
一种无人船舶自主航行能力评估方法.pdf

书生****12

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人船舶自主航行能力评估方法.pdf
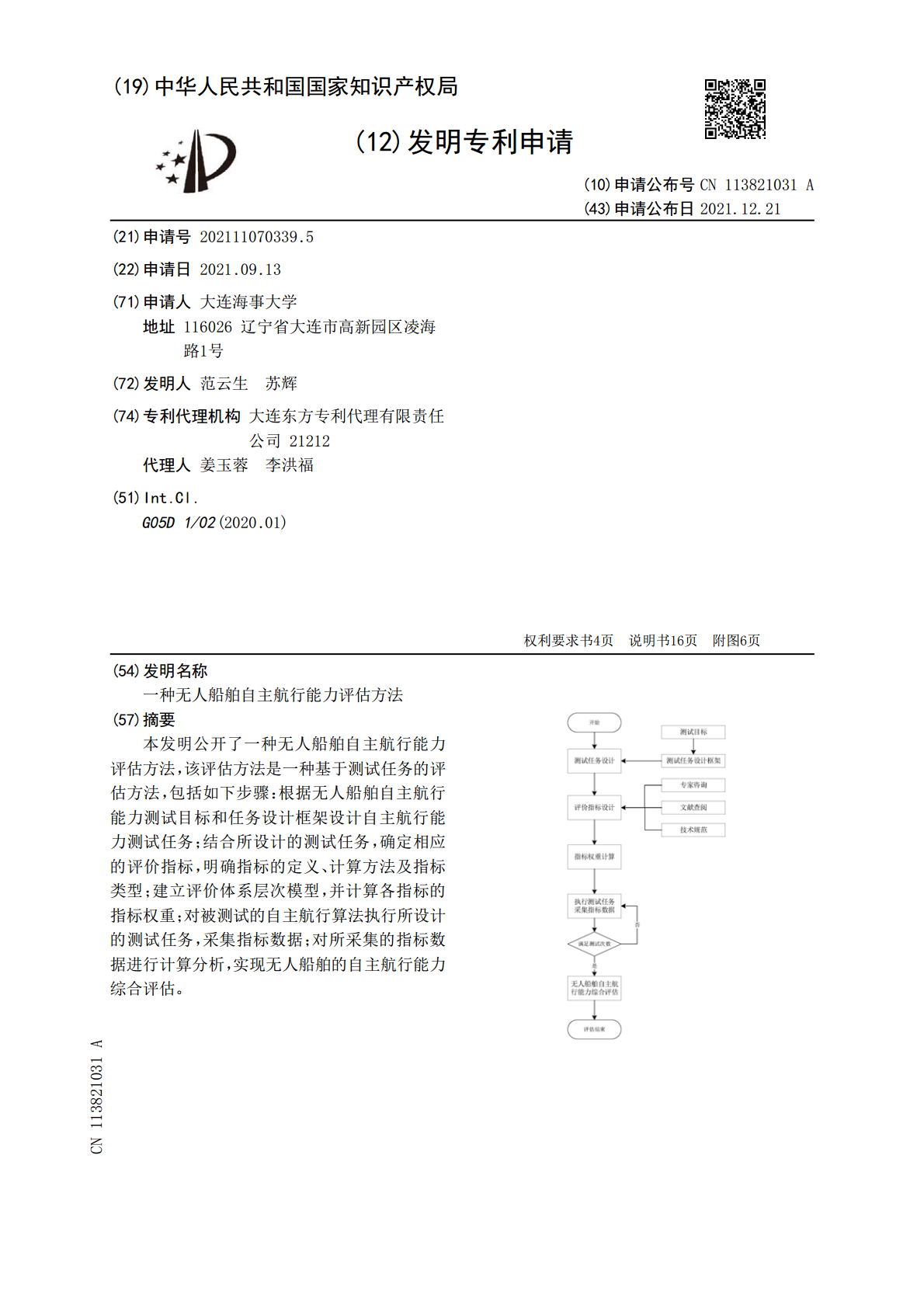
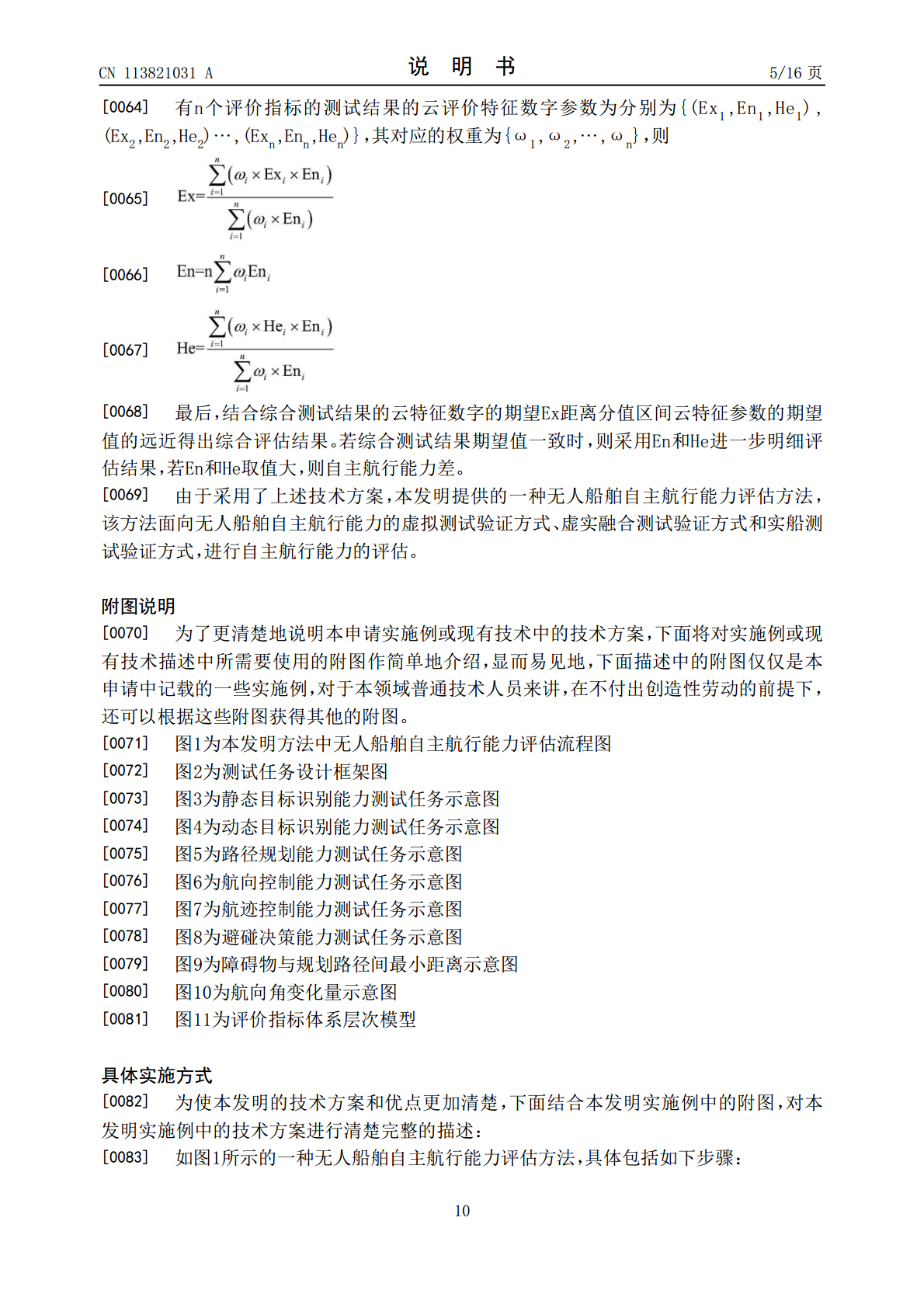
本发明公开了一种无人船舶自主航行能力评估方法,该评估方法是一种基于测试任务的评估方法,包括如下步骤:根据无人船舶自主航行能力测试目标和任务设计框架设计自主航行能力测试任务;结合所设计的测试任务,确定相应的评价指标,明确指标的定义、计算方法及指标类型;建立评价体系层次模型,并计算各指标的指标权重;对被测试的自主航行算法执行所设计的测试任务,采集指标数据;对所采集的指标数据进行计算分析,实现无人船舶的自主航行能力综合评估。
一种无人艇自主航行控制算法仿真评估系统.pdf
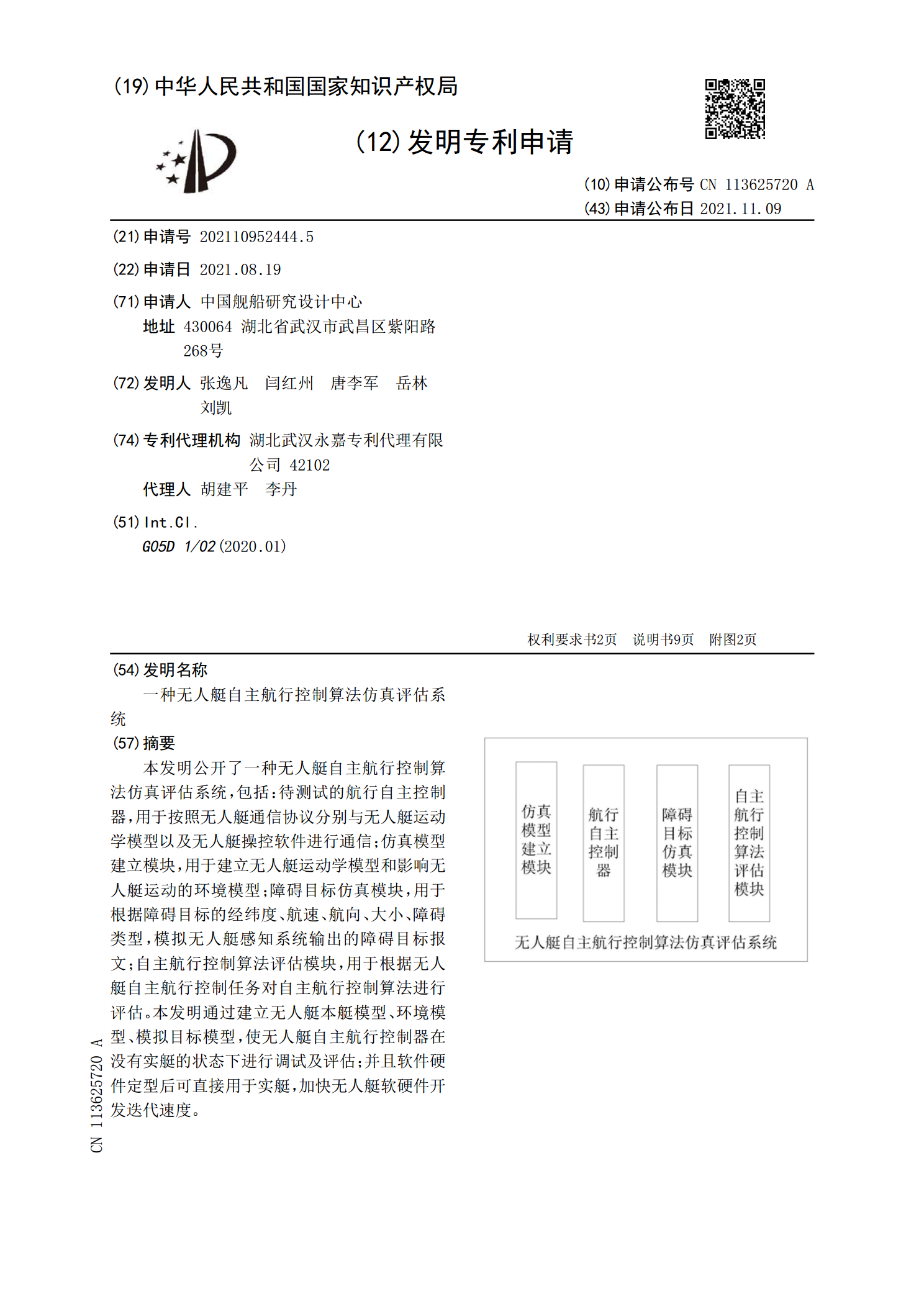
本发明公开了一种无人艇自主航行控制算法仿真评估系统,包括:待测试的航行自主控制器,用于按照无人艇通信协议分别与无人艇运动学模型以及无人艇操控软件进行通信;仿真模型建立模块,用于建立无人艇运动学模型和影响无人艇运动的环境模型;障碍目标仿真模块,用于根据障碍目标的经纬度、航速、航向、大小、障碍类型,模拟无人艇感知系统输出的障碍目标报文;自主航行控制算法评估模块,用于根据无人艇自主航行控制任务对自主航行控制算法进行评估。本发明通过建立无人艇本艇模型、环境模型、模拟目标模型,使无人艇自主航行控制器在没有实艇的状态
一种无人船自主航行系统及其方法.pdf
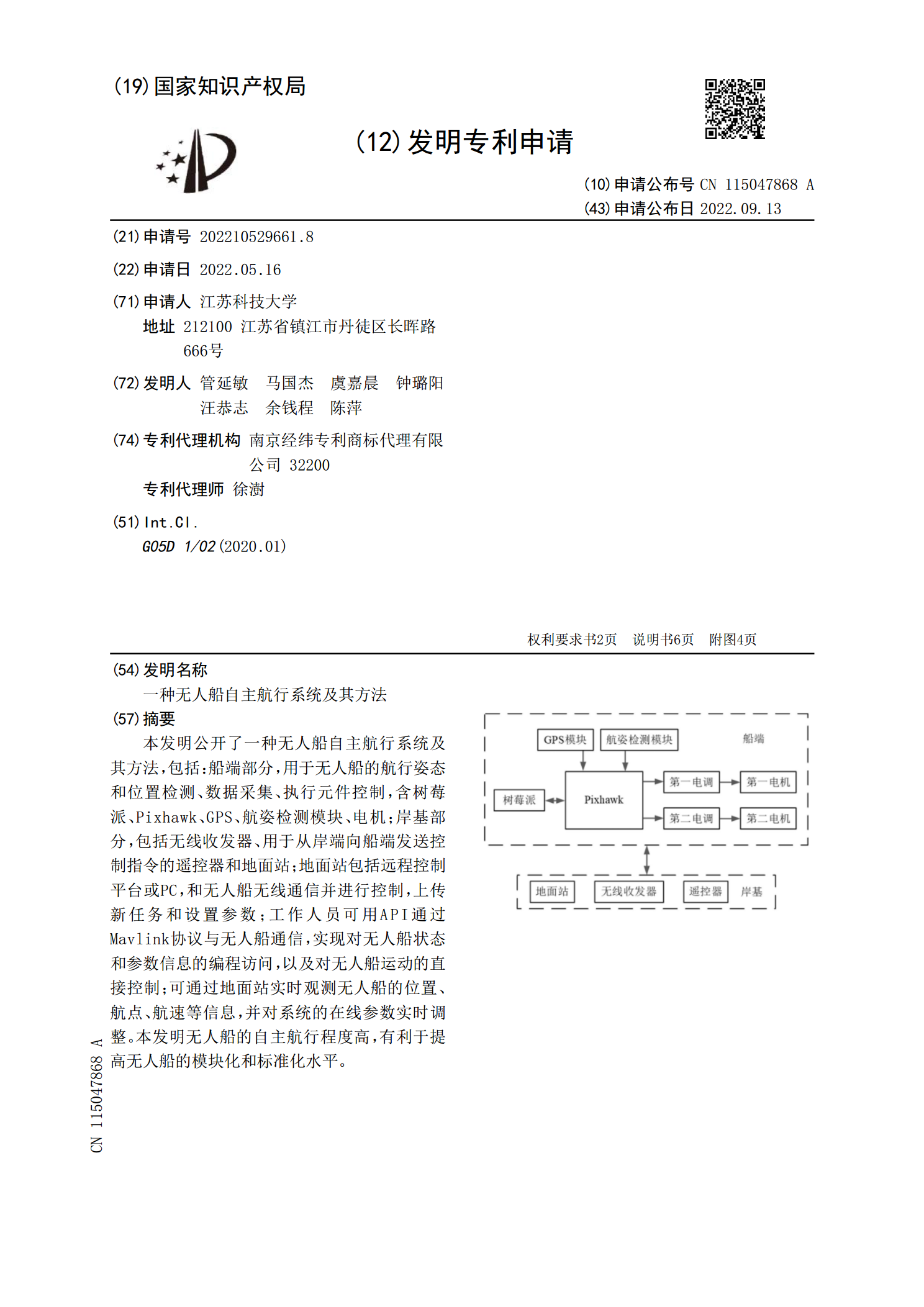
本发明公开了一种无人船自主航行系统及其方法,包括:船端部分,用于无人船的航行姿态和位置检测、数据采集、执行元件控制,含树莓派、Pixhawk、GPS、航姿检测模块、电机;岸基部分,包括无线收发器、用于从岸端向船端发送控制指令的遥控器和地面站;地面站包括远程控制平台或PC,和无人船无线通信并进行控制,上传新任务和设置参数;工作人员可用API通过Mavlink协议与无人船通信,实现对无人船状态和参数信息的编程访问,以及对无人船运动的直接控制;可通过地面站实时观测无人船的位置、航点、航速等信息,并对系统的在线参

一种无人艇航行状态的监测评估方法.pdf
本发明公开了异常状态监测领域的一种无人艇航行状态的监测评估方法,包括:步骤1:收集无人艇的数据,分析得到无人艇状态数据集,并对状态等级进行划分;步骤2:搭建孤立森林异常状态监测模型,对状态数据是否异常做出初步甄别;步骤3:搭建径向基网络分类模型,将状态数据输入到径向基函数神经网络中进行分类,输出为具体的故障类型,并根据其程度划分等级;步骤4:通过四种优化方法改进的PSO算法对网络参数进行寻优。本发明监测评估方法对测得的无人艇航行数据进行检测,判断数据是否含有不合理的异常值,并对异常值进行剔除、填补等操作,

无人船舶航行精度实船测试方法和系统.pdf
本发明提供了一种无人船舶航行精度实船测试方法和系统,包括:步骤1:对测试设备进行布设、安装固定,并对测试设备的精度、时间戳、转向角度零位进行标定;步骤2:按照预设航路和航行参数进行测试试验,控制光学追踪设备对无人船上的靶物进行识别跟踪;步骤3:利用测试设备对无人船航行数据进行测量并记录;步骤4:待所有航次试验完成后,取多组对同一时间戳下的GPS轨迹数据和测距设备所测的间距值进行比较分析,最终得到无人船准确的航行精度。本发明综合GPS以及光学测量结果,提高了测试精度,并且光学测试设备不受GPS信号接收质量的