
基于双目视觉的无人机编队飞行方法和系统.pdf

爱欢****23

1/9
2/9

3/9
4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于双目视觉的无人机编队飞行方法和系统.pdf
本发明公开了基于双目视觉的无人机编队飞行方法和系统,涉及计算机视觉和飞行控制领域,通过图像处理得到无人机导航定位姿态参数,能够准确的进行无人机编队的定位和导航,本发明的飞行系统包括地面站、长机和僚机;飞行方法包括:长机带领僚机起飞并拍摄僚机的照片;机载计算机对照片提取出红外LED灯轮廓;将红外LED灯轮廓的中心坐标标记为僚机在照片中的二维坐标;双目摄像头解算对应的僚机的纵深距离,结合所述图像平面的二维坐标,得到无人机在相机坐标系下的三维坐标;机载计算机根据航路规划计算出理想坐标,将实际坐标和理想坐标发送给

基于双目视觉的无人机飞行高度测量方法研究.pptx
汇报人:CONTENTS添加章节标题双目视觉原理立体视觉原理双目视觉系统组成双目视觉的关键技术双目视觉的应用领域无人机飞行高度测量方法传统测量方法基于GPS的测量方法基于激光雷达的测量方法基于双目视觉的测量方法基于双目视觉的无人机飞行高度测量系统设计系统硬件组成摄像头的选择与安装双目视觉算法实现飞行高度测量流程实验验证与结果分析实验环境与设备实验过程与数据采集实验结果分析结果比较与误差分析结论与展望研究结论研究不足与展望汇报人:
基于双目视觉的无人机水文监测自主避障系统和方法.pdf
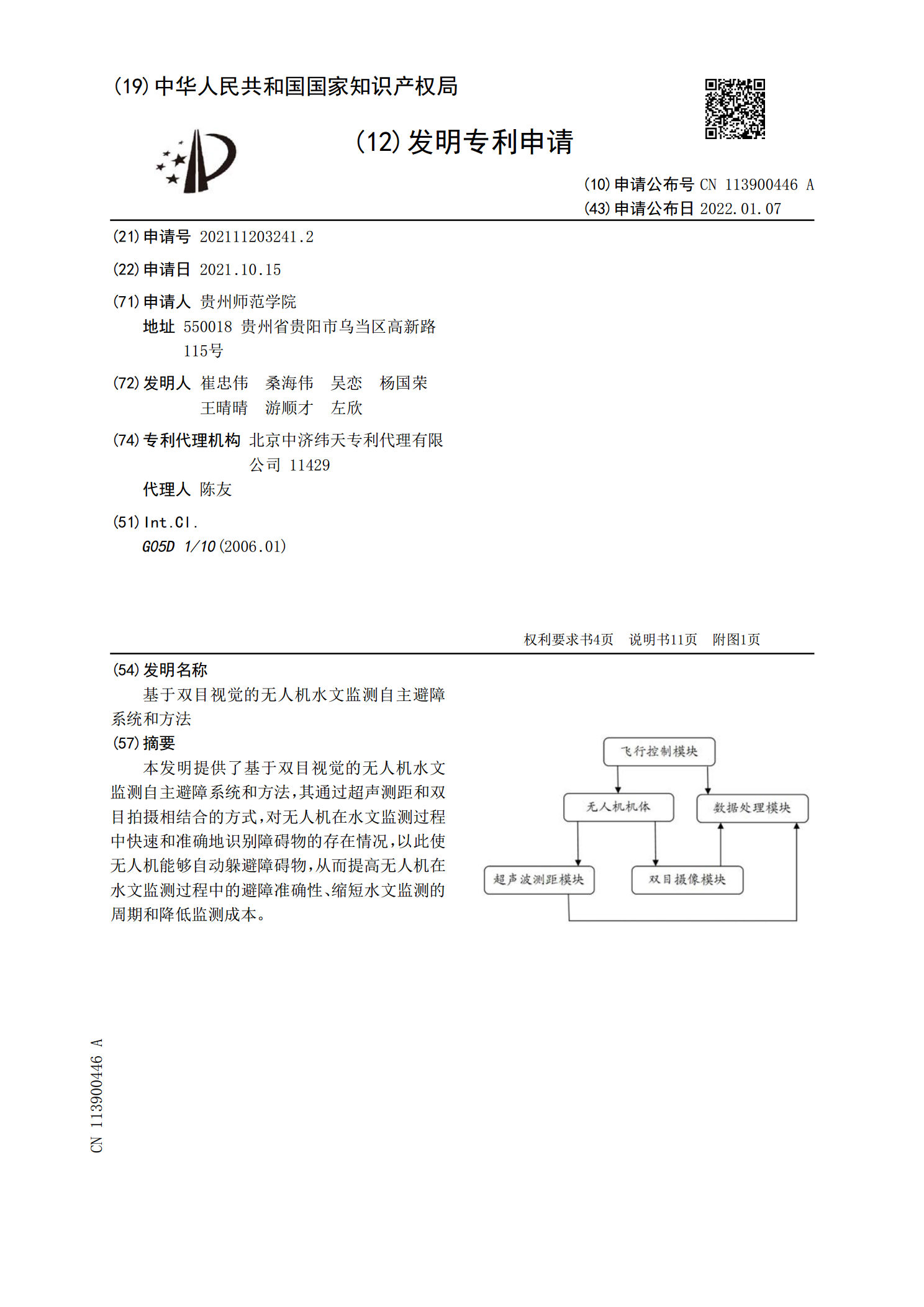
本发明提供了基于双目视觉的无人机水文监测自主避障系统和方法,其通过超声测距和双目拍摄相结合的方式,对无人机在水文监测过程中快速和准确地识别障碍物的存在情况,以此使无人机能够自动躲避障碍物,从而提高无人机在水文监测过程中的避障准确性、缩短水文监测的周期和降低监测成本。

基于变结构控制的无人机编队飞行方法.docx
基于变结构控制的无人机编队飞行方法Abstract:Withthedevelopmentofdronetechnology,theapplicationofdronehasbecomemoreandmoreextensive.Oneoftheimportantdirectionsofdroneapplicationisteamformation,whichhasbetterflexibility,betterresponse,andmoreextensiveapplicationprospectsthan
基于双目立体视觉和无人机的秸秆焚烧监测方法.pdf
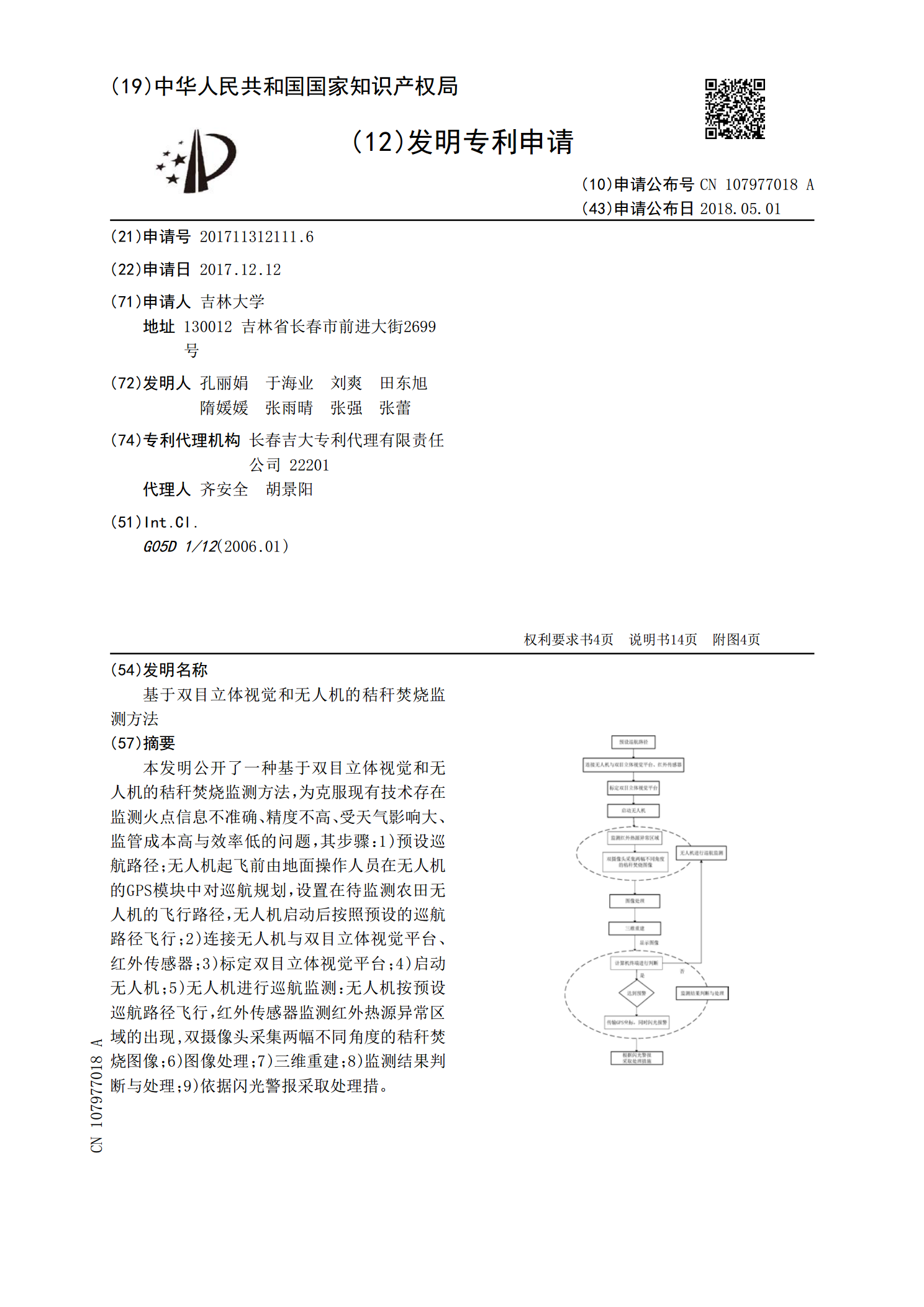
本发明公开了一种基于双目立体视觉和无人机的秸秆焚烧监测方法,为克服现有技术存在监测火点信息不准确、精度不高、受天气影响大、监管成本高与效率低的问题,其步骤:1)预设巡航路径;无人机起飞前由地面操作人员在无人机的GPS模块中对巡航规划,设置在待监测农田无人机的飞行路径,无人机启动后按照预设的巡航路径飞行;2)连接无人机与双目立体视觉平台、红外传感器;3)标定双目立体视觉平台;4)启动无人机;5)无人机进行巡航监测:无人机按预设巡航路径飞行,红外传感器监测红外热源异常区域的出现,双摄像头采集两幅不同角度的秸秆