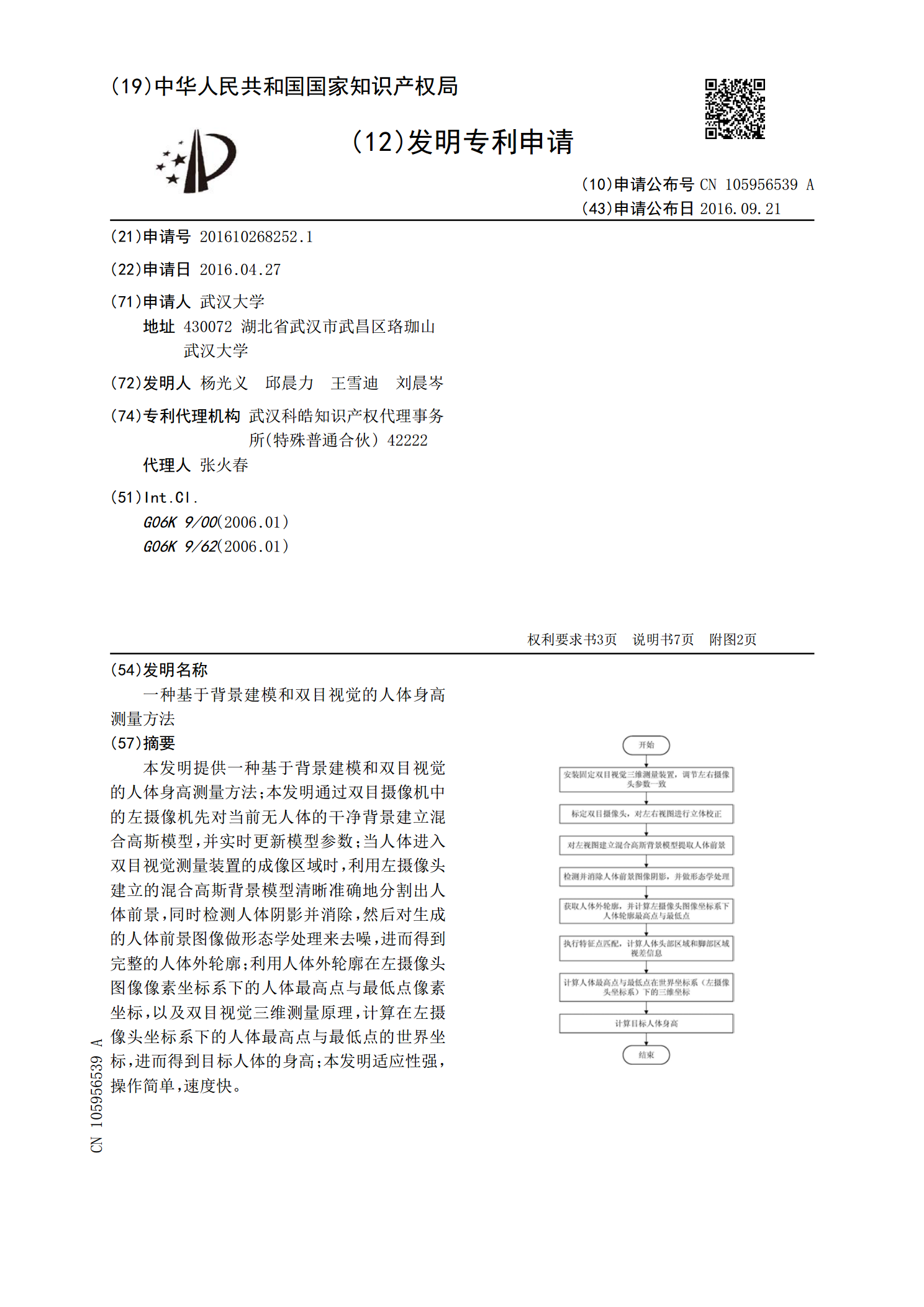
本发明提供一种基于背景建模和双目视觉的人体身高测量方法;本发明通过双目摄像机中的左摄像机先对当前无人体的干净背景建立混合高斯模型,并实时更新模型参数;当人体进入双目视觉测量装置的成像区域时,利用左摄像头建立的混合高斯背景模型清晰准确地分割出人体前景,同时检测人体阴影并消除,然后对生成的人体前景图像做形态学处理来去噪,进而得到完整的人体外轮廓;利用人体外轮廓在左摄像头图像像素坐标系下的人体最高点与最低点像素坐标,以及双目视觉三维测量原理,计算在左摄像头坐标系下的人体最高点与最低点的世界坐标,进而得到目标人体

一种基于背景建模对双目视觉图像的运动捕捉方法.pdf
本发明是一种基于背景分割对双目视觉图像的运动捕捉方法,可以完成对于人体作为前景的分割,同时对人体的上身躯干部分进行运动捕捉,从而完成人机交互的效果。本方法是在背景建模的基础上,通过对摄像头采集的干净背景进行高斯模型的建立,然后将采集的视频同背景模型进行比较,并通过双目摄像头所获得的深度信息,将场景的每一个像素给定一个属于前景或背景的概率值,并通过图切算法完成对场景前景和背景的分割。在分割前景是人体上身躯干的情况下,通过对前景轮廓的细化、去噪和关键点的确定,获得人体的基本骨架模型,从而完成运动捕捉的过程。
基于双目视觉的无人机编队飞行方法和系统.pdf
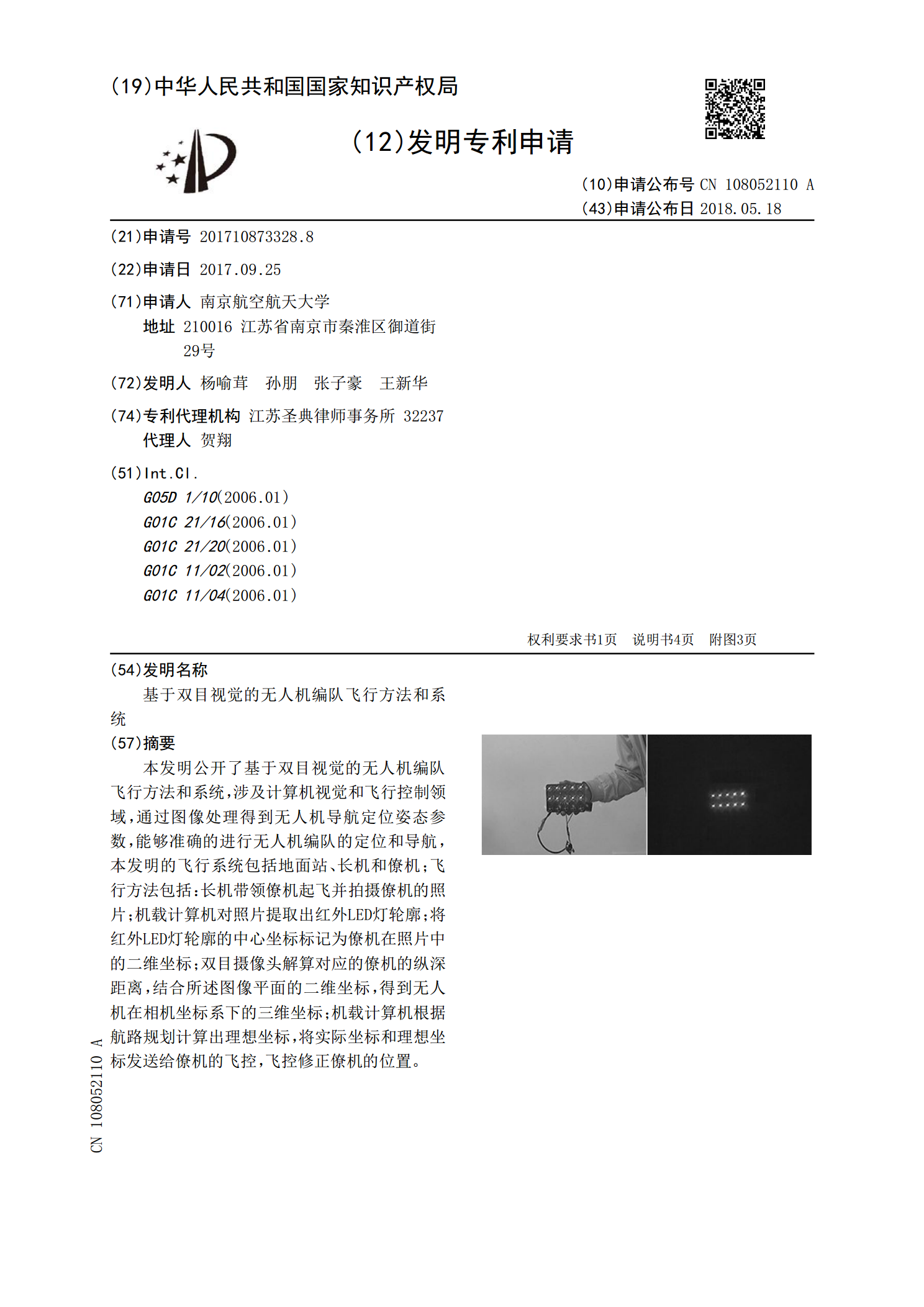
本发明公开了基于双目视觉的无人机编队飞行方法和系统,涉及计算机视觉和飞行控制领域,通过图像处理得到无人机导航定位姿态参数,能够准确的进行无人机编队的定位和导航,本发明的飞行系统包括地面站、长机和僚机;飞行方法包括:长机带领僚机起飞并拍摄僚机的照片;机载计算机对照片提取出红外LED灯轮廓;将红外LED灯轮廓的中心坐标标记为僚机在照片中的二维坐标;双目摄像头解算对应的僚机的纵深距离,结合所述图像平面的二维坐标,得到无人机在相机坐标系下的三维坐标;机载计算机根据航路规划计算出理想坐标,将实际坐标和理想坐标发送给
基于双目立体视觉运动估计方法、电子设备、车辆和介质.pdf
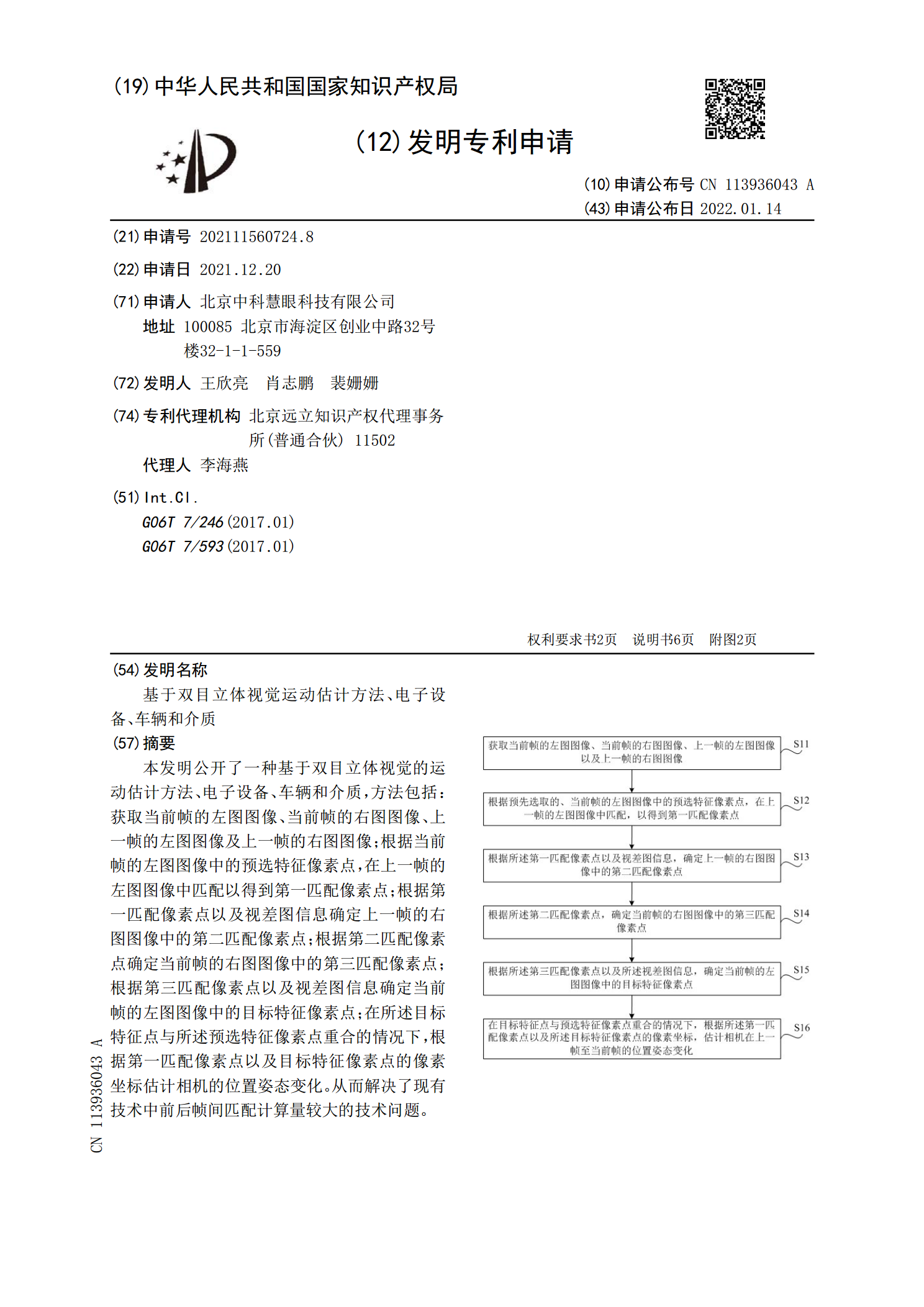
本发明公开了一种基于双目立体视觉的运动估计方法、电子设备、车辆和介质,方法包括:获取当前帧的左图图像、当前帧的右图图像、上一帧的左图图像及上一帧的右图图像;根据当前帧的左图图像中的预选特征像素点,在上一帧的左图图像中匹配以得到第一匹配像素点;根据第一匹配像素点以及视差图信息确定上一帧的右图图像中的第二匹配像素点;根据第二匹配像素点确定当前帧的右图图像中的第三匹配像素点;根据第三匹配像素点以及视差图信息确定当前帧的左图图像中的目标特征像素点;在所述目标特征点与所述预选特征像素点重合的情况下,根据第一匹配像素