
物体识别方法、系统、终端设备及存储介质.pdf

宏硕****mo


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物体识别方法、系统、终端设备及存储介质.pdf
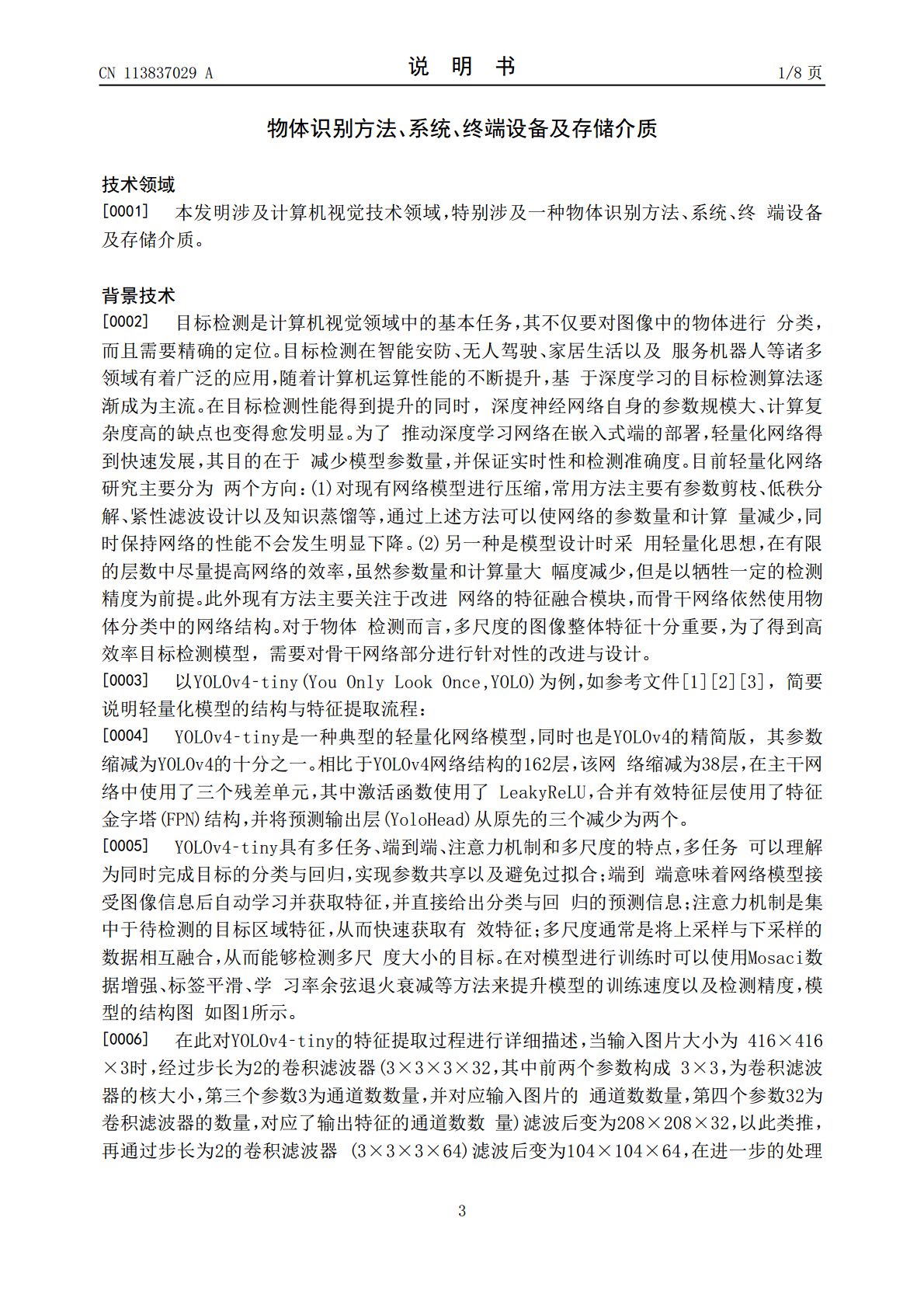
本发明公开了一种物体识别方法、系统、终端设备及存储介质,其物体识别方法包括:S1、采集室内真实环境下不同物体的图片数据集,对图片进行标定,并划分训练集和测试集;S2、将YOLOv4_tiny网络模型主干网络中部分卷积层替换成逆残差层,并在YOLOv4_tiny网络模型主干网络末端加入SPP层,得到改进的轻量化网络模型;S3、利用训练集和测试集对改进的轻量化网络模型进行训练和测试,得到训练后的轻量化网络模型;S4、利用训练后的轻量化网络模型对室内物体进行识别。本发明在几乎不增加模型计算量和参数存储量的前提下
太空物体的识别方法、装置、终端设备及可读存储介质.pdf
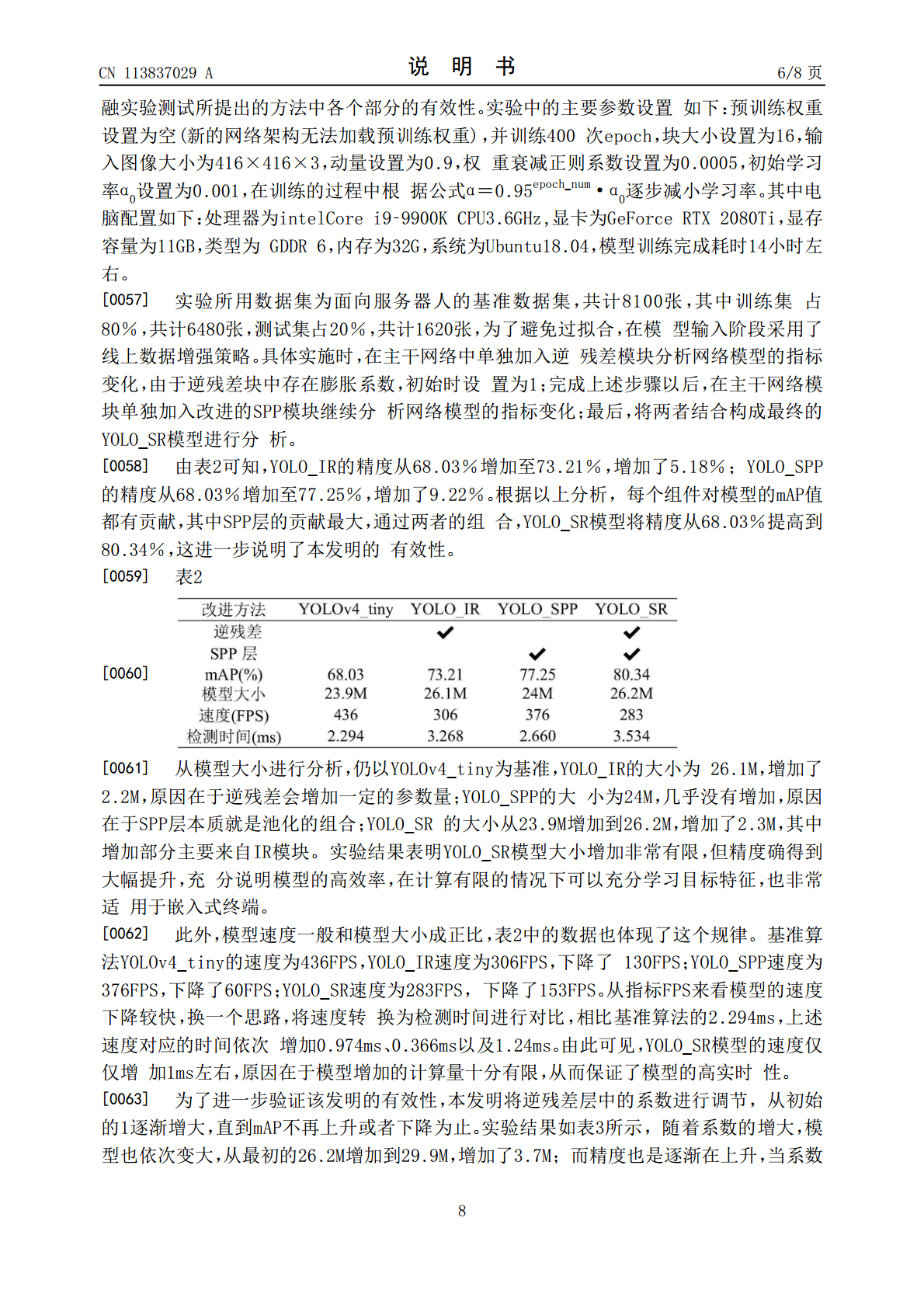
本发明提供了一种太空物体的识别方法、装置、终端设备及可读存储介质,包括:控制每个光学望远镜同步采集空间位置处的星轨图像;其中,星轨图像所显示的内容至少包括待识别太空物体的运动轨迹;基于每个光学望远镜采集的星轨图像,确定待识别太空物体对应的三维信息;其中,三维信息用于表征运动轨迹所属的星轨层次;基于运动轨迹所属的星轨层次对待识别太空物体进行识别,得到待识别太空物体的识别结果。本发明可以在无目标轨道信息的前提下,自动对太空物体进行识别,有效提高识别太空物体的效率、准确率,还可以有效降低识别太空物体所需的人力资

状态识别方法、系统、终端设备及存储介质.pdf
本申请提供一种状态识别方法、系统、终端设备及存储介质,用于确定农机的作业状态,农机设有机具,状态识别方法包括:获取机具的实时角度值,其中,实时角度值与机具实时的倾斜角度对应;确定实时角度值是否满足预设条件;若满足预设条件,则根据实时角度值和机具的长度信息确定当前机具的作业深度;确定作业深度是否满足深松阈值条件;若作业深度满足深松阈值条件,则对实时角度值和获取实时角度值的时间进行记录。可以通过机具实时的倾斜角度获知农机是否进行深松作业,并实时对深松作业的时间点和实时角度值进行记录,提高深松作业记录的准确性。
文件版本识别方法、系统、终端设备及存储介质.pdf
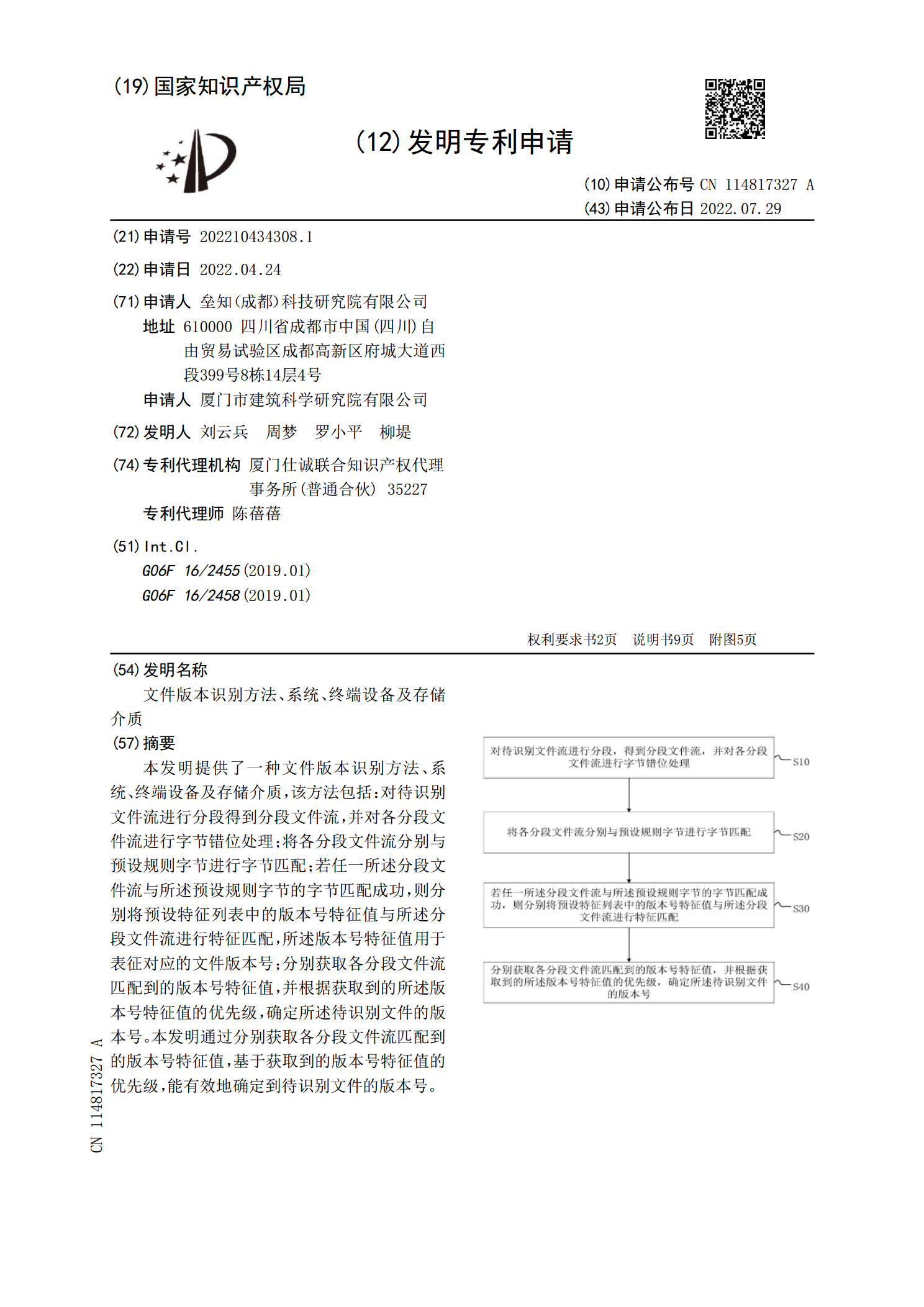
本发明提供了一种文件版本识别方法、系统、终端设备及存储介质,该方法包括:对待识别文件流进行分段得到分段文件流,并对各分段文件流进行字节错位处理;将各分段文件流分别与预设规则字节进行字节匹配;若任一所述分段文件流与所述预设规则字节的字节匹配成功,则分别将预设特征列表中的版本号特征值与所述分段文件流进行特征匹配,所述版本号特征值用于表征对应的文件版本号;分别获取各分段文件流匹配到的版本号特征值,并根据获取到的所述版本号特征值的优先级,确定所述待识别文件的版本号。本发明通过分别获取各分段文件流匹配到的版本号特征

信贷欺诈行为识别方法、系统、终端设备及存储介质.pdf
本公开提供一种基于纵向联邦学习的信贷欺诈行为识别方法、系统、终端设备及计算机可读存储介质,以解决目前信贷欺诈行为识别时效性低以及识别结果不准确等问题,其中,所述方法包括:分别获取运营商侧数据集和信贷业务侧数据集;基于纵向联邦学习算法对所述运营商侧数据集和所述信贷业务侧数据集进行训练,得到信贷业务联邦预测模型;基于所述信贷业务联邦预测模型对当前的信贷业务数据进行预测,得到预测结果;以及,基于所述预测结果识别出信贷欺诈行为。本公开利用纵向联邦学习对双方数据源进行训练扩充,建立信贷业务联邦预测模型,其数据覆盖范