
一种无人船自主航行系统及其方法.pdf

一吃****福乾

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人船自主航行系统及其方法.pdf
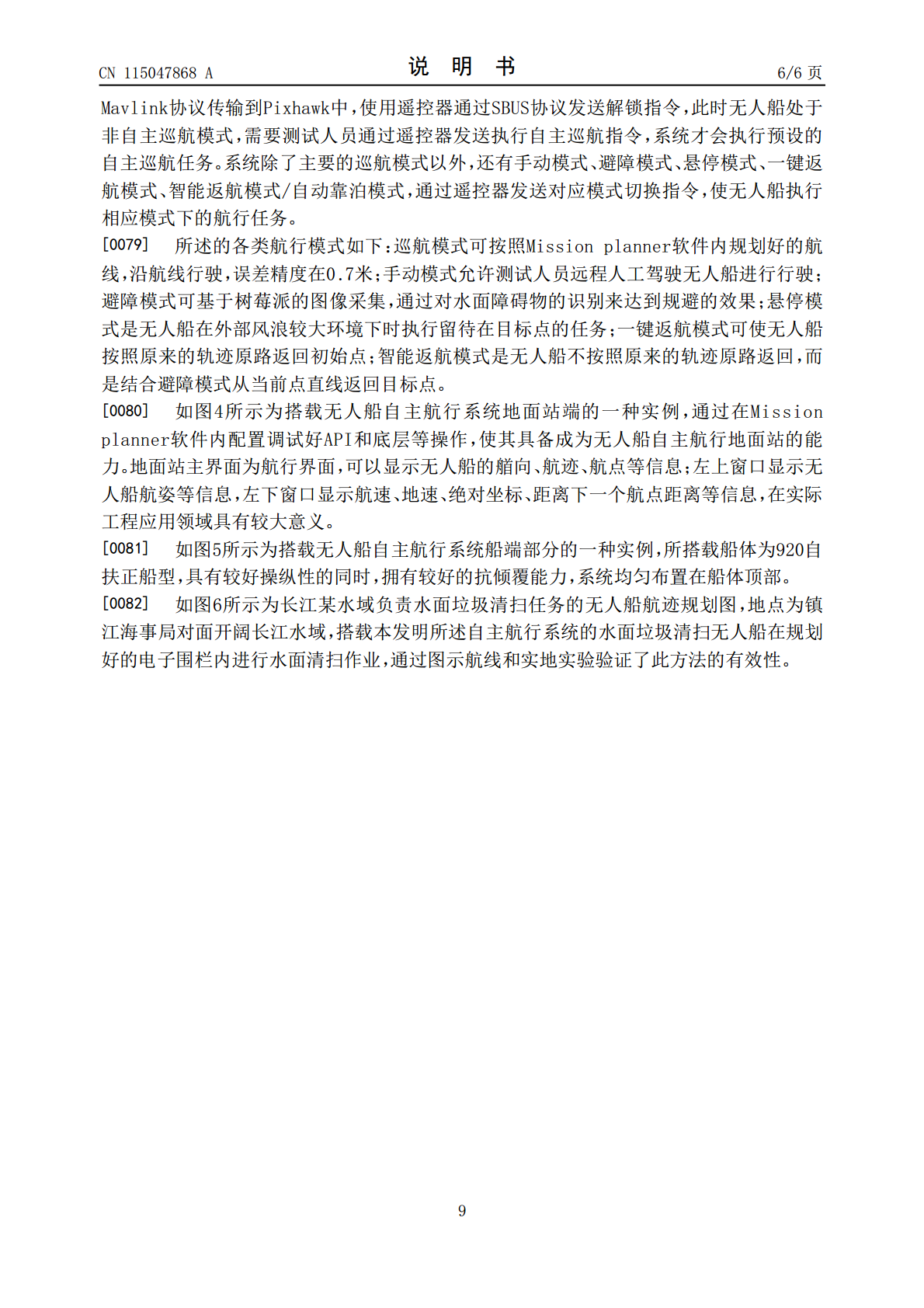
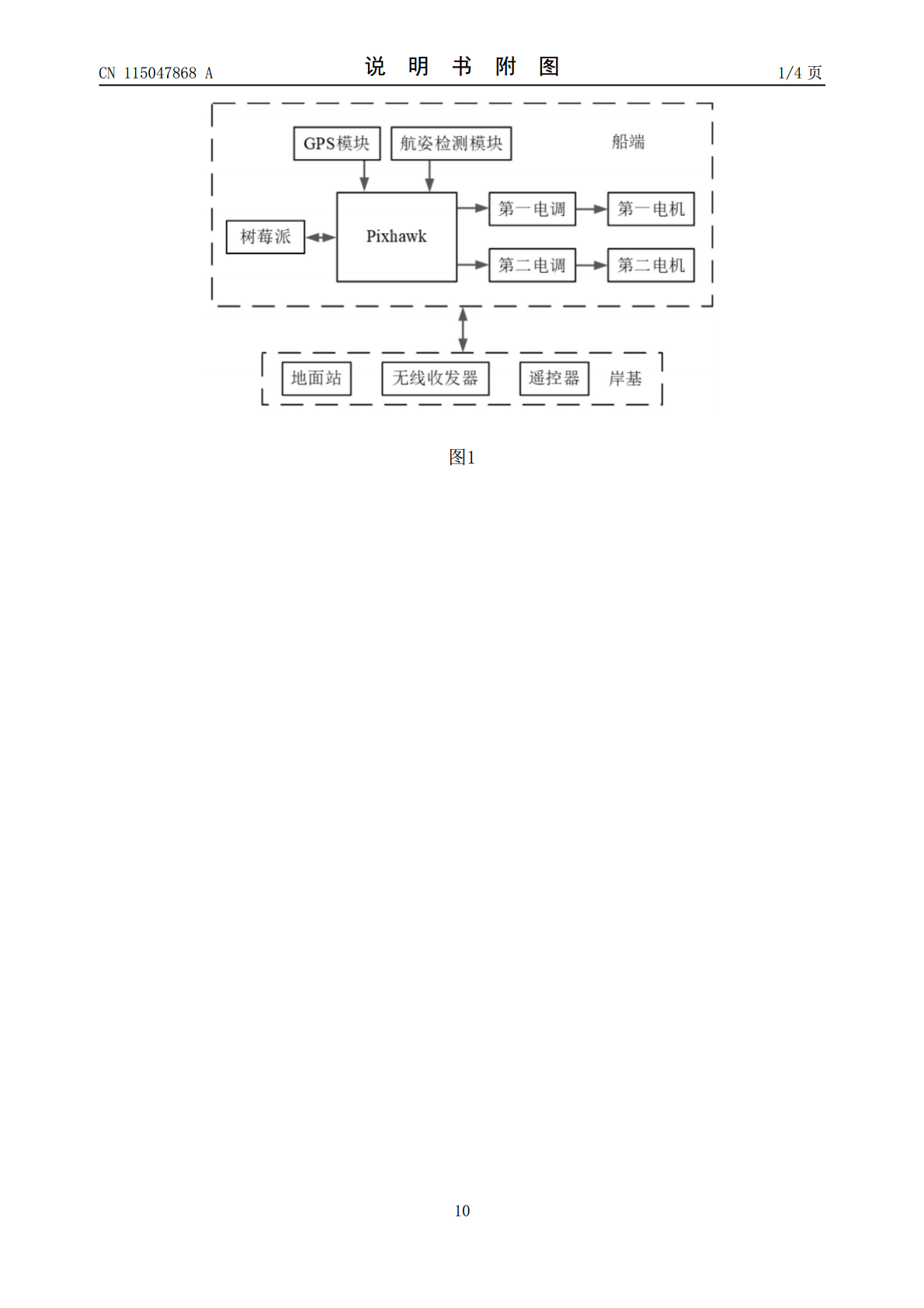
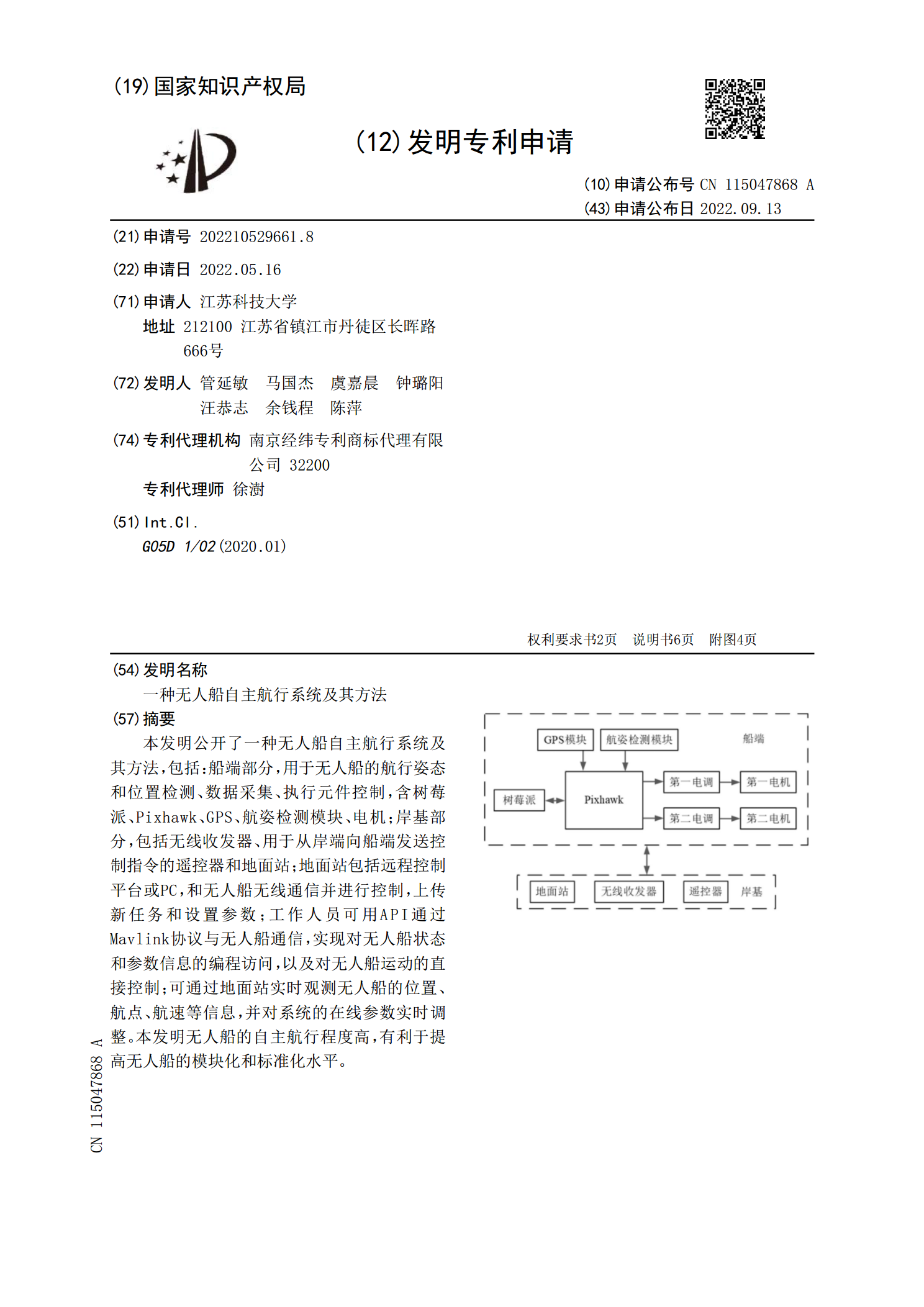
本发明公开了一种无人船自主航行系统及其方法,包括:船端部分,用于无人船的航行姿态和位置检测、数据采集、执行元件控制,含树莓派、Pixhawk、GPS、航姿检测模块、电机;岸基部分,包括无线收发器、用于从岸端向船端发送控制指令的遥控器和地面站;地面站包括远程控制平台或PC,和无人船无线通信并进行控制,上传新任务和设置参数;工作人员可用API通过Mavlink协议与无人船通信,实现对无人船状态和参数信息的编程访问,以及对无人船运动的直接控制;可通过地面站实时观测无人船的位置、航点、航速等信息,并对系统的在线参
无人船测绘航行系统及其控制方法.pdf
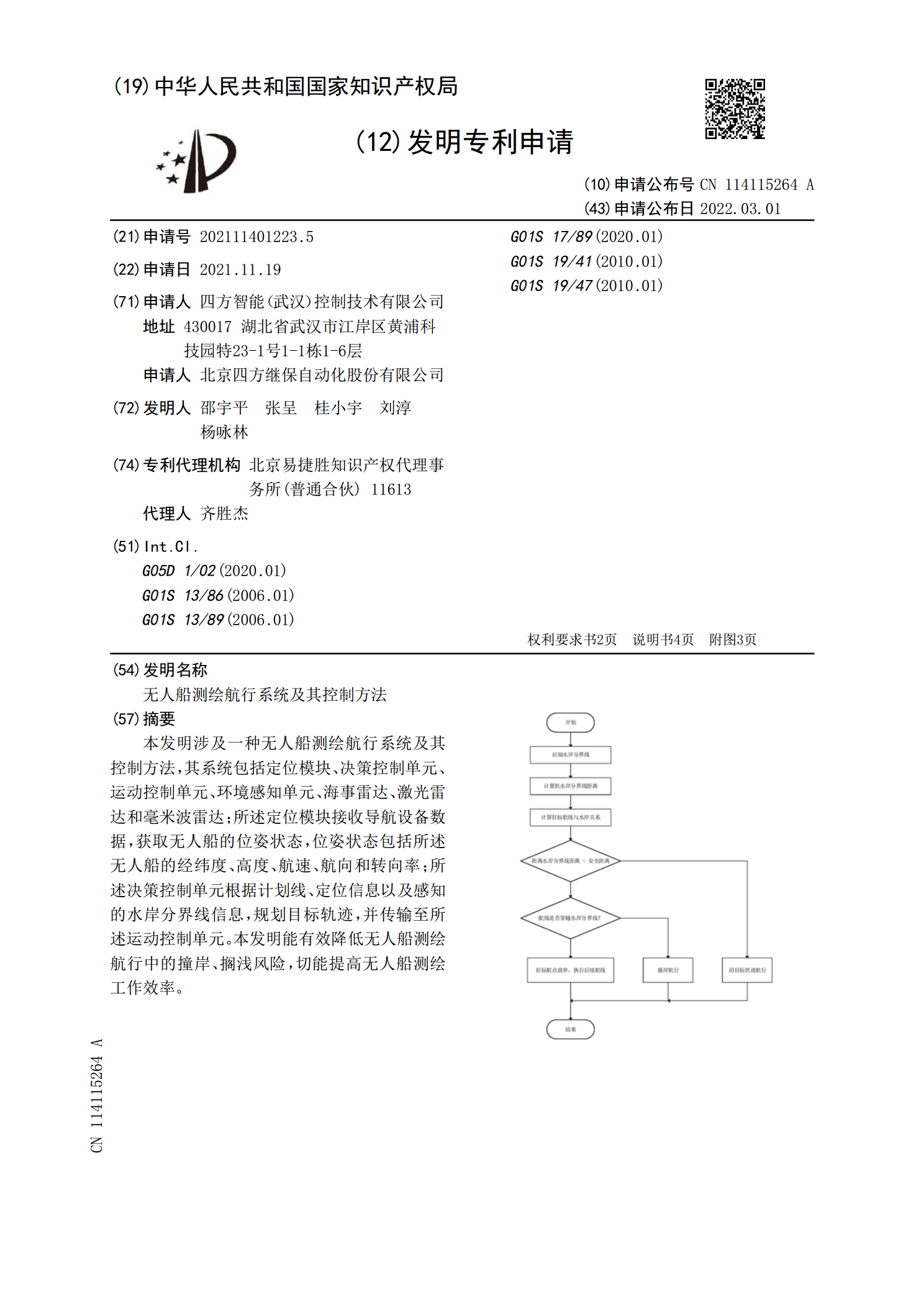
本发明涉及一种无人船测绘航行系统及其控制方法,其系统包括定位模块、决策控制单元、运动控制单元、环境感知单元、海事雷达、激光雷达和毫米波雷达;所述定位模块接收导航设备数据,获取无人船的位姿状态,位姿状态包括所述无人船的经纬度、高度、航速、航向和转向率;所述决策控制单元根据计划线、定位信息以及感知的水岸分界线信息,规划目标轨迹,并传输至所述运动控制单元。本发明能有效降低无人船测绘航行中的撞岸、搁浅风险,切能提高无人船测绘工作效率。

无人船舶航行精度实船测试方法和系统.pdf
本发明提供了一种无人船舶航行精度实船测试方法和系统,包括:步骤1:对测试设备进行布设、安装固定,并对测试设备的精度、时间戳、转向角度零位进行标定;步骤2:按照预设航路和航行参数进行测试试验,控制光学追踪设备对无人船上的靶物进行识别跟踪;步骤3:利用测试设备对无人船航行数据进行测量并记录;步骤4:待所有航次试验完成后,取多组对同一时间戳下的GPS轨迹数据和测距设备所测的间距值进行比较分析,最终得到无人船准确的航行精度。本发明综合GPS以及光学测量结果,提高了测试精度,并且光学测试设备不受GPS信号接收质量的
无人船避障方法及其系统.pdf
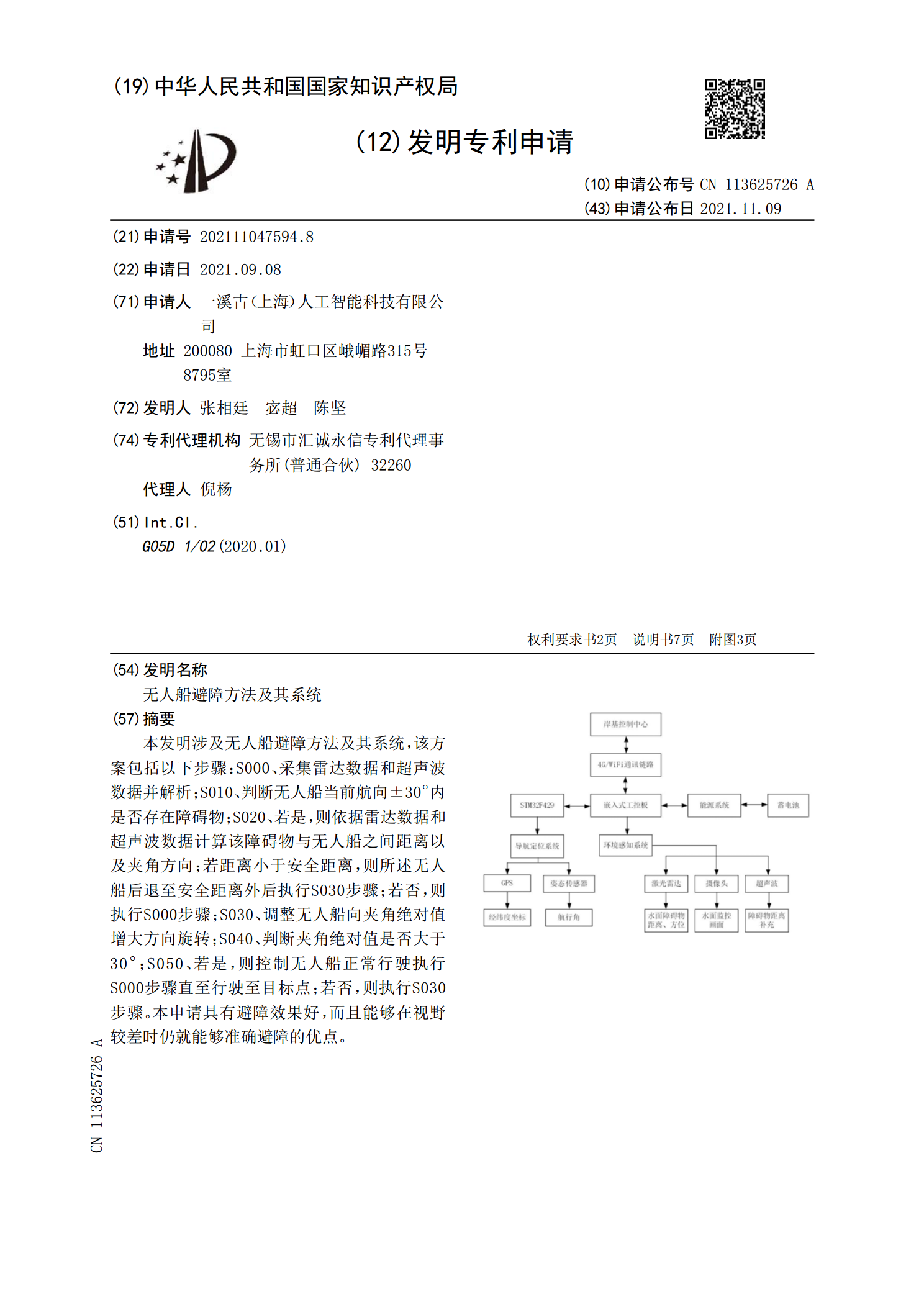
本发明涉及无人船避障方法及其系统,该方案包括以下步骤:S000、采集雷达数据和超声波数据并解析;S010、判断无人船当前航向±30°内是否存在障碍物;S020、若是,则依据雷达数据和超声波数据计算该障碍物与无人船之间距离以及夹角方向;若距离小于安全距离,则所述无人船后退至安全距离外后执行S030步骤;若否,则执行S000步骤;S030、调整无人船向夹角绝对值增大方向旋转;S040、判断夹角绝对值是否大于30°;S050、若是,则控制无人船正常行驶执行S000步骤直至行驶至目标点;若否,则执行S030步骤。

一种无人船舶自主航行能力评估方法.pdf
本发明公开了一种无人船舶自主航行能力评估方法,该评估方法是一种基于测试任务的评估方法,包括如下步骤:根据无人船舶自主航行能力测试目标和任务设计框架设计自主航行能力测试任务;结合所设计的测试任务,确定相应的评价指标,明确指标的定义、计算方法及指标类型;建立评价体系层次模型,并计算各指标的指标权重;对被测试的自主航行算法执行所设计的测试任务,采集指标数据;对所采集的指标数据进行计算分析,实现无人船舶的自主航行能力综合评估。