
巡检机器人运输电梯控制方法、装置、设备及存储介质.pdf

是丹****ni

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
巡检机器人运输电梯控制方法、装置、设备及存储介质.pdf
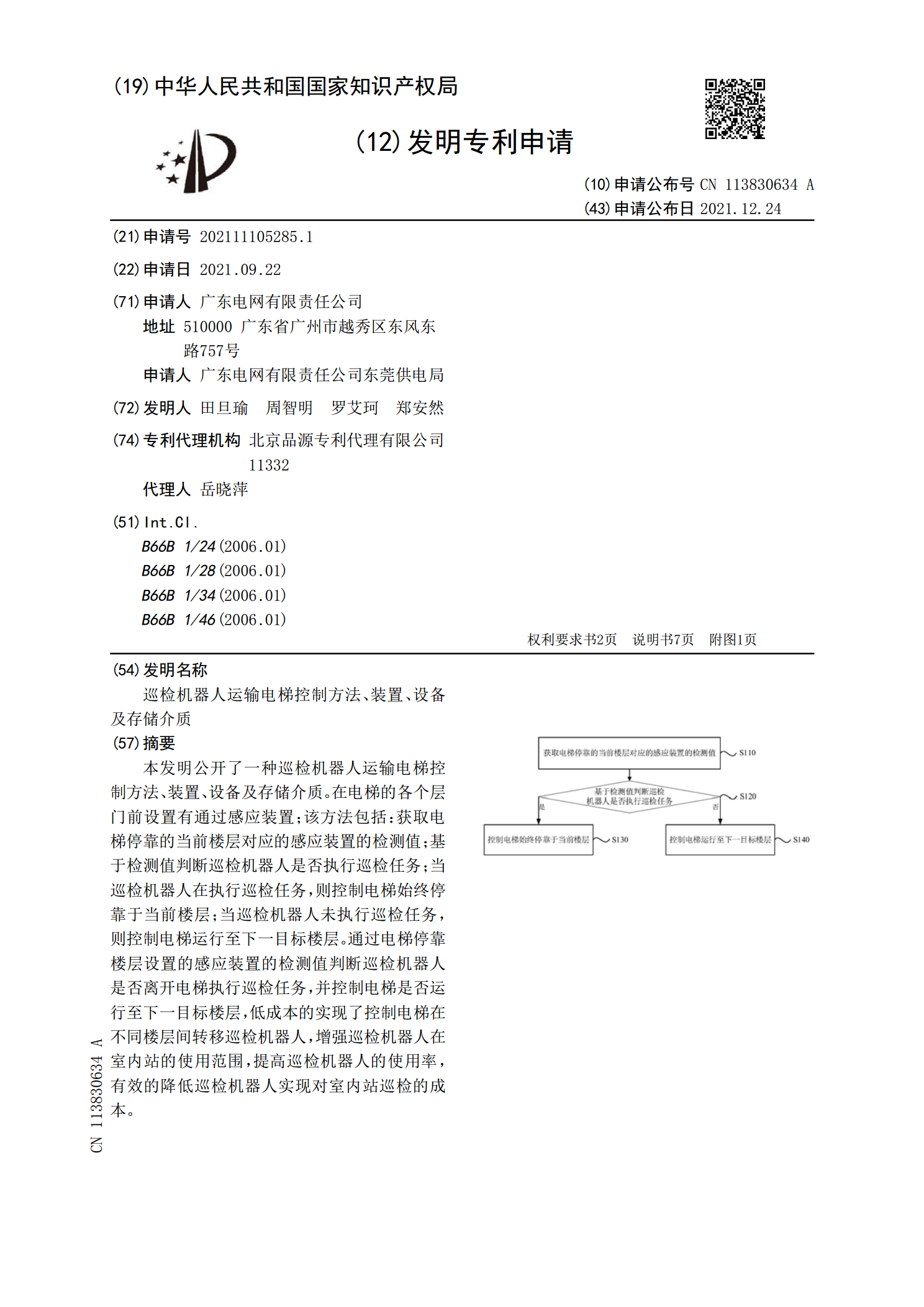
本发明公开了一种巡检机器人运输电梯控制方法、装置、设备及存储介质。在电梯的各个层门前设置有通过感应装置;该方法包括:获取电梯停靠的当前楼层对应的感应装置的检测值;基于检测值判断巡检机器人是否执行巡检任务;当巡检机器人在执行巡检任务,则控制电梯始终停靠于当前楼层;当巡检机器人未执行巡检任务,则控制电梯运行至下一目标楼层。通过电梯停靠楼层设置的感应装置的检测值判断巡检机器人是否离开电梯执行巡检任务,并控制电梯是否运行至下一目标楼层,低成本的实现了控制电梯在不同楼层间转移巡检机器人,增强巡检机器人在室内站的使用
巡检控制方法、装置、设备和存储介质.pdf
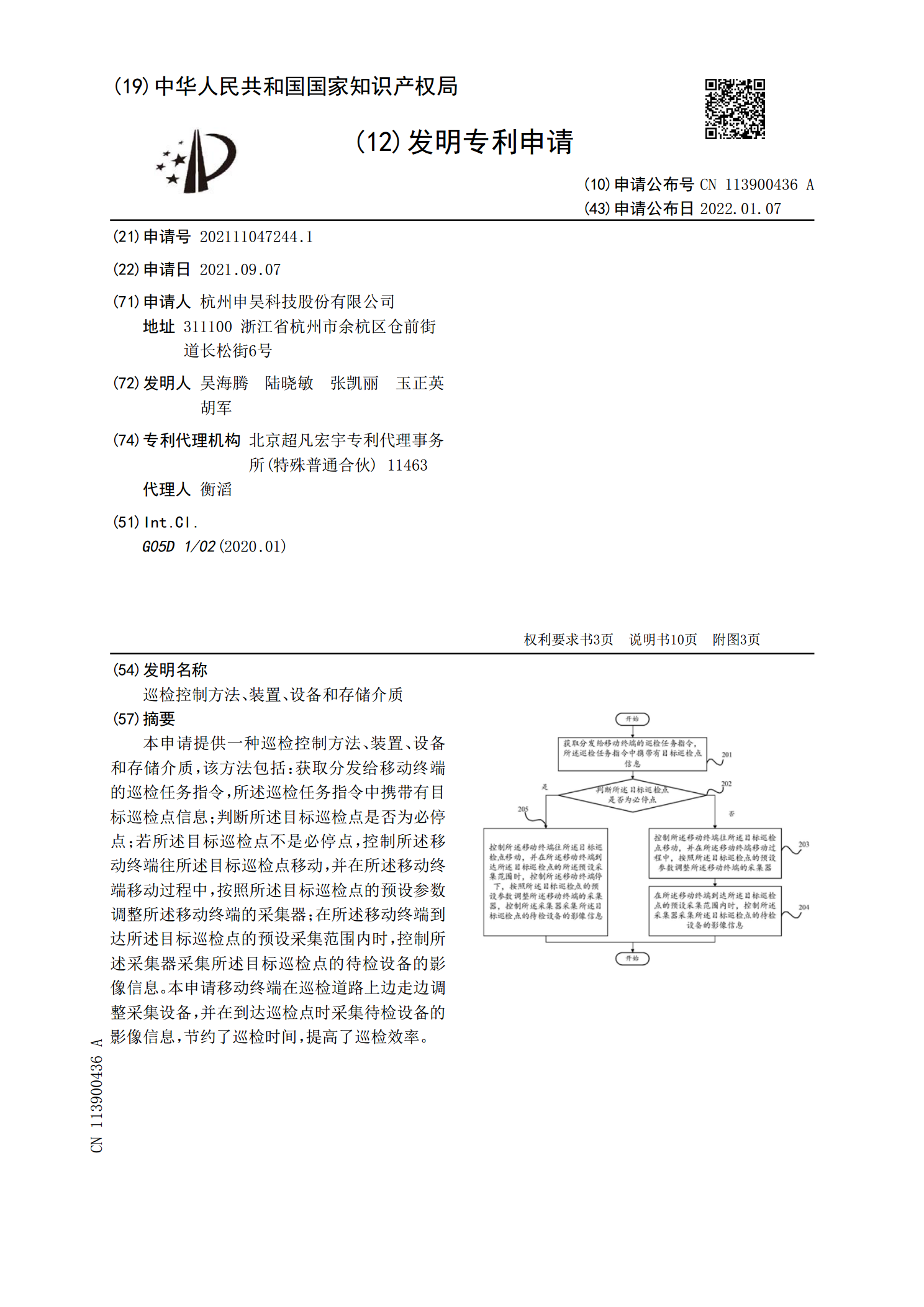
本申请提供一种巡检控制方法、装置、设备和存储介质,该方法包括:获取分发给移动终端的巡检任务指令,所述巡检任务指令中携带有目标巡检点信息;判断所述目标巡检点是否为必停点;若所述目标巡检点不是必停点,控制所述移动终端往所述目标巡检点移动,并在所述移动终端移动过程中,按照所述目标巡检点的预设参数调整所述移动终端的采集器;在所述移动终端到达所述目标巡检点的预设采集范围内时,控制所述采集器采集所述目标巡检点的待检设备的影像信息。本申请移动终端在巡检道路上边走边调整采集设备,并在到达巡检点时采集待检设备的影像信息,节
基于巡检机器人的智能巡检方法、装置、设备及存储介质.pdf
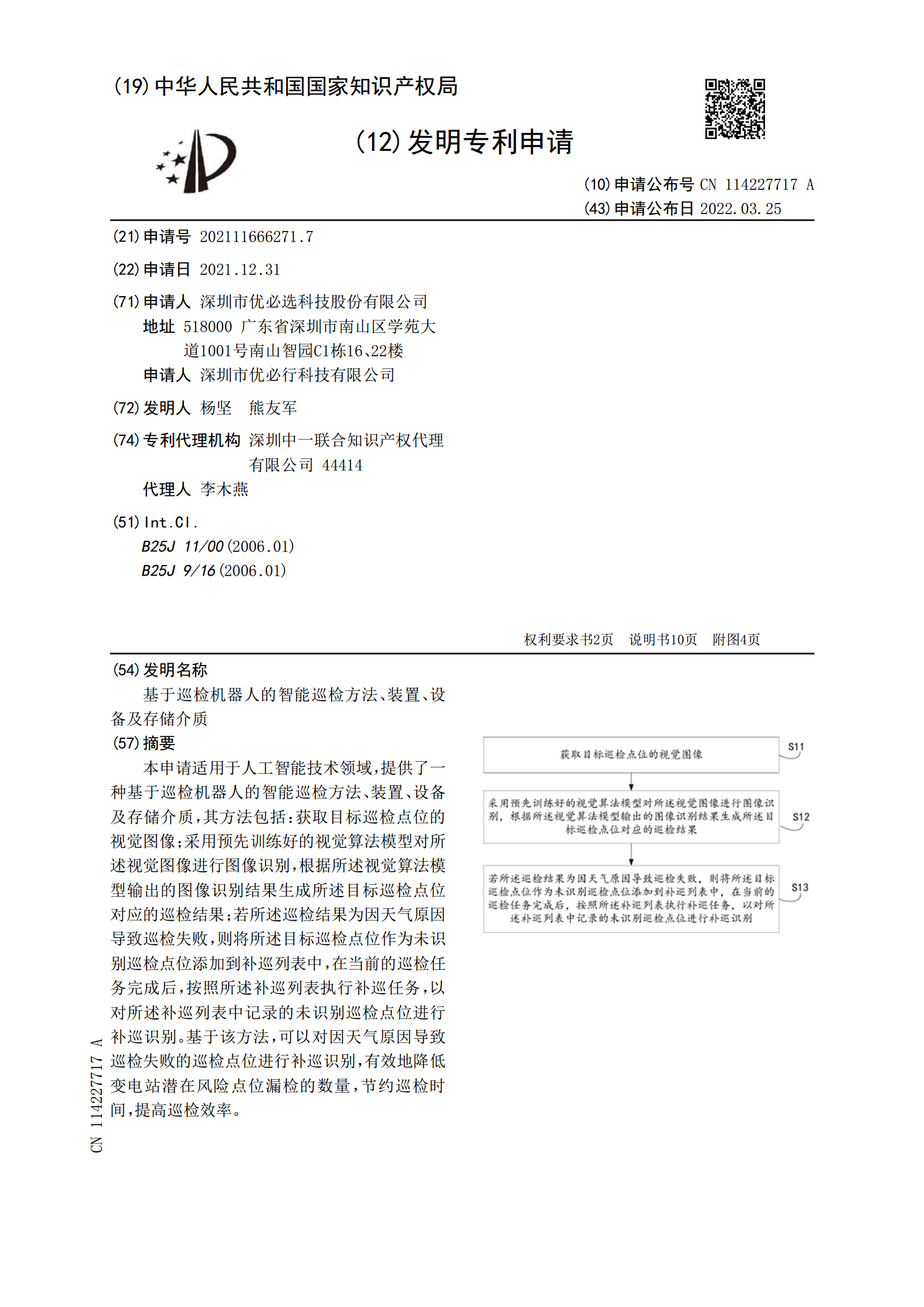
本申请适用于人工智能技术领域,提供了一种基于巡检机器人的智能巡检方法、装置、设备及存储介质,其方法包括:获取目标巡检点位的视觉图像;采用预先训练好的视觉算法模型对所述视觉图像进行图像识别,根据所述视觉算法模型输出的图像识别结果生成所述目标巡检点位对应的巡检结果;若所述巡检结果为因天气原因导致巡检失败,则将所述目标巡检点位作为未识别巡检点位添加到补巡列表中,在当前的巡检任务完成后,按照所述补巡列表执行补巡任务,以对所述补巡列表中记录的未识别巡检点位进行补巡识别。基于该方法,可以对因天气原因导致巡检失败的巡检
场地巡检方法、装置、设备及存储介质.pdf
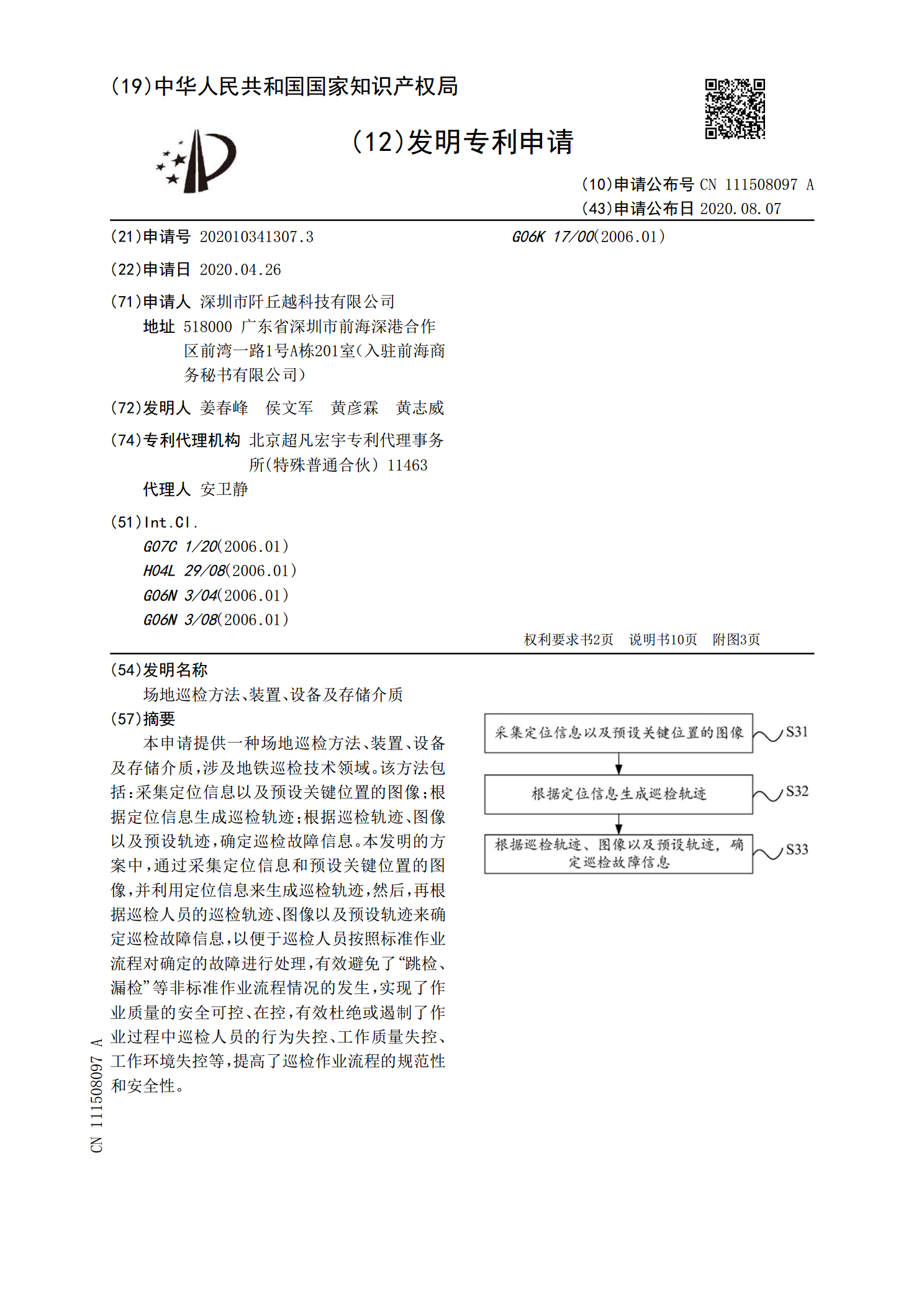
本申请提供一种场地巡检方法、装置、设备及存储介质,涉及地铁巡检技术领域。该方法包括:采集定位信息以及预设关键位置的图像;根据定位信息生成巡检轨迹;根据巡检轨迹、图像以及预设轨迹,确定巡检故障信息。本发明的方案中,通过采集定位信息和预设关键位置的图像,并利用定位信息来生成巡检轨迹,然后,再根据巡检人员的巡检轨迹、图像以及预设轨迹来确定巡检故障信息,以便于巡检人员按照标准作业流程对确定的故障进行处理,有效避免了“跳检、漏检”等非标准作业流程情况的发生,实现了作业质量的安全可控、在控,有效杜绝或遏制了作业过程中
机器人的控制方法、装置、设备及存储介质.pdf
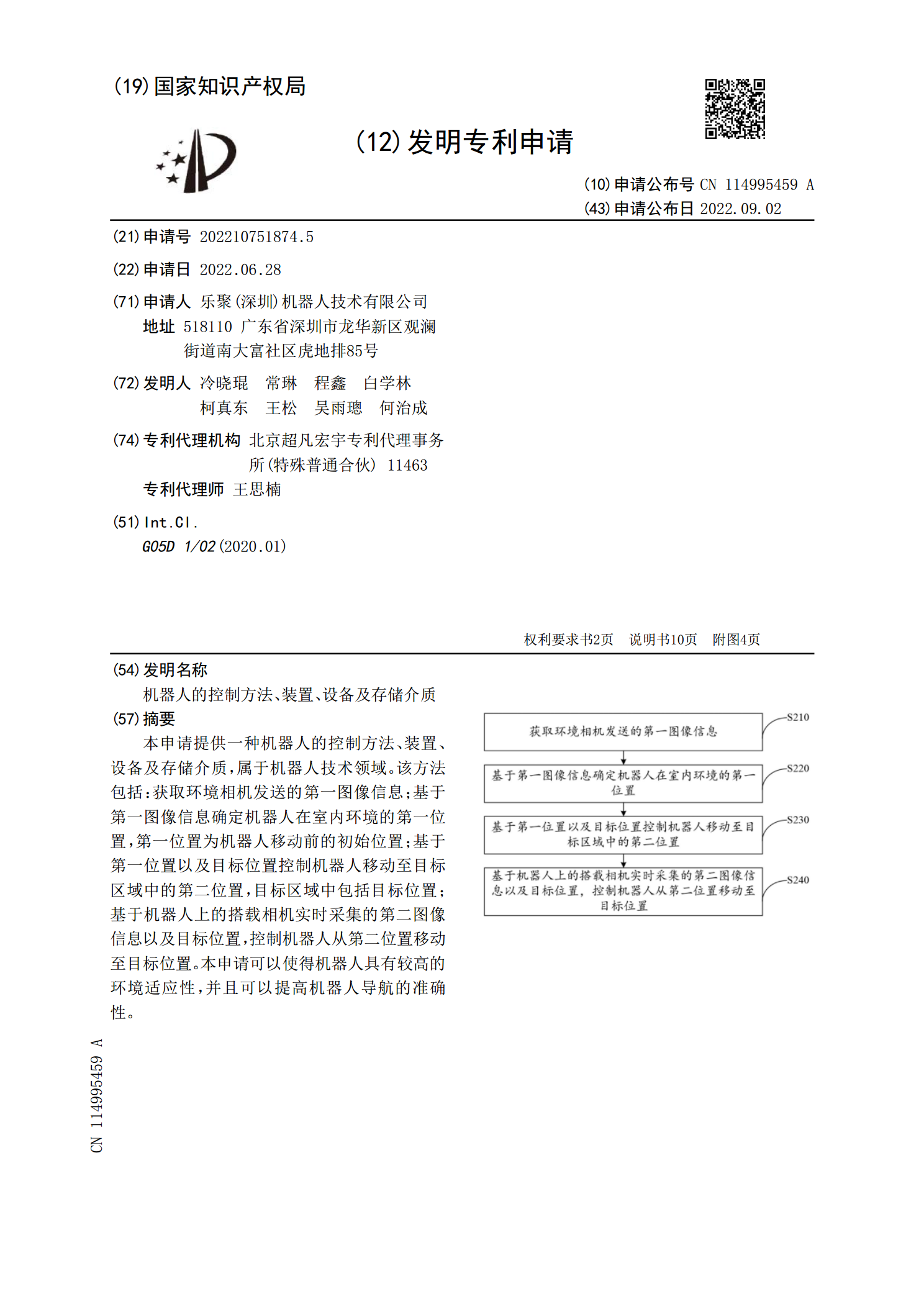
本申请提供一种机器人的控制方法、装置、设备及存储介质,属于机器人技术领域。该方法包括:获取环境相机发送的第一图像信息;基于第一图像信息确定机器人在室内环境的第一位置,第一位置为机器人移动前的初始位置;基于第一位置以及目标位置控制机器人移动至目标区域中的第二位置,目标区域中包括目标位置;基于机器人上的搭载相机实时采集的第二图像信息以及目标位置,控制机器人从第二位置移动至目标位置。本申请可以使得机器人具有较高的环境适应性,并且可以提高机器人导航的准确性。