
自动驾驶路径规划方法、装置、设备及存储介质.pdf

一只****生物


1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动驾驶路径规划方法、装置、设备及存储介质.pdf
本申请提供了一种自动驾驶路径规划方法、装置、设备及存储介质,涉及自动驾驶技术领域,该方法包括:获取激光雷达采集的道路信息构建高精度地图;确定当前位置和目标位置;确定行驶路径上的障碍物,并采用状态栅格算法计算多条从当前位置到目标位置的行驶路径;用度量函数选取行驶代价最小的行驶路径作为目标行驶路径。本申请实施例能够减少路径规划的随机性,在给定起点和终点坐标后,能够找到可行驶路径并推导出相应的输入信息,在对动态障碍物避障的时候,无人车进行局部路径规划,能够合理选择一条可行驶路径。根据运动学约束条件,如速度、转弯
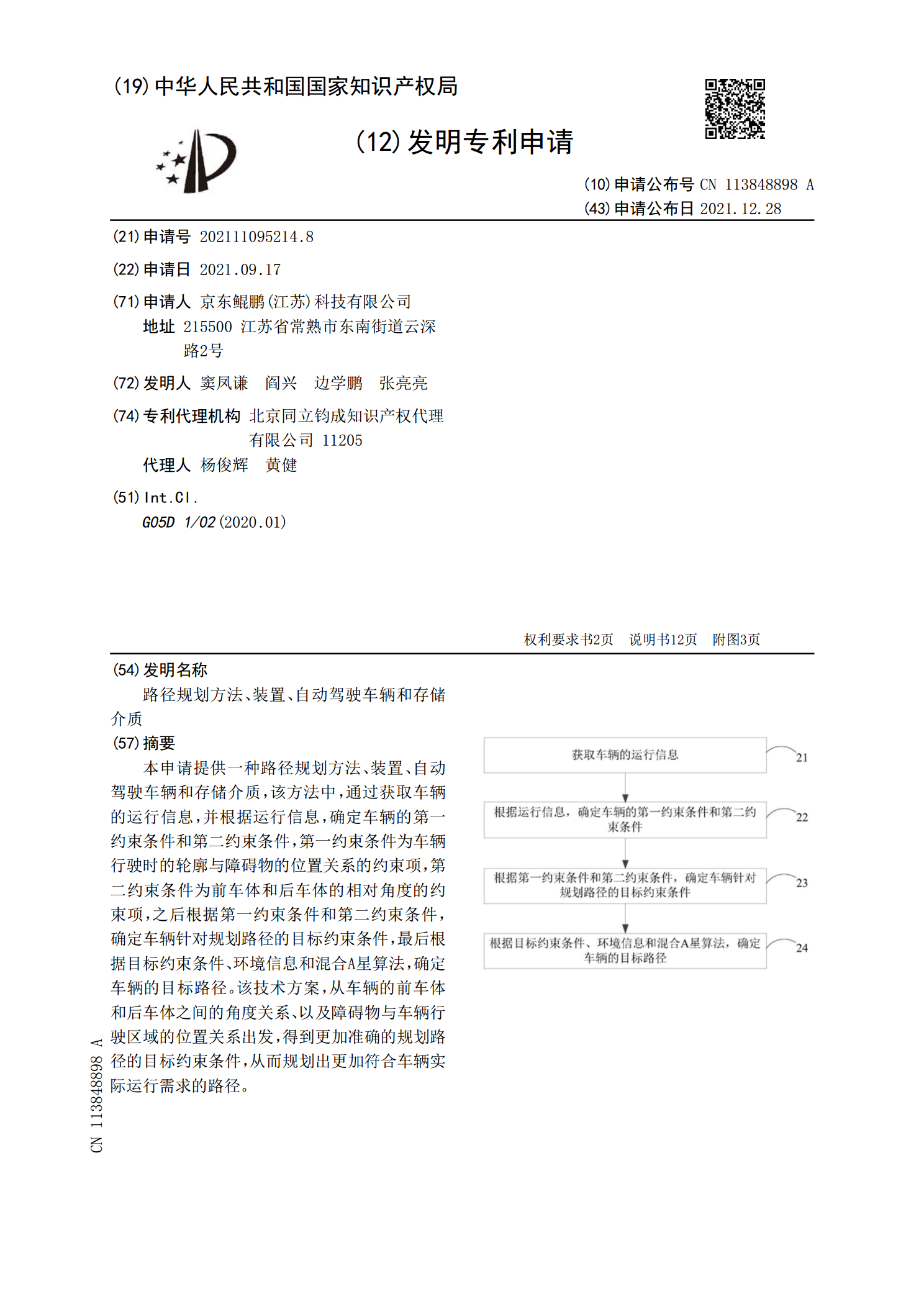
路径规划方法、装置、自动驾驶车辆和存储介质.pdf
本申请提供一种路径规划方法、装置、自动驾驶车辆和存储介质,该方法中,通过获取车辆的运行信息,并根据运行信息,确定车辆的第一约束条件和第二约束条件,第一约束条件为车辆行驶时的轮廓与障碍物的位置关系的约束项,第二约束条件为前车体和后车体的相对角度的约束项,之后根据第一约束条件和第二约束条件,确定车辆针对规划路径的目标约束条件,最后根据目标约束条件、环境信息和混合A星算法,确定车辆的目标路径。该技术方案,从车辆的前车体和后车体之间的角度关系、以及障碍物与车辆行驶区域的位置关系出发,得到更加准确的规划路径的目标约
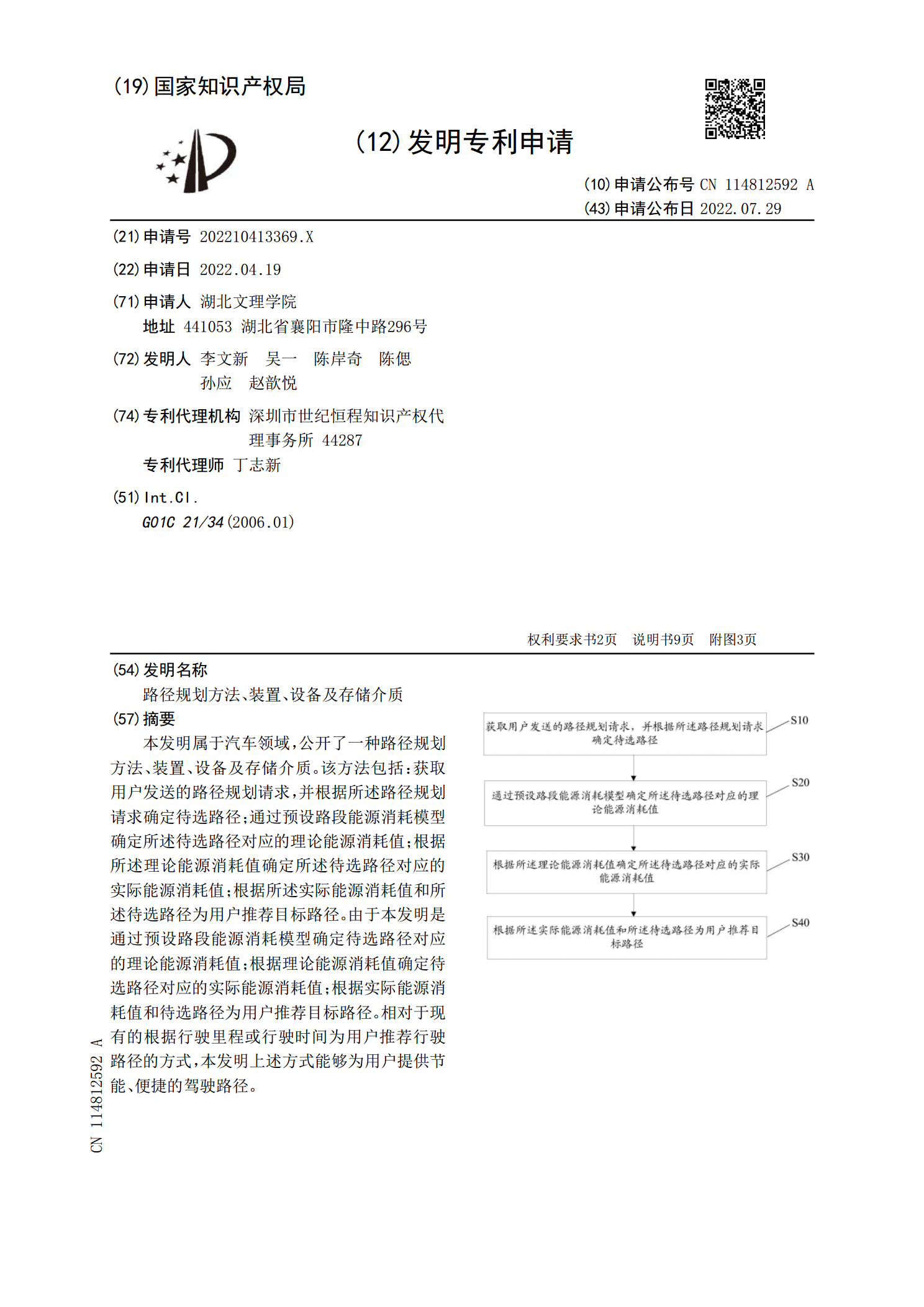
路径规划方法、装置、设备及存储介质.pdf
本发明属于汽车领域,公开了一种路径规划方法、装置、设备及存储介质。该方法包括:获取用户发送的路径规划请求,并根据所述路径规划请求确定待选路径;通过预设路段能源消耗模型确定所述待选路径对应的理论能源消耗值;根据所述理论能源消耗值确定所述待选路径对应的实际能源消耗值;根据所述实际能源消耗值和所述待选路径为用户推荐目标路径。由于本发明是通过预设路段能源消耗模型确定待选路径对应的理论能源消耗值;根据理论能源消耗值确定待选路径对应的实际能源消耗值;根据实际能源消耗值和待选路径为用户推荐目标路径。相对于现有的根据行驶
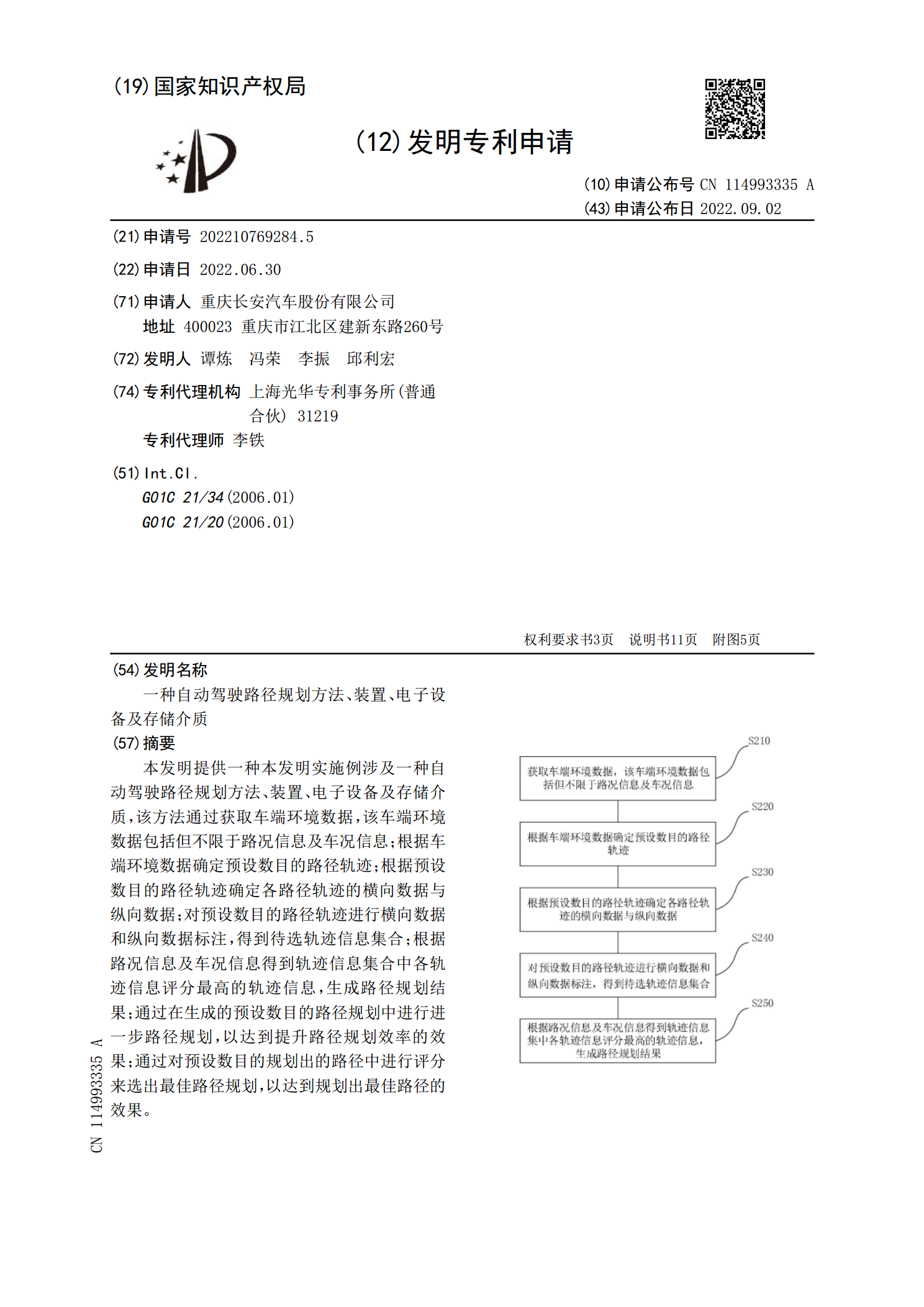
一种自动驾驶路径规划方法、装置、电子设备及存储介质.pdf
本发明提供一种本发明实施例涉及一种自动驾驶路径规划方法、装置、电子设备及存储介质,该方法通过获取车端环境数据,该车端环境数据包括但不限于路况信息及车况信息;根据车端环境数据确定预设数目的路径轨迹;根据预设数目的路径轨迹确定各路径轨迹的横向数据与纵向数据;对预设数目的路径轨迹进行横向数据和纵向数据标注,得到待选轨迹信息集合;根据路况信息及车况信息得到轨迹信息集合中各轨迹信息评分最高的轨迹信息,生成路径规划结果;通过在生成的预设数目的路径规划中进行进一步路径规划,以达到提升路径规划效率的效果;通过对预设数目的
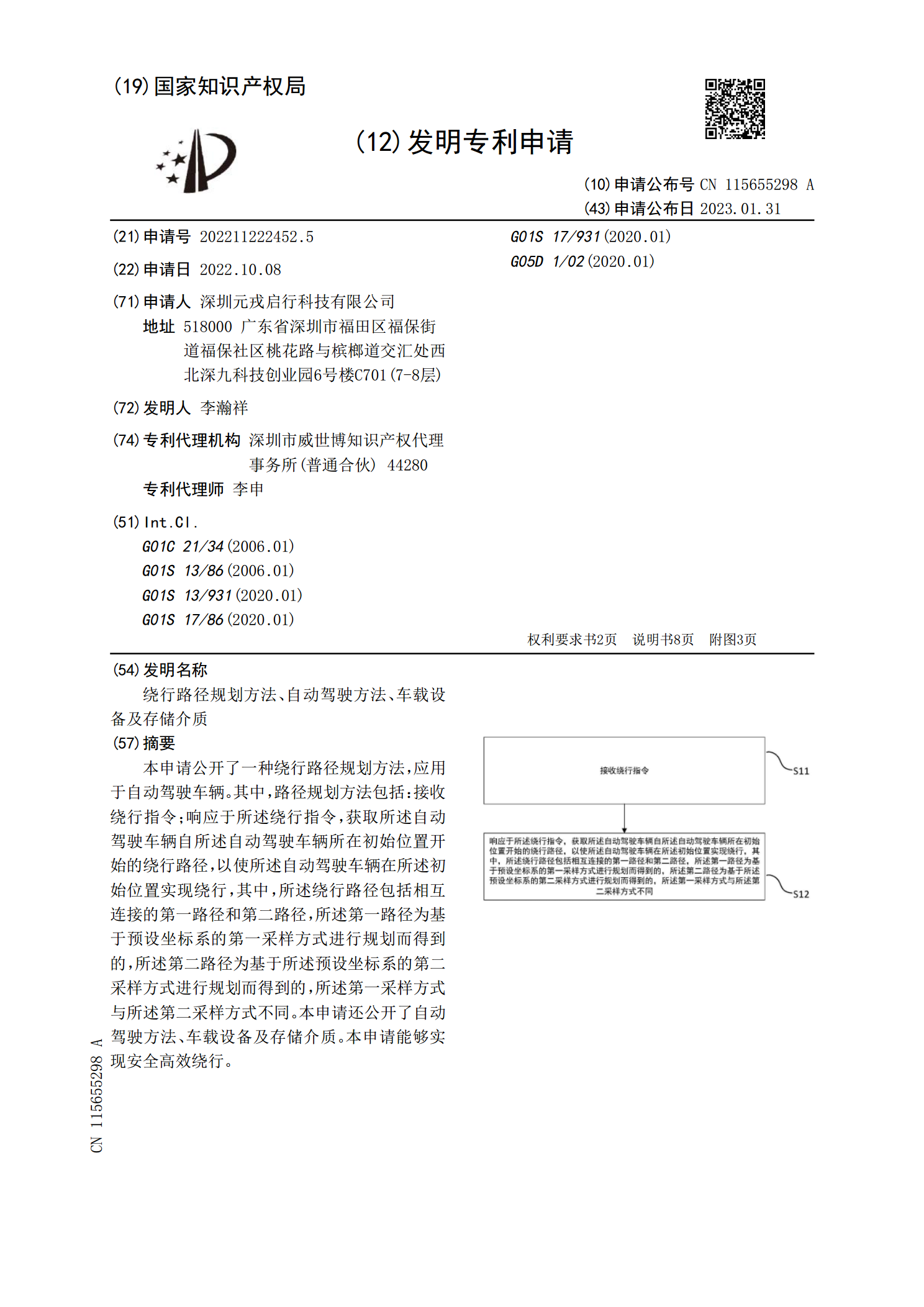
绕行路径规划方法、自动驾驶方法、车载设备及存储介质.pdf
本申请公开了一种绕行路径规划方法,应用于自动驾驶车辆。其中,路径规划方法包括:接收绕行指令;响应于所述绕行指令,获取所述自动驾驶车辆自所述自动驾驶车辆所在初始位置开始的绕行路径,以使所述自动驾驶车辆在所述初始位置实现绕行,其中,所述绕行路径包括相互连接的第一路径和第二路径,所述第一路径为基于预设坐标系的第一采样方式进行规划而得到的,所述第二路径为基于所述预设坐标系的第二采样方式进行规划而得到的,所述第一采样方式与所述第二采样方式不同。本申请还公开了自动驾驶方法、车载设备及存储介质。本申请能够实现安全高效绕